Регулирование давления пара перед турбиной
' Регулирование давления пара осуществляется путем:
изменения расхода пара на турбину;
изменения генерации пара;
сброса пара в конденсаторы и другие сбросные устройства.
Первый способ регулирования может быть применен только при работе турбины на мощную энергосистему (частота которой практически не зависит от мощности, вырабатываемой данной турбиной) и осуществляется путем воздействия регулятора давления на синхронизатор турбины.
. Действительно, если, например, увеличивается частота сети, регулятор частоты вращения турбины прикрывает регулирующие клапаны, вызывая тем самым уменьшение расхода пара на турбину и ее мощности. Отсутствие баланса между генерацией пара и его потреблением приведет к увеличению давления пара перед турбиной, что заставит регулятор давления перемещать синхронизатор турбины в сторону, соответствующую открытию клапанов, возвращая расход пара и мощность турбины к прежнему значению, но уже при новой частоте. С другой стороны, например, при увеличении мощности реактора, а следовательно, и генерации пара будет происходить повышение давления, и регулятор давления будет с помощью синхронизатора открывать клапаны турбины при той же частоте системы.
Схема с воздействием регулятора давления на синхронизатор турбины применяется на станциях, работающих как в базисном так и в регулирующем режимах. В последнем случае задание регулятору мощности реактора должно меняться, в зависимости от частоты сети и требуемой мощности блока.
Другим способом поддержания давления, применимым только в регулирующем режиме работы блока, является воздействие регулятора давления на задатчик мощности (или непосредственно на регулирующие органы) реактора. В этом случае изменение частоты сети и связанное с ним перемещение регулирующих клапанов также приводят к изменению давления, но регулятор меняет не потребление, а генерацию пара, приводя ее к новому значению, требуемому турбиной.
Регулирование давления путем сброса пара в специальные пароприемные устройства является наиболее быстродействующим способом и широко применяется на АЭС в аварийных ситуациях (срабатывание стопорных клапанов одной из турбин, отключение турбогенераторов блока от сети). Обычно предусматривается несколько устройств, принимающих пар в этих режимах (конденсаторы турбин, технологические конденсаторы, барботеры), кроме того, возможен сброс пара в атмосферу. Нормально клапаны, управляющие сбросом пара, закрыты и открываются либо при появлении сигнала об аварийной ситуации, либо при повышении давления перед турбиной. С помощью этого метода можно отрабатывать возмущения, связанные лишь со снижением потребления пара. Для отработки возмущений, связанных с увеличением потребления пара при постоянной мощности реактора, необходимо иметь постоянный сброс пара, уменьшая который можно добиться быстрого увеличения мощности турбины. Из-за своей очевидной неэкономичности этот способ не нашел широкого применения на АЭС и может быть рекомендован лишь в исключительных случаях, например если в связи с необходимостью регулирования частоты системы к мобильности АЭС предъявляются дополнительные требования, превосходящие возможности реактора.
Одним из способов построения системы регулирования давления сбросом пара является установка нескольких астатических регуляторов, каждый из которых управляет своим клапаном, изменяющим сброс в одно из пароприемных устройств. Заданное значение давления этих регуляторов должно быть выше значения, поддерживаемого основным регулятором, с тем, чтобы при нормальной работе клапаны сброса были бы закрыты. Если существует несколько устройств, которые должны включаться в определенной последовательности, уставки управляющих ими регуляторов различаются (регуляторы, включающиеся раньше, имеют более низкое заданное значение давления). Разность между уставками должна быть такой, чтобы их последовательность сохранялась при возможных погрешностях датчиков и регуляторов (1,5— 3,0кгс/см2). При большом уменьшении нагрузки сначала будет работать основной регулятор; в случае, если повышение давления достигнет уставки первого регулятора сброса (например, в конденсатор турбины), он включится в работу. Дальнейшее повышение давления вызовет срабатывание второго регулятора сброса (например, в барботер). Если не считать начального периода, сброс пара через клапан второго регулятора будет происходить только в том случае, если полностью открытый клапан первого регулятора не может пропустить всего необходимого расхода. Недостатками такой схемы могут считаться относительно высокая уставка срабатывания последующих регуляторов и некоторая задержка в открытии сбросных клапанов, так как они начинают открываться только после того, как давление поднимается на значительную величину спустя некоторое время после сброса нагрузки.
Цифровые регуляторы, входящие в состав СЦАР, обеспечивают поддержание регулируемых параметров в заданных пределах и с заданной степенью точности (в соответствии с техническими требованиями к алгоритмическому обеспечению СЦАР) с учетом сложной обратной связи регуляторов, в состав которой входят влияющие на объект регулирования другие технологические параметры, не являющиеся регулируемыми.
Объектами регулирования СЦАР являются технологические системы, оборудование в объеме машзала турбоустановки К-1000-60/1500-2.
К таким объектам относятся:
- собственно турбоустановка (ЭГСР - регулирование частоты вращения и мощности турбоустановки, СЦАР давления пара в концевых уплотнениях ЦВД и ЦНД);
- паропроводы свежего пара (СЦАР предтолчкового прогрева паропроводов и СРК - регулирование скорости прогрева металла трубопроводов свежего пара и СРК турбоустановки);
- сепараторы - пароперегреватели (СЦАР прогрева СПП - регулирование скорости прогрева металла СПП, давления греющего пара на вторую ступень СПП, температуры пара в ресиверах за СПП);
- оборудование БРУ-К (СЦАР давления пара в ГПК - регулирование давления пара в ГПК при пуске и останове энергоблока, программное изменение давление пара в ГПК при разогреве и расхолаживании энергоблока, предотвращение повышения давления пара в ГПК за допустимые пределы при сбросах нагрузки турбины);
- система паропроводов собственных нужд (СЦАР давления пара в КСН и питания ТПН, СЦАР давления пара в деаэраторах турбины);
- тракт основного конденсата (регулирование уровня конденсата в конденсаторах турбины, регулирование уровней конденсата в деаэраторных баках, регулирование давления конденсата на напоре КЭН 2-ой ступени);
- турбопитательные насосы (СЦАР разворота, частоты вращения, производительности и максимального расхода ТПН);
- система питательной воды (СЦАР уровней ПВ в парогенераторах);
- подогреватели высокого давления (СЦАР прогрева и уровней КГП в ПВД);
- подогреватели низкого давления (СЦАР уровней КГП в ПНД-1,3,4);
- конденсатосборники СПП (СЦАР уровней КГП в конденсатосборниках первой и второй ступеней СПП);
- сепаратосборники СПП (СЦАР уровней сепарата в сепаратосборниках СПП).
3.4. Устройства и работа системы автоматического регулирования
Реализация систем регулирования технологическими параметрами в соответствии с данной структурной схемой обеспечивает регулирование «до себя» и «после себя» для статических и астатических объектов регулирования по П-. ПИ-. ПИД- законам управления с учетом охвата исполнительного механизма отрицательной обратной связью.
Структурная схема регуляторов, реализуемых с помощью системы автоматического регулирования турбинного отделения, приведена на структурной схеме, приведенной на рисунке. Схема является унифицированной для всех систем цифрового авторегулирования.
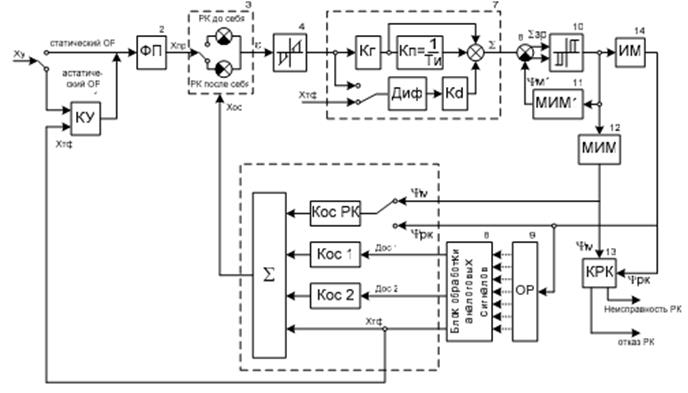
Рис. 3.4.1 – Структурная схема регулятора
На структурной схеме обозначены:
1 - корректор уставки (КУ);
2 - формирователь программы (ФП);
3, 8 - формирователи рассогласования;
4 - формирователь зоны нечувствительности;
5 - формирователь обратной связи;
6 - блок обработки аналоговых сигналов;
7 - формирователь закона регулирования;
9 - объект регулирования;
10 - релейный элемент;
11, 12 - модели исполнительного механизма;
13 - блок контроля регулирующего клапана;
14 - исполнительный механизм
Корректор уставки (1) входит в состав регулятора, воздействующего на
астатический объект, и обеспечивает автоматическую компенсацию статической ошибки регулирования.
Формирователь программы (2) обеспечивает безударное включение
регулятора и осуществляет изменение программного значения до уровня уставки.
В зависимости от способа регулирования («до себя» или «после себя») в блоке (3)
определяется рассогласование между программным значением Хпр и величиной обратной связи регулятора Хос. Положительное рассогласование вызывает формирование положительной П – части, увеличение интегральной составляющей и выдачу команд на открытие регулирующего клапана.
Отрицательное рассогласование вызывает формирование отрицательной П –
части, уменьшение интегральной составляющей и формирование команд на
закрытие регулирующего клапана.
Формирователь зоны нечувствительности (4) блокирует выдачу команд
управления на регулирующий орган при величине рассогласования, не
превышающей величины зоны возврата.
Формирователь обратной связи (5) в зависимости от типа объекта
регулирования обеспечивает формирование сложной обратной связи,
учитывающей величину регулируемого параметра, положение регулирующего
клапана и корректирующие параметры, что дает возможность построить
одноимпульсную, двухимпульсную и трехимпульсную схемы регулирования.
Наличие составляющих в обратной связи определяется ненулевыми
значениями коэффициентов при том или ином параметре, входящим в обратную
связь.
Для астатических объектов с целью повышения устойчивости работы
регулятора в обратную связь вводится сигнал от датчика положения
регулирующего клапана, который в случае его неисправности автоматически
безударно заменяется моделируемым системой значением положения клапана.
Сигналы, поступающие от объекта регулирования (9) и обеспечивающие
формирование обратной связи, могут проходить через блок обработки аналоговых
сигналов (6), обеспечивающий их дополнительную фильтрацию.
Формирователь (7) обеспечивает формирование суммарного управляющего воздействия в соответствии с П-, ПИ-, ПИД- законами регулирования. Выбор закона регулирования осуществляется путем задания ненулевого коэффициентов при той или иной его составляющей. Причем дифференциальная составляющая может формироваться либо по текущему значению регулируемого параметра, либо по величине рассогласования.
Формирователь рассогласования (8), релейный элемент (10), а также модель
исполнительного механизма (11) осуществляют преобразование суммарного управляющего воздействия в импульсную последовательность, поступающую на
исполнительный механизм (14).
Исполнительный механизм включается и перемещается с постоянной
скоростью в сторону ликвидации рассогласования при:
ЗНЗР M > − ∑ 1 ψ
где:
ЗНЗР - значение зоны нечувствительности.
Перемещение исполнительного механизма передается в виде сигнала
обратной связи ψм1, уменьшая результирующий сигнал Σзр=Σ-ψм1,
воздействующий на релейный элемент (10).
При |Σзр| < ЗВЗР, где ЗВЗР - значение зоны возврата, исполнительный
механизм отключается. Таким образом, при каждом изменении суммарного
управляющего воздействия |Σ| > ЗНЗР исполнительный механизм перемещается,
ликвидируя с точностью |Σзр| < ЗВЗР отклонение от заданного значения.
Модели исполнительного механизма (11 и 12) представляют собой
интегральные звенья, на входы которых поступают те же управляющие сигналы,
что и на исполнительный механизм (14). Изменение положения моделей
производится с постоянной скоростью, равной скорости перемещения реального
клапана при наличии команд на его открытие или закрытие. Кроме того, модели
ψм1 и ψм исполнительного механизма (14) учитывают его люфты, возникающие при смене направления выдачи команд.
Модель (11) исполнительного механизма, как указывалось выше, входит в узел формирования серии импульсов на исполнительный механизм (14) и
обеспечивает при нулевом рассогласовании компенсацию интегральной
составляющей закона регулирования. Диапазон изменения выходного сигнала ψм1
модели (11) - от минус 90 до 90 %. При включении регулятора с целью
обеспечения безударности модели (11) и интегральной составляющей закона
регулирования присваивается нулевое значение.
Модель (12) позволяет обеспечить контроль работоспособности
регулирующего клапана путем сравнения сигналов от реального датчика
положения клапана и модели.
Диапазон изменения выходного сигнала ψм модели (12) от 0 до 100 %. При
включении регулятора модели (12) присваивается значение положения
регулирующего клапана.
Блок контроля (13) осуществляет контроль исправности регулирующего
клапана путем сравнения моделируемого положения ψм и показаний реального датчика положения ψРК, а также анализа сигналов от концевых выключателей.
Сигнал «Неисправность РК» формируется в следующих случаях:
1) при расхождении показаний ψм и ψРК на величину больше допустимой;
2) при несоответствии сигналов от концевых выключателей и ψРК;
3) при скачкообразном изменении ψРК на величину больше допустимой.
При отсутствии сигналов от концевых выключателей формируется сигнал
«Отказ РК» (отсутствие питания регулирующего клапана).
Дата добавления: 2015-05-16; просмотров: 3295;