Способы определения места судна с помощью РЛС
Общие сведения. Существует две группы способов использования судовой РЛС для определения места судна:
• поточечным ориентирам;
• по пространственным ориентирам.
Точечные ориентиры — это такие, размерами которых при прокладке линий положения можно пренебречь. Точечные ориентиры делятся на:
• активные отражатели, которые изображаются на экране в видеответной точки;
• пассивные отражатели, представляющие собой многогранные фигуры из металла, обладающие способностью отражать радиоволны без рассеивания. Наилучшей формой пассивных отражателей являются уголковые отражатели;
• естественные или искусственные ориентиры, которыми могут быть маяки, навигационные знаки, заводские трубы и т. п.

Рис.7.1. Определение места судна по радиолокационным расстояниям
В практике судовождения точечные ориентиры встречаются редко. Поэтому для определения места судна используются пространственные ориентиры. К ним относятся объекты, изображения которых на экране РЛС и карте имеют размеры и их нельзя принять за точку (береговая черта, холмы, мысы, не имеющие резких очертаний, бухты, острова и т. п.).
Определение места судна по расстояниям, измеренным до нескольких ориентиров (рис.7.1). Намечают перед определением места ориентиры на карте и быстро последовательно измеряют расстояния до них. При необходимости измеренные расстояния приводится код-ному моменту времени.
В момент последнего измерения замечается время и отсчет лага. На карте находится обсервованное место, которое является точкой пересечения дуг окружностей, проведенных из ориентиров (с учетом приведения их к одному моменту времени), как из центров с радиусами, равными измеренным расстояниям.
При выборе ориентиров необходимо следить за тем, чтобы линии положения пересекались под углом в пределах от 30 до 150°, причем сначала измеряется расстояние до ориентира, который близок к курсовому углу, равному 90°, а затем на ориентиры, курсовые углы которых близки к 0 или 180°.
На карте находится счислимая точка, указывается невязка, прокладывается линия пути, оформляются надписи.
Если при определении по трем расстояниям окружности не пересекаются в одной точке, то за обсервованное место принимается середина треугольника погрешностей. Если треугольник велик, то необходимо проверить правильность опознавания ориентиров, измерений и прокладки.
Радиальная средняя квадратическая погрешность определения места судна по расстояниям при двух ориентирах, кбт:
 =
=  (7.2)
(7.2)
где q - разность пеленгов на ориентиры, град; mD12 mD22- СКП измерения расстояний, кбт.
Определение места судна по радиолокационному пеленгу и расстоянию до одного ориентир. Способ применяется, если в пределах действия РЛС находится один ориентир. Для этого необходимо одновременно взять пеленг на ориентир и измерить до него расстояние, заметить время и отсчет лага. Затем проложить обратный пеленг (ИП±180°) от ориентира на карте. Из ориентира как из центра окружности с радиусом, равным измеренному расстоянию, провести дугу окружности. Место судна находится в пересечении пеленга с дугой окружности. Рассчитывается счислимая точка на момент измерения и показывается невязка.
При измерении пеленга его необходимо исправить поправкой гирокомпаса. Если же измерялся радиолокационный курсовой угол (РЛКУ) на ориентир, то истинный пеленг
ИП= ККГК + РЛКУ+DГК. (7.3)
При определении места судна по пространственным ориентирам необходимо учитывать особенности изображения берега на экране РЛС. Горы, холмы, возвышенности экранируют расположенные за ними местность, изображения от которой на экране не получается. Поэтому полуостров или мыс может быть принят за остров, что влечет за собой опасную ошибку в опознании ориентиров.
 Изображения ориентиров, расстояния между которыми меньше разрешающей способности станции, на экране сливаются: их трудно или невозможно различить. Объекты, облучаемые лучом станции "вскользь", почти касательно к их поверхности, наблюдаются очень плохо. Низкие пляжи, песчаные косы, ледовый припай у берега обнаруживаются лишь на малых расстояниях или даже не наблюдаются.
Изображения ориентиров, расстояния между которыми меньше разрешающей способности станции, на экране сливаются: их трудно или невозможно различить. Объекты, облучаемые лучом станции "вскользь", почти касательно к их поверхности, наблюдаются очень плохо. Низкие пляжи, песчаные косы, ледовый припай у берега обнаруживаются лишь на малых расстояниях или даже не наблюдаются.
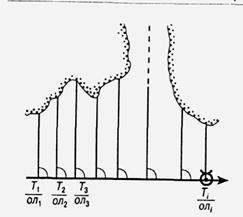
Рис.7.2. Опознание расчлененного берега по вееру радиолокационных пеленгов и расстояний
Опознание расчлененного берега но вееру пеленгов и расстояний (рис.7.3). Измерив пеленги и дистанции до видимых на экране РЛС ориентиров, на кальке из произвольной точки К надо провести меридиан и параллель, проложить истинные пеленги, а по ним отложить в масштабе карты измеренные расстояния. Затем кальку наложить на карту таким образом, чтобы точка находилась в районе счислимого места судна на момент измерений. Сохраняя ориентировку кальки относительно меридиана и параллели на карте, необходимо найти такое положение кальки, при котором наибольшее число отложенных расстояний "упрется" в контуры объектов береговой черты. Уколом циркуля место К следует перенести на карту и принять за ориентировочное. Для большей уверенности необходимо повторить опознавание несколько раз, связывая полученные обсервованные точки счислением. Отсутствие значительных расхождений укажет на то, что участок побережья опознан правильно.
Полученное место судна ненадежно и при удобном случае необходимо его определить другим способом.
Определение места судна по расстояниям, измеренным на постоянном курсовом угле (рис.7.4). Этот способ применяется, когда судно идет вдоль крутого, обрывистого и изрезанного берега.
На постоянном курсовом угле измеряются расстояния до берега через равные промежутки времени и замечаются соответственно отсчеты лага. На кальку наносится путь судна и пеленги с отложенными на них расстояниями.
|
Рис.7.3. Определение места судна по радиолокационным расстояниям, измеренным на постоянном курсовом угле
Кальку передвигают около счислимого места так, чтобы путь судна на карте был параллелен пути на кальке. Это делается с таким расчетом, чтобы наибольшее число точек, отмечающих измеренное расстояние, совпадало с береговой чертой.
Рассмотренный способ определения места не дает высокой точности.
Определение места судна до ближайших к нему участков берега(рис.7.4). Способ применяется при наличии в районе плавания крутых, обрывистых берегов.

Рис.7.4. Определение места судна до ближайших к нему участков берега
Быстро и последовательно измеряются расстояния до нескольких ориентиров. При этом подвижный импульс дальности необходимо совмещать с той частью радиолокационного изображения, которая больше всего выступает в сторону судна. Замечаются время и отсчет лага в момент измерения расстояния до последнего ориентира.
На кальке наносится линия пути судна и из произвольной точки О как из центра проводятся дуги окружностей радиусами, равными в масштабе карты измеренным расстояниям, и линии пеленгов.
Калька накладывается на карту около счислимого места судна и перемещается таким образом, чтобы проведенные на ней дуги окружностей касались береговой черты. В точке О делается накол острием циркуля и отмечается обссрвованное место судна.
Дата добавления: 2015-06-22; просмотров: 7073;