Линейный вращающийся трансформатор (ЛВТ).
Для получения линейной зависимости выходного напряжения от угла поворота ротора α необходимо, чтобы это напряжение определялось уравнением
 , (3.96)
, (3.96)
где m – величина постоянная, определяемая магнитными и электрическими параметрами ЛВТ.
При m ≈ 0,54 зависимость (3.96) получается линейной с точностью до 1% в пределах изменения угла поворота  от 0° до 60° (рис. 3.62). Для получения указанной зависимости
от 0° до 60° (рис. 3.62). Для получения указанной зависимости  применяют следующую схему включения обмоток ЛВТ: синусную обмотку соединяют последовательно с компенсационной обмоткой, а косинусную обмотку замыкают на некоторое неизменное сопротивление ZC (рис. 3.63). При этом величина сопротивления ZC выбирается такой, чтобы обеспечить полное вторичное симметрирование обмоток при заданной нагрузке ZH.
применяют следующую схему включения обмоток ЛВТ: синусную обмотку соединяют последовательно с компенсационной обмоткой, а косинусную обмотку замыкают на некоторое неизменное сопротивление ZC (рис. 3.63). При этом величина сопротивления ZC выбирается такой, чтобы обеспечить полное вторичное симметрирование обмоток при заданной нагрузке ZH.
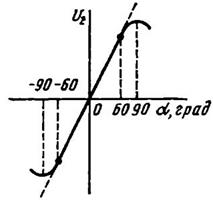
Рис. 3.62. Зависимость 
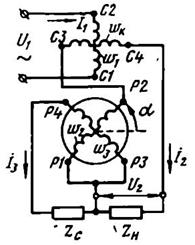
Рис. 3.63. ЛВТ со вторичным симметрированием
Для определения требуемой величины ZC можно воспользоваться уравнением:
 (3.97)
(3.97)
Иными словами, для полного вторичного симметрирования обмоток необходимо, чтобы полное сопротивление цепи косинусной обмотки было равно удвоенному полному сопротивлению цепи синусной обмотки (включая сопротивления компенсационной обмотки ZК и нагрузки ZH).
Однако полное вторичное симметрирование обмоток возможно лишь при неизменной нагрузке ЛВТ (ZH = const). В случае переменной нагрузки ЛВТ применяется схема первичного симметрирования обмоток (рис. 3.64), в которой обмотка возбуждения включается последовательно с косинусной обмоткой и сопротивлением ZC, а компенсационная обмотка замыкается на некоторое сопротивление ZHК. Сопротивления ZC и ZHК выбираются такими, чтобы магнитный поток компенсационной обмотки ФК и поперечный поток косинусной обмотки  , были взаимно скомпенсированы при любом значении угла .
, были взаимно скомпенсированы при любом значении угла .
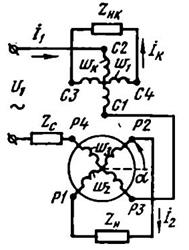
Рис. 3.64. Принципиальная схема ЛВТ с первичным симметрированием
Дата добавления: 2015-06-12; просмотров: 1251;