Induction Motor Action
Of all electric motors, the most popular is a three-phase induction motor, first designed by the known Russian engineer I.O. Dolivo-Dobrovolsky.
The induction motor is noted for its simple construction, and reliability. Just like any other ac machine, the induction motor consists of two basic parts, namely, an outer stationary structure called the stator and an inner revolving core called the rotor. An induction machine displays reversibility, i.e. it can run in the motoring and the generating mode. But the induction machine is seldom used as a generator because its operating characteristics are unsatisfactory for most applications.
The polyphase system produces a revolving magnetic field whose speed per minute is n1 = 60f1/p. The rotor is said to run at a synchronous speed when its speed and that of the revolving field are equal, n2 = n1. If n2 ≠ n1, the rotor revolves at an asynchronous speed with respect to the synchronous speed of the rotating field.
 In an induction motor, the motoring action takes place only when the rotational speed of the rotor is different from the synchronous speed of the magnetic field. The final speed of the rotor may differ little from that of the field, but it is always less than the synchronous speed of the magnetic field. The final speed of the rotor may differ little from that of the field, but it always less than the synchronous speed (n2<n1).
In an induction motor, the motoring action takes place only when the rotational speed of the rotor is different from the synchronous speed of the magnetic field. The final speed of the rotor may differ little from that of the field, but it is always less than the synchronous speed of the magnetic field. The final speed of the rotor may differ little from that of the field, but it always less than the synchronous speed (n2<n1).
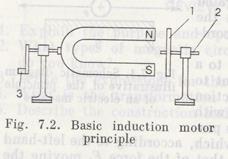
To illustrate the principle of an induction motor, consider the effect produced by the revolving horseshoe magnet on copper disk 1 mounted on its shaft 2 so that it can rotate freely (Fig. 7.2). If we rotate the magnet about its axis with handle 3, the disk will revolve in the same direction. This effect arises because the magnetic field of the revolving magnet cuts through the disk and induces eddy currents in it, which interact with the magnetic field and produce a force tending to rotate the disk. By Lenz's law, the induced current always opposes the motion or change in current which produces it. The eddy currents tend to oppose the motion of the magnet and cause the disk to rotate in the magnet direction. The rotational speed of the disk is always slightly less than the speed of the magnet. If these speeds became equal for one reason or another, the magnetic field would be stationary with respect to the disk and would not induce eddy currents producing the force that rotates the disk.
In the practical induction motor, the revolving magnetic field produced by a three-phase system performs the function of the rotating magnet in the case considered above. The revolving field of the stator cuts the conductors of the rotor winding and induces the emf in them, which forces the current to flow in the short-circuited winding. The magnetic field due to this current reacts with the revolving field and produces a torque which tends to turn the rotor in the direction of the revolving field. This is the same principle that produces the rotation of the disk described above.
To reverse the sense of rotation of the rotor, it is necessary that the synchronous field of the motor should rotate in the opposite direction. This can be done by changing the sequence of phases of the stator winding. For this, it is encugh to interchange the terminal connections of any two of the three stator winding leads drawing current from the supply circuit. Reversible motors are fitted with switches which can reverse the sequence of phases and thus the sense of rotation.
If we suppose that at some instant of time the speed of the rotor has become equal to the synchronous speed of the stator field, the rotor winding conductors will not cut the magnetic field of the stator and there will be no current in the rotor. In this case the torque will drop to zero and the rotor will slow down. The magnetic field will then again induce the current in the rotor. The rotor will develop the torque that counterbalances the braking torque comprising the load torque and the friction torque of the motor.
Дата добавления: 2015-06-17; просмотров: 1254;