Лекция 14
Система PCNC-2
К этому классу принадлежат системы фирм ANDRON и BoschRexroth (Германия). Система ЧПУ фирмы ANDRON относится к полному двухком- пьютерному варианту. Ее структура представлена в виде набора модулей: терминального компьютера, ЧПУ-компьютера, панели оператора и монитора, удаленных входов-выходов программируемого контроллера, одной или нескольких групп цифровых (SERCOS) приводов подачи и главного привода. Аппаратура системы практически полностью состоит из покупных компонентов и плат. В силу этого обстоятельства фирма ANDRON не скрывает деталей аппаратной реализации, и эта реализация весьма представительна для двухкомпьютерных версий систем ЧПУ других фирм.
В состав терминального компьютера входят: материнская плата с Се1еrоn-процессором и интегрированными контроллерами SCSI, VGA, TFT, IDE; многофункциональная интерфейсная плата MFA с памятью CMOS- ROM (связь с внешним модемом; транспьютерный контроллер коммуникационного канала, связывающего терминальный и ЧПУ-компьютеры). Все платы установлены на пассивной ISA-шине, при этом предусмотрена установка дополнительных (по заказу) резервных плат: внутреннего модема, сетевой платы, SCSI-платы. Для специальных задач возможна установка PCI-плат.
В состав ЧПУ-компьютера входят: материнская плата с Celeron-npo- цессором; плата МIO (Main Input-Output) поддержки как коммуникационного интерфейса с терминальным компьютером (со скоростью 10 Мбит/с), так и интерфейса маховичка ручного перемещения; плата программируемого контроллера с интерфейсом InterBus-S (с циклом 4 мс для 1024 входов-выходов); одна или несколько плат SERCOS-интерфейса (с микросхемой SERCON410-B). Все платы установлены на пассивной ISA-шине. Каждый SERCOS-интерфейс обслуживает (с периодичностью 0,5 мс) одну группу из трех автономных приводов подачи и одного привода шпинделя. Приводы одной группы включены в кольцевую оптоволоконную сеть.
В платформе системы ЧПУ фирмы ANDRON аппаратный уровень расположен под операционной системой Windows NT в терминальном компьютере и оригинальной операционной системой реального времени в ЧПУ- компьютере. На прикладном уровне терминальный компьютер открыт для разнообразных приложений и специальных диалогов конечного пользователя, которые можно назвать САМ-приложениями. Для построения САМ-приложений предусмотрен инструментальный язык ANLOG-C, обеспечили доступ к функциям ядра в ЧПУ-компьютере
Система ЧПУ фирмы BoschRexroth построена на основе высокопроизводительных компьютеров (классический двухкомпь- 1ый вариант) и обладает исключительно мощным набором функций. Терминальный компьютер имеет операционную систему Windows NT, а ЧПУ-компьютер - операционную систему UNIX. Связь операционных сред осуществляется с помощью протоколов TCP/IP, что опускает удаленное размещение терминала и работу нескольких терминалов с одним ЧПУ-компьютером. В свою очередь ЧПУ-компьютер предполагает многоканальную работу более чем с одной управляющей программой. Прикладное математическое обеспечение терминального компьютера и прикладное математическое обеспечение ядра в ЧПУ-компьютере окружены оболочкой из нескольких сот интерфейсных API-функций (Application Programming Interface), которые предоставляют конечным пользователям возможность разрабатывать собственные приложения и расширения. В оболочку терминального компьютера включена мощная DLL-библиотека NCS (Numerical Control System) классов объектов, «покрывающая» API-функции, делающая разработку дополнительных приложений более простой и комфортной. В остальном состав прикладного математического обеспечения традиционен; впрочем, можно отметить хорошо проработанный программно-реализованный контроллер электроавтоматики и несколько очень интересных приложений. Среди них - отладчик высокоуровневых управляющих программ, логический анализатор для удаленного контроля программируемых контролеров, осциллограф для анализа динамики следящего привода, в том числе и с помощью рассчитываемых здесь же частотных характеристик.
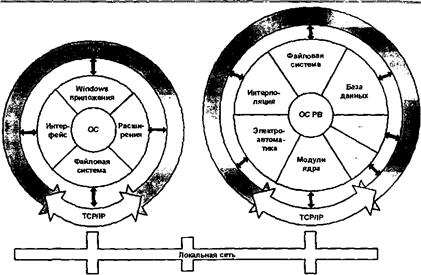
Рисунок 4.3- Архитектура системы ЧПУ класса PCNC-2 фирмы BoschRexroth: ОС-операционная система; ОС РВ-операционная система реального времени
Система PCNC-3
Типичным представителем систем этого класса является система фирмы DeltaTau (Великобритания). Она относится к двухкомпьютерному варианту, но такому, при котором ЧПУ-компьютер выполнен в виде отдельной платы РМАС (Programmable Multi-Axes Controller), устанавливаемой на ISA (или РС1)-шине терминального персонального компьютера (рисунок 4.4). Терминальный компьютер с Windows NT операционной системой выполняет классические функции терминальной задачи и функции интерпретатора управляющих программ. Одноплатный ЧПУ-компьютер РМАС (процессор Motorola 56300) решает геометрическую и логическую задачи [2, 3], выполняя функции интерполятора, контроллера управления приводами (подачи и шпинделя), программно-реализованного контроллера электроавтоматики.
Интерполятор обеспечивает все виды интерполяции (включая сплай- новую), разгоны и торможения, опережающий просмотр кадров Look Ahead, циклическое формирование управляющих воздействий с периодом 440 мкс (в этом же периоде в фоновом режиме работает и контроллер электроавтоматики).
Контроллер приводов способен управлять 32 координатными осями, сгруппированными в 16 координатных систем; он принимает сигналы позиционных датчиков обратной связи, замыкает позиционные контуры, выполняет функции ПИД-регулятора, имитирует в цифровом виде сигналы обратной связи по скорости, вырабатывает (в цифровом виде) широтно-импульсный сигнал для приводов подачи и сигнал ±10В для привода главного движения. Программно-реализованный контроллер электроавтоматики поддерживает параллельное управление 64 циклами электроавтоматики.
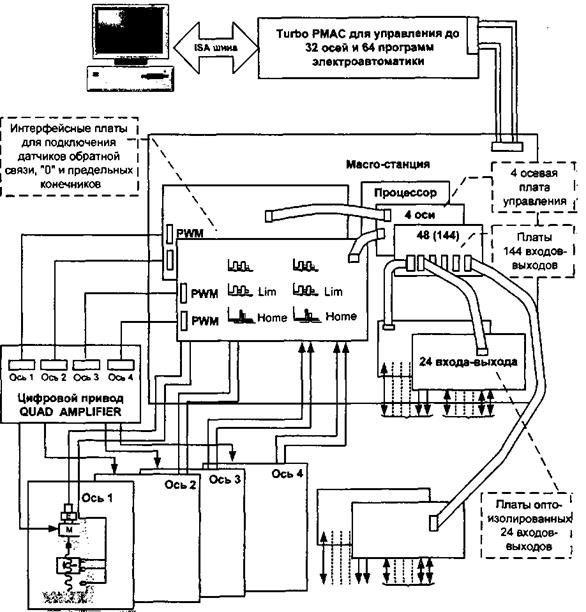
Рисунок 4.4- Архитектура системы ЧПУ класса PCNC-3 фирмы DeltaTau: PWM - Pulse Width Modulation, щиротно-импулъспая модуляция; Lim (Limit) - ограничители; Home - нулевая точка
Выходные сигналы (для управления приводами и электроавтоматикой) поступают в кольцевой оптоволоконный канал (со скоростью передачи данных 125 Мбит/с) для дистанционного управления своими объектами. Принимающим устройством служит интеллектуальный периферийный терминал Масго-станция (Motion and Control Ring Optical). Допустимо включение в кольцо нескольких таких терминалов. Терминал замыкает скоростные контуры восьми приводов и принимает сигналы ограничителей рабочей зоны и датчиков нулевых точек координатных систем (в блоках ACS), формирует сигналы управления двигателями любого типа (асинхронными, постоянного тока и др.) с помощью блока Quad Amplifier (для управления четырьмя двигателями общей мощностью до 25 кВт). Другая функция периферийного терминала - управление электроавтоматикой через модули оптоизолированных входов-выходов.
Набор модулей фирмы DeltaTau (РМАС и Macro) ориентирован на построение собственных систем ЧПУ у конечных пользователей, на долю которых остается разработка терминальной задачи, и интерпретатора в среде промышленного персонального компьютера. Однако сами модули являются для конечного пользователя «черными ящиками» и их архитектура закрыта.
Лекция 15
Системы PCNC-4
Система ЧПУ фирмы Beckhoff (Германия) демонстрирует яркий пример чисто однокомьютерной архитектуры PCNC, в рамках которой все задачи управления (геометрическая, логическая, терминальная) решены чисто программным путем, без какой-либо дополнительной аппаратной поддержки (рисунок 4.5).
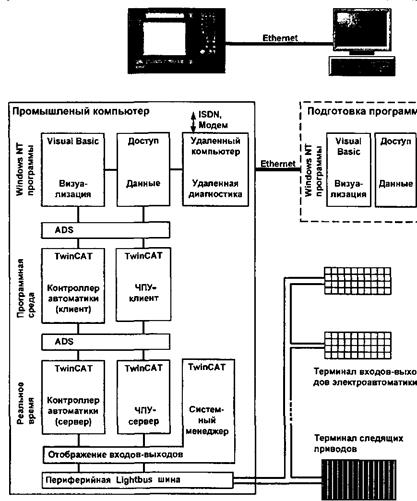
Рисунок 4.5- Архитектура системы ЧПУ класса PCNC-4 фирмы Beckhojf
Внешний интерфейс выстроен на базе любой стандартной (по выбору) периферийной шины Fieldbus, в частности на базе шины Lightbus фирмы Beckhoff. Эта шина выполнена в виде кольцевого канала для передачи сигналов управления автономными следящими приводами, а также сигналов электроавтоматики. Выход к объектам осуществляется с помощью периферийных терминалов ввода-вывода. Операционная среда представляет собой комбинацию Windows NT для поддержания процессов машинного времени и системы TwinCat (Total Windows Control and Automation Technology).
Операционная система TwinCat фирмы Beckhoff интегрирована в Windows NT, добавляет ей функции реального времени, не изменяя самой Windows NT. Перемещение данных и доступ к прикладным функциям API программных модулей осуществляется через программную шину ADS (Automation Device Specification).
Системный менеджер, являющийся подсистемой TwinCat, служит центром системной конфигурации, поддерживающим синхронное или асинхронное взаимодействие всех процессов, а также ввод-вывод сигналов управления. На прикладном уровне в потоках управления работают программные модули ЧПУ и программируемые контроллеры, имеющие клиентскую (для подготовки данных) и серверную (для работы в реальном времени) части. ЧПУ-клиент интерпретирует кадры управляющей программы в стандарте DIN 66025, а ЧПУ-сервер выполняет интерполяцию в группах приводов - по три координаты в группе. Группы формируются системным менеджером. Для безэквидистантных программ можно обойтись без интерпретации, которую заменяет компилятор клиента контроллера автоматики. Одновременно работают до четырех контроллеров (виртуальных процессоров, выполненных в стандарте IEC 1131-3), каждый из которых решает четыре задачи, имеющих свой приоритет и свое время цикла.
Система ЧПУ фирмы Power Automation (Германия) построена на основе промышленного персонального компьютера с PCI-шиной (рисунок 4.6), операционной системой Windows NT и ядром реального времени (собственной разработки). Операционная система Windows NT поддерживает работу интерфейса оператора, в том числе системы программирования ЧПУ и контроллера электроавтоматики, встроенную САМ-систему (опирающуюся на базы данных инструментов, материалов и технологических циклов), приложения конечного пользователя. Ядро реального времени синхронизирует задачи ЧПУ с электроавтоматикой, диспетчеризует работу интерпретатора, интерполятора и модуля управления следящими приводами. Одновременно могут работать до восьми каналов ЧПУ и два программно-реализованных контроллера электроавтоматики с разными приоритетами.
Система имеет открытую архитектуру, которая допускает расширение функций ядра ЧПУ за счет специальных функций пользователя (compile cycles - терминология Power Automation) (рисунок 4.7; см. также описание системы Siemens), и исключительно мощное сетевое окружение, как внешнее (Ethernet-TCP/IP, Novell), так и периферийное (восемь оптоволоконных SERCOS-колец для 64 следящих приводов, InterBus-S, Profibus DP, CAN-Bus, ASI-BUS). Кроме того, предусмотрены собственная периферийная SUPERBUS-шина для удаленных входов-выходов электроавтоматики, а также удаленные входы-для стандарта фирмы OMRON (Япония) на PCI-шине.
Фирма Siemens не раскрывает особенностей своей архитектуры, этом плане можно лишь строить догадки. Однако обращает на себя внимание механизм поддержания открытой архитектуры, который абсолютно идентичен такому же механизму фирмы Power Automation.
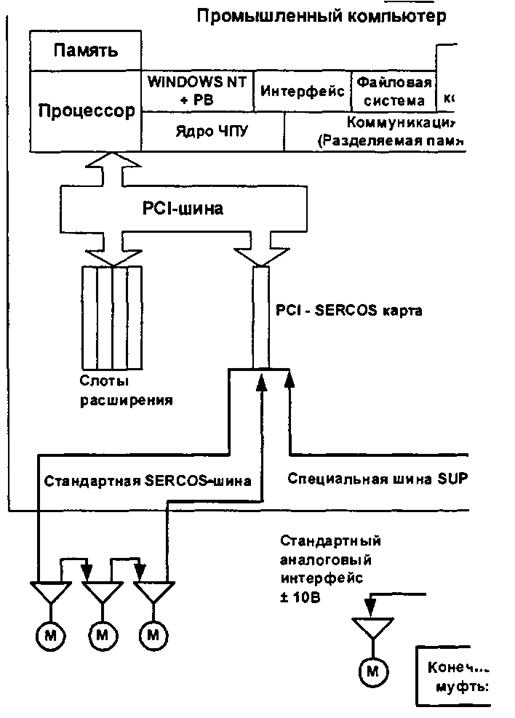
Рисунок 4.6- Архитектура системы ЧПУ класса PCNC-4 фирмы РВ-ядро реального времени
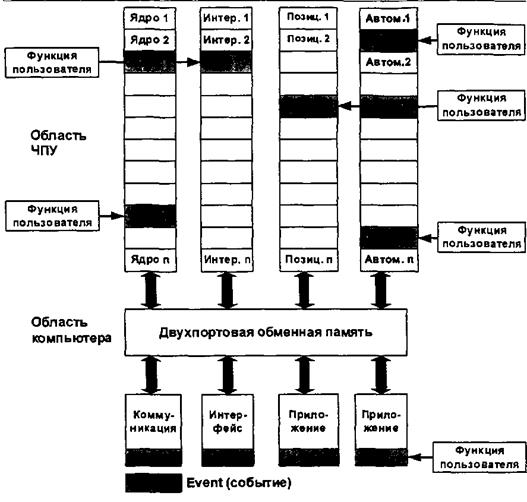
Рисунок 4.7- Схема расширения функций ядра ЧПУ в системе фирмы PowerAutomation: Ядро-модули ядра ЧПУ; Интер. -модули интерполяции;
Позиц. -модули связи со следящими приводами подачи;
Автом. -модулиуправления электроавтоматикой
В этой связи, по-видимому, можно предположить и идентичность архитектур Siemens и Power Automation.
При разработке новой модели системы ЧПУ фирма Siemens сделала акцент на открытую для конечного пользователя архитектуру со стороны как интерфейса оператора, так и ядра системы. Интерфейс оператора работает в операционной системе Windows NT, поэтому включение в интерфейс windows-приложений проблемы не составляет. Однако возможна и сравнительно глубокая реконфигурация интерфейса с помощью оригинальной инструментальной системы ProTooI.
Для расширения функций ядра предложена схема, в соответствии с которой в процессы ядра включены своеобразные точки останова «breakout-points», называемые «events» (события). События инициируют фрагменты пользовательского кода на Visual С++, называемого здесь «compile cycles» (скомпилированные циклы). Скомпилированные циклы имеют унифицированный интерфейс OPI (OEM Program Interface), что обеспечивает им стандартный доступ к системным данным и функциям посредством механизма связывания «binding». С другой стороны, скомпилированные циклы могут использовать и собственные данные. Такой подход обеспечивает полную совместимость расширенного программного обеспечения системы ЧПУ.
Для сравнения обратимся вновь к архитектуре системы ЧПУ фирмы Power Automation. Даже беглое сопоставление и одинаковая терминология указывают на то, что в обоих случаях использованы одинаковые механизмы внедрения функций конечного пользователя, т.е. одинаковый подход к реализации открытой архитектуры.
В спектре архитектурных решений наиболее уверенные позиции занимает концепция PCNC, при этом по мере роста вычислительной мощности процессоров все чаще предпочтение отдают однокомпьютерному варианту. В качестве операционной системы стандартом де-факто стала Windows NT с расширением реального времени [4]. Программируемые контроллеры реализуют программным путем в рамках единой вычислительной среды для ядра ЧПУ, а терминал системы ЧПУ используют для программирования электроавтоматики.
Периферия систем ЧПУ становится сетевой, причем все чаще единая сеть используется как для приводов подачи, так и для системы управления электроавтоматикой. Наиболее значительная тенденция состоит в развитии идей открытой архитектуры [5], предоставляющей конечному пользователю широкие возможности для реализации собственных функций.
Дата добавления: 2015-05-26; просмотров: 1772;