Геометрическая задача управления
Математическое обеспечение системы ЧПУ на прикладном уровне состоит из нескольких фундаментальных разделов, называемых задачами ЧПУ [1]. Важнейшей из таких задач является геометрическая (motion control), которая присутствует во всех без исключения системах ЧПУ типа PCNC. В свою очередь геометрическая задача состоит из трех крупных модулей: интерпретатора управляющих программ, интерполятора, модуля управления следящими приводами. Последний модуль сильно зависим от типа следящих приводов и способа замыкания позиционных контуров, в то время как для двух первых модулей могут быть предложены инвариантные решения. В этой связи остановимся на проблемах реализации двух первых модулей.
Интерпретатор управляющих программ. Интерпретатор транслирует кадры управляющей программы в коде ISO-7bit с целью представления данных во входном формате интерполятора. В фазе интерпретации кадра система ЧПУ выполняет эквидистантные расчеты и расчеты, связанные со стыковкой эквидистантных контуров; осуществляет преобразование координатных систем (в абсолютную или относительную системы) и преобразование систем измерения (в миллиметры или дюймы); вызывает стандартные циклы и подпрограммы; разделяет потоки данных геометрической, логической и других задач.
Интерполятор. Задачами модуля интерполяции являются уменьшение цены дискреты в приводе до 0,5 микрона и меньше; прямой выход на приводы, при котором перемещение в кадре задано в приращениях следящего привода, что необходимо при особо высоких скоростях подачи; разложение сложных перемещений на линейные комбинации основных перемещений. Подобные требования определяют новую (открытую) архитектуру интерполятора, в которой четко обозначены отдельные блоки.
Открытый интерполятор допускает свободное наращивание алгоритмов интерполяции и произвольную их комбинацию при воспроизведении сложных траекторий в многокоординатном пространстве
4.3.2 Логическая задача управления
Логическая задача, являясь по сути системой управления цикловой электроавтоматикой, реализуется двояко: программно в рамках системы ЧПУ или с помощью программируемого контроллера. Традиционный контроллер - это специализированный аппарат, дооснащенный терминалом в виде персонального компьютера. При этом возрастание мощности и уровня сервиса персонального компьютера позволяет объединить терминал, программатор и собственно контроллер в рамках единой компьютерной архитектуры с дополнительным модулем ввода-вывода сигналов электроавтоматики.
Существует прообраз, который называют системой РСС (Personal Computer- Controller -персональный программируемый контроллер). Прогнозируя развитие концепции РСС, можно постулировать такие ее особенности:
• использование однокомпьютерного варианта, с операционной системой Windows NT и расширением реального времени;
• увеличение числа функций интерфейса оператора за счет многорежимного управления и применения встроенных инструментальных систем программирования;
• поддержание в реальном времени динамических графических моделей (мнемограмм) управляемого объекта;
• построение терминальной части системы РСС по типу «виртуального прибора»;
• применение визуального программирования электроавтоматики (например, по типу графического языка HighGraph фирмы Siemens) с генерацией С++ кодов исполняемого модуля; организация многопоточного управления (multi-thread).
Управление электроавтоматикой станков с ЧПУ по типу виртуальных контроллеров SoftPLC
Сегодня появляется реальная возможность программной реализации управления электроавтоматикой станков в рамках общего программного обеспечения систем ЧПУ без привлечения дополнительной аппаратуры и системного программного обеспечения программируемых контроллеров, которые являются неотъемлемой частью практически любой современной системы ЧПУ. (Далее предполагаются системы ЧПУ, построенные на базе персональных компьютеров.) [3].
Подобные программные системы управления электроавтоматикой получили наименование виртуальных контроллеров SoftPLC. Указанный подход позволяет снизить стоимость системы управления при одновременном получении ряда преимуществ, в том числе упрощение общего программного обеспечения, уменьшение ошибок системного программирования, возможность отладки управляющих программ электроавтоматики в рамках самой системы ЧПУ, гибкость конфигурирования электроавтоматики, возможность использования различных коммерческих библиотек.
Далее предлагается объектно-ориентированный подход для построения виртуальных контроллеров электроавтоматики применительно к станкам с системами ЧПУ типа PCNC.
В основе технологии создания программного обеспечения электроавтоматики лежат обычные для объектно-ориентированного программирования понятия класса и объекта. При этом класс описывает тип оборудования, а объект - конкретный экземпляр. Таким образом, при объявлении класса, согласно принципу инкапсуляции, создаются шаблоны структур данных и методы, которые будут работать с этими данными. В объекте класса по шаблону выстраиваются конкретные данные и приводится ссылка на обслуживающий их процесс.
При появлении нового типа оборудования, благодаря механизму наследования, разработчик не нуждается в том, чтобы заново разрабатывать новый класс - достаточно выбрать наиболее близкий и реализовать отличия в новом классе. Тем самым обеспечивается простота модификаций, сокращаются затраты времени на разработку, снижается общая стоимость разработки.
Наиболее важен тот факт, что объектный подход позволяет создавать хорошо структурированные сложные системы управления электроавтоматикой. Основные преимущества, приобретаемые при этом, состоят в следующем:
• повышается уровень унификации разработки; для повторного использования пригодны не только управляющие программы, но и проекты в целом, что служит хорошей основой для построения среды разработки. Снижаются затраты времени и средств на создание нового проекта;
• возникает возможность повторного использования собственных функциональных модулей и готовых модулей других разработчиков, что делает систему управления открытой. Уменьшается вероятность ошибок при разработке сложных систем, увеличивается уверенность в правильности принимаемых решений.
Все эти достоинства обеспечиваются благодаря лежащим в основе объектно-ориентированной технологии принципам наследования, инкапсуляции и полиморфизма.
Архитектура виртуального контроллера
В системе ЧПУ виртуальный контроллер работает в среде операционной системы Windows NT с расширением реального времени RTX фирмы VentureCom [4]. Проектирование контроллера предполагает последовательное рассмотрение его модели на трех уровнях абстракции: уровне модели потоков (структуры потоков), уровне функциональных модулей и уровне программной реализации (рисунок 4.11).
Сначала рассмотрим структуру потоков. Основная задача контроллера состоит в одновременном выполнении нескольких команд и параллельной обработке внешних сигналов. Каждый процесс контроллера, который нуждается в выделении отдельного потока, выполняется в рамках основного процесса виртуального контроллера, запущенного под RTX. Процессорное время, выделяемое операционной системой основному процессу, должно быть распределено между потоками.
Далее воспользуемся идеей псевдомногопоточности на основе механизма выделения квантов (разделения времени). Процессорное время выделяется потокам отдельными квантами с помощью внутренних механизмов виртуального контроллера. В каждом кванте может выполняться только один поток.
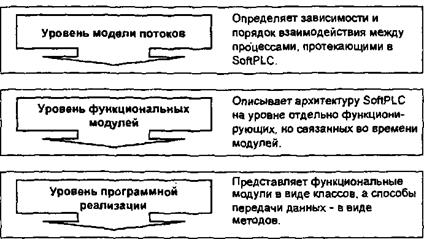
Рисунок 4.11- Последовательная трансформация модели виртуального контроллера SoftPLC
Все потоки разделены на группы по приоритетам, причем управление группой осуществляется отдельным программным таймером. Программный таймер аналогичен системному, реализованному в операционной системе, но не генерирует прерывания, и его обработчик запускается планировщиком (в нашем случае - модулем синхронизации). Выделение нескольких групп потоков в виртуальном контроллере связано с тем, что различные его задачи требуют разного времени реакции на внешнее воздействие: чем меньше время реакции, тем выше приоритет потока, обслуживающего задачу.
4.3.3 Терминальная задача управления
Терминальная задача в составе математического обеспечения ЧПУ имеет особое значение, поскольку предъявляет конечному пользователю функциональные возможности управления. Наполнение терминальной задачи определяет привлекательность и конкурентоспособность системы ЧПУ на рынке. Свойства открытой системы ЧПУ развиты настолько, насколько терминальная задача поддается конфигурации и расширению. Наиболее важными разделами терминальной задачи служат: интерпретатор диалога оператора в Windows-интерфейсе, редактор управляющих программ в коде ISO-7bit, редактор-отладчик управляющих программ на языке высокого уровня.
Интерпретатор диалога оператора в Windows-интерфейсе
Современные системы управления используют архитектуру персонального компьютера и располагают широкими возможностями организации человеко-машинного интерфейса MMI (Man-Machine Interface) в операционных средах Windows NT или Windows 95/98/2007. Терминальную задачу управления обычно сводят к проблеме построения MMI; в этом случае задача выполняет функции клиента в клиент-серверной архитектуре математического обеспечения системы управления. Проектирование MMI-приложения предполагает создание скелета приложения, реализацию экранов, разработку интерпретатора диалога, организацию информационных сессий с другими модулями системы управления.
К редактору управляющих программ предъявляют как стандартные требования, характерные для текстового редактора, так и ряд специфических требований. К стандартным требованиям относятся:
• ввод и редактирование текста, скроллинг и перелистывание страниц; операции перехода, контекстного поиска и замены;
• блоковые операции маркировки, удаления, копирования, перемещения, загрузки и добавления блоков.
К специфическим требованиям относятся:
• перенумерация после изъятия-включения кадров;
• изменение масштаба и размерности;
• вывод активных G-функций (G-вектора) на основе предыстории кадра;
• синтаксический и семантический контроль;
• диалоговый (графический) ввод кадра и параметров стандартных циклов (файлы графической помощи находятся в составе конфигурационного файла);
• создание управляющих программ (УП) в режиме обучения.
Средства отладки программ включают:
• пространственное графическое моделирование траектории инструмента с различением (по цвету, типу и толщине линий) быстрых и рабочих перемещений;
• активное использование точек останова (break points), используемых, в том числе, для выделения фрагментов графического изображения;
• масштабирование графического изображения (zooming);
• поддержку различных режимов изображения (пошаговый, автоматический, между точками останова, со skip-пропуском);
• моделирование оставшейся части программы по отношению к текущей позиции станка.
Подобные возможности требуют включения в состав редактора некоторого ядра и дополнительных подсистем: интерпретатора управляющих программ (для любых версий кода ISO-7bit) и имитатора интерполятора для рисования траекторий.
Говоря о редакторе, необходимо затронуть проблему представления управляющих программ в коде ISO-7bit. Стандарт этого кода, принятый в 1970-х годах, практически не перетерпел изменений и тормозит использование сложных алгоритмов интерполяции (таких, как сплайновая интерполяция в реальном времени), управление лазерной и электроэррозион- ной обработкой и др. По этой причине производители систем ЧПУ используют собственные версии кода ISO-7bit в соответствии с потребностями своего круга пользователей. Многие версии не имеют четкой структуры, а их синтаксис базируется скорее на исключениях, чем правилах, поскольку версии создавались без общей концепции и расширялись стихийно. Тем не менее код ISO-7bit остается действующим стандартом и ни одна система ЧПУ не может его игнорировать. Заметим также, что все CAD-CAM системы генерируют выходной файл в формате ISO-7bit. В этой связи существует потребность в редакторе, конфигурируемом под конкретную версию кода ISO-7bit.
Редактор-отладчик управляющих программ на языке высокого уровня (в составе терминальной задачи)
В числе языков высокого уровня управляющих программ можно упомянуть AnlogC (фирма Andron, Германия), CPL (фирма Bosch, Германия) и множество других. Независимо от версии структуры всех языков однотипны: имеется основная программа и некоторый набор вызываемых подпрограмм. В теле программы представлен список переменных, которые по ходу реализации программы меняют значения. Процесс выполнения сопровождается информационными сообщениями, предупреждениями, сообщениями об ошибках.
4.3.4 Диагностическая задача управления
Наиболее совершенные системы ЧГГУ располагают отдельным режимом диагностики, который реализован в виде программно-аппаратного комплекса и ориентирован на тестирование и глубокое исследование логической и геометрической задач управления. Диагностика, как правило, выполняется «вне реального времени», что означает- измерения сохраняются в памяти, а затем анализируются. Подсистема диагностики способна конфигурировать измерения, считывать измеряемые сигналы, запоминать результаты измерений вместе с результатами конфигурации измерений, распечатывать осциллограммы измерений, считывать файлы с результатами измерений и результатами конфигурации измерений, выполнять разнообразные операции над измеренными сигналами. Для диагностики логической задачи управления служит логический анализатор, а для диагностики геометрической задачи предназначен осциллограф.
К числу важнейших в практике диагностических измерений относятся такие понятия, как триггер, точка измерения, сигнал, состояние процесса измерения, виртуальный прибор диагностики.
Триггеры используют для формирования события, устанавливающего границы измерительного горизонта.
Группа стартовых триггеров устанавливает начало измерения, а окончание измерения определяет группа конечных триггеров. Кроме того, существуют триггеры специального назначения, например для выделения в процессе измерения некоторого события. Группа срабатывает при выполнении логических операций над ее триггерами.
Точки измерения представляют собой адреса аппаратных средств, осуществляющих измерительный процесс. Сигналы являются результатами измерительного процесса. Процесс измерения включает несколько фаз, которые назовем состояниями измерительного процесса; в числе возможных состояний - «конфигурация», «начало измерения», «ожидание», «конец измерения», «ошибка».
Под виртуальным прибором диагностики будем понимать ActiveX-элемент, предоставляющий результаты диагностических испытаний и создающий внешний образ измерительного устройства, например логического анализатора или осциллографа.
Дата добавления: 2015-05-26; просмотров: 4763;