ПРОИЗВОДСТВО РАСЧЕТОВ ДЛЯ РАСХОЖДЕНИЯ С ИСПОЛЬЗОВАНИЕМ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
Ввиду невозможности согласованных действий кораблей (судов) в условиях ограниченной видимости правила расхождения даются в МППСС не в категорической форме, а в виде рекомендаций. В соответствии с Правилом 19 п. судно, обнаружившее с помощью радиолокатора другое судно, должно прежде всего определить, существует ли опасность столкновения. «Если имеются сомнения в отношении наличия опасности столкновения, то следует считать, что она существует» (Правило 7 п. «а»).
Выбор маневра для избежания чрезмерного сближения зависит от ситуации. Маневр может предусматривать изменение курса, скорости, а также того и другого одновременно. Изменение курса и скорости должно быть значительным. Небольшие последовательные изменения курса и скорости создают затруднения в истолковании радиолокационной информации на встречном судне. Под изменением скорости следует понимать ее уменьшение или остановку машин, так как увеличение скорости в условиях ограниченной видимости противоречит Правилам.
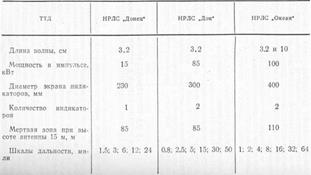
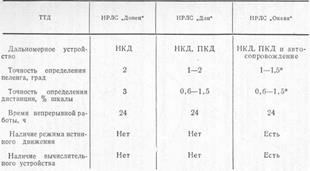
ТАБЛИЦА 18.2. ТАКТИКО-ТЕХНИЧЕСКИЕ ДАННЫЕ НЕКОТОРЫХ НАВИГАЦИОННЫХ РЛС
Маневр только изменением курса является эффективным, если изменение курса производится заблаговременно, когда имеется достаточное водное пространство и когда этот маневр не вызывает чрезмерного сближения с другими судами. Выбор стороны изменения курса предоставляется командиру корабля, однако Правила рекомендуют избегать:
— изменения курса влево при нахождении другого судна впереди траверза, если это судно не является обгоняемым;
— изменения курса в сторону судна, находящегося на траверзе или позади траверза.
Анализ обстановки и определение элементов движения цели (ЭДЦ)
Анализ обстановки с применением маневренного планшета производится следующим образом (рис. 18.1):
— место своего корабля К считают в центре планшета;
— по пеленгам и дистанциям, измеренным радиолокатором через 1—2 мин, наносят на планшет не менее двух мест цели;
— через полученные точки М1, М2, М3 проводят линию относительного движения ЛОД1;
— из центра планшета на ЛОД1 опускают перпендикуляр КС1, длина которого является кратчайшим расстоянием расхождения с целью DKV.
Если DKp больше Dоз, угрозы чрезмерного (опасного) сближения нет. Дальнейших расчетов и маневров не потребуется до тех пор, пока цель не изменит курс или скорость.
Если DKp меньше Dоз, производится определение ЭДЦ:
— из точки К откладывают вектор скорости своего корабля VK;

Рис. 18.1. Анализ обстановки, определение ЭДЦ и расчет маневра расхождения с одиночной целью на маневренном планшете
— из конца вектора VK проводят линию, параллельную ЛОД1 На этой линии откладывают вектор относительной скорости Vр величину которого рассчитывают по формуле
— соединив точку К с концом вектора Vр получают вектор скорости VM;
— время сближения с целью на кратчайшее расстояние
Для анализа обстановки и определения ЭДЦ на маневренном планшете с помощью картосчислительной приставки «Пальма» выполняют следующие действия:
— маневренный планшет кладут на стол и согласовывают масштаб неподвижных кругов дальности (НКД) с окружностями планшета;
— на окружностях планшета надписывают дистанции и выключают НКД;
— проводят линию курса корабля на планшете (считая свой корабль в центре) и совмещают его с отметкой курса изображения;
— закрепляют планшет и наносят на него начальные места наблюдаемых целей;
— через 1—2 мин наносят на планшет не менее двух-трех мест каждой цели;
— проводят линии относительного движения каждой цели.
По расположению ЛОД и величине DKp выявляют цели, с которыми возможно чрезмерное сближение. Дальнейшую обработку информации для расчета ЭДЦ можно производить, как указано выше. Для ускорения получения ЭДЦ молено применять следующий прием:
— планшет с нанесенными местами целей сдвигают назад по курсу на величину пройденного кораблем за время наблюдений расстояния;
— наносят новые отметки целей, сдвигая каждый раз планшет назад по курсу на величину пройденного расстояния;
— соединив прямой места целей, получают направление вектора истинной скорости каждой из них, направленной от предыдущих точек к последующим;
— величину векторов истинной скорости рассчитывают, как обычно, через пройденное расстояние и время наблюдений.
Указанный способ менее точен, чем предыдущий, но позволяет быстрее оценить обстановку при встрече с несколькими судами.
При наличии в РЛС режима истинного движения имеется возможность непосредственно с индикатора получать ЭДЦ и быстро обнаруживать их изменение. Однако на индикаторе, работающем в режиме истинного движения, определение DKp и Tкр затруднено, поэтому для точного определения этих величин необходимо переходить на режим относительного движения.
Определение ЭДЦ на картах крупного масштаба (1:50 000; 1:25 000) производится в сложных в навигационном отношении районах, где расчет маневра расхождения только на планшете может привести к выбору опасного курса. В этом случае штурман имеет возможность вести прокладку за себя и за цель в абсолютном движении без отрыва от навигационной обстановки. В случае применения автопрокладчика появляется возможность иметь текущие координаты своего корабля для ведения прокладки за несколько целей и наглядно наблюдать ситуацию.
Основные недостатки способа: невозможность быстро определить опасность столкновения; кратчайшее расстояние до цели DKp непосредственно из прокладки получить нельзя; на карте можно нанести только точку пересечения истинных курсов. Поэтому одновременно с прокладкой в абсолютном движении анализ обстановки и расчеты на расхождение рекомендуется производить на маневренном планшете посредством приставки «Пальма» с проверкой расхождения на карте.
Расчет и контроль маневра расхождения с одиночной целью на маневренном планшете
При наличии угрозы чрезмерного сближения, т. е. когда Dkp меньше Dоз, необходимо так изменить курс или скорость своего корабля, чтобы ЛОД цели прошла от центра планшета (точки К) на расстоянии больше D03. Для расчета маневра на планшете производят следующие действия (рис. 18.1):
— рассчитывают и наносят на ЛОД1 упрежденную позицию цели Vц; величина М3Мц = Vрtц, где tц=2--4 мин, в зависимости от натренированности оператора;
— из точки Мц проводят касательную к окружности планшета, соответствующей заданному расстоянию D03 и борту расхождения; получают новую линию относительного движения цели ЛОД2;
— строят два новых скоростных треугольника, для чего из конца вектора Vм проводят в обратном направлении линию, параллельную ЛОД2 (на рис. 18.1 показана пунктиром), до пересечения с окружностью планшета, соответствующей VK;
— из полученных двух векторов КК' и КК" выбирают тот, при котором вектор относительной скорости Vp будет больше по абсолютной величине и курс КК" быстрее приведет к расхождению с целью.
Аналогично производится расчет маневра изменением скорости хода. После поворота на рассчитанный курс (изменения скорости хода) наблюдения за целью продолжаются и производится контроль маневра путем нанесения мест цели на планшете. Если места цели ложатся на линию ЛОД2, маневр выполняется правильно. Если места цели М5, М6, М7 ложатся на линию ЛОД3, параллельную ЛОД2, это означает, что поворот начат раньше рассчитанного времени и что расхождение произойдет на расстоянии, большем D03. Изменение направления ЛОД, т. е. смещение мест цели в одну сторону, свидетельствует об изменении ЭДЦ, что потребует новых расчетов.
Особенности использования HPЛC «Океан»
В комплекте РЛС «Океан» имеется вычислительное устройство, позволяющее (после ручного захвата эхо-сигнала цели) определить DKp, Ткр и ЭДЦ. Точность работы вычислителя характеризуется следующими величинами:
— DKp определяется с точностью 2—3 каб;
— Ткр определяется с точностью около 2 мин;
— курс встречного судна определяется с точностью 5—10°, сокорость — от 0,5 до 1 уз.
Расчет, маневра расхождения производится на маневренном планшете, как указано выше. Вычислительное устройство позволяет имитировать выбранный маневр (заранее «проиграть» его) и оценить возможные результаты, при этом ЛОД высвечивается на экране индикатора.
Основные варианты расхождения с одиночной целью приведены в § 23.11.
Расчет на маневренном планшете маневра расхождения с несколькими целями одновременно
Маневр по расхождению с несколькими встречными судами одновременно является наиболее сложным, но необходимость в нем возникает все чаще, особенно в районах оживленного судоходства. Предлагавшиеся до сих пор способы расчета этого маневра основаны на применении специальных палеток, скрывают от оператора физический смысл маневра и поэтому не прививаются на флоте.
Наиболее рациональным является расчет с построением секторов опасных относительных курсов (COOK), предложенный О. Г. Моревым. Расчет маневра предлагаемым способом производится следующим образом (рис. 18.2):
— с обнаружением на экране встречных судов (цели № 1, 2, 3) ведут за каждое из них относительную прокладку на маневренном планшете;
— проведя ЛОДи ЛОД2 и ЛОД3, выявив опасность чрезмерного сближения с одной или несколькими целями, определяют их ЭДЦ (VМ1, VМ2_ и VМ3);
— по цели с максимальной относительной скоростью (сближение с которой на Dкр произойдет раньше) назначают момент ее прихода в упрежденную позицию и наносят на этот момент упрежденные позиции каждой цели 1Mц, 2МЦ, ЗМЦ;
— из упрежденной позиции каждой цели проводят касательные к окружности Dоз, определяя опасный сектор (ОС) каждой цели;
— в конце каждого вектора истинной скорости цели Vм1, Vм2, Vм3 строят сектор опасных относительных курсов;
— для безопасного расхождения со всеми целями одновременно изменяют свой курс или скорость так, чтобы конец своего вектора скорости VK располагался вне пределов COOK.
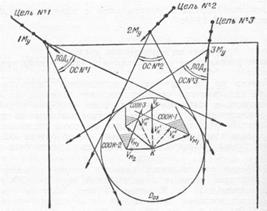
Рис. 18.2. Расчет маневра расхождения с несколькими целями одновременно на маневренном планшете
На рис. 18.2 видно, что уменьшение скорости до величины V'k позволяет разойтись со всеми целями на Dkp больше Doз. Если конец своего вектора скорости Vv будет лежать на границе СООК-1, то расхождение с целью № 1 произойдет на дистанции Doз, а с другими — на большей дистанции. Если конец своего вектора скорости V''к будет находиться в точке пересечения сторон СООК-2 и СООК-3, то расхождение на Doз произойдет с этими двумя целями, а с целью № 1 — на большей дистанции. Рассчитанные варианты расхождения докладываются командиру корабля для выбора и утверждения одного из них. Окончанием маневра расхождения со всеми целями можно считать момент прихода последней из них на относительный траверз.
* В режиме автосопровождения точность определения пеленга и дистанции РЛС «Океан» на расстояниях до 16 миль составляет 0,5—0,7° и 30—40 м соответственно.
Дата добавления: 2015-04-21; просмотров: 1598;