Индуктивные чувствительные элементы
Принцип действия индуктивных чувствительных элементов датчиков основан на изменении тока в обмотке индуктивной катушки или трансформатора в зависимости от магнитного сопротивления сердечника.
На рис.9.7. приведен индуктивный чувствительный элемент, состоящий из обмотки катушки 1, намотанной на неподвижный сердечник 2, продолжением которого является подвижный сердечник 3.
Между неподвижным и подвижным сердечниками имеется зазор 6, который зависит от положения подвижного сердечника 3, связанного с объектом, для которого необходимо измерить перемещение X. На обмотку катушки подается переменное синусоидальное напряжение Ui с частотой f. В сердечнике с магнитным сопротивлением RM циркулирует магнитный поток Ф.
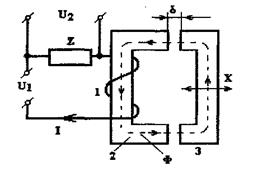
Рисунок 9.7 - Индуктивный чувствительный элемент: 1- обмотка катушки; 2-
неподвижный сердечник; 3- подвижный сердечник; U1- входное переменное
напряжение; U2-выходной сигнал; Z- сопротивление нагрузки.
В цепи обмотки протекает ток, величина которого зависти от зазора <5:

где  постоянная датчика: μ0 - магнитная постоянная;
постоянная датчика: μ0 - магнитная постоянная;
S- площадь сечения сердечника.
Выходной сигнал равен
и2 =ZI = кδФ,
Т.к. магнитный поток также зависит от зазора 5, то зависимость тока от зазора является нелинейной, особенно в начале и в конце зависимости I=f(δ).
Для повышения чувствительности применяют дифференциальное включение двух обмоток в мост. Широко используется трансформаторная схема включения, когда одна из обмоток питается внешним напряжением, а во второй наводится напряжение в зависимости от магнитного сопротивления, т.е. зазора между сердечниками. Индуктивные датчики широко применяются для измерения малых перемещений и вибраций 0,1—0,5 мкм.
9.2.5, Индукционные чувствительные элементы
Индукционные преобразователи подразделяются на два типа: с катушкой, имеющей ферромагнитную деталь, перемещающуюся относительно неподвижной катушки (рис.9.8а) и перемещающуюся (вращающуюся) относительно постоянного магнита (рис. 9.86).
Индукционный датчик с катушкой 1, намотанной на сердечник 2, и перемещающейся ферромагнитной деталью 3 изображен на рис.9.8а. Ферромагнитная деталь 3 механически связана с перемещающейся деталью 4 (вращающимся со скоростью со валом). В этом случае катушка 1 периодически пронизывается переменным магнитным потоком Ф, в результате чего в ней возникнет электродвижущая сила:

где ψ- коэффициент потокосцепления индукционного датчика; t - время.
При вращении вала 4 на выходе катушки возникают импульсы напряжения. Период возникновения импульсов точно соответствует частоте вращения вала f= ω /2π:
Т=1/f=2π/ω.
Частота появления импульсов f равна частоте вращения вала. Для подсчета этой частоты применяют счетчики импульсов.
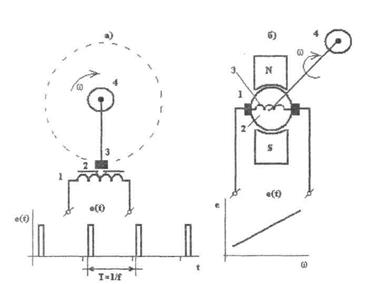
Рисунок 9.8 - Индукционные чувствительные элементы: а - с перемещающейся ферромагнитной деталью;
б - тахогенератор.
К индукционным устройствам относятся тахогенераторы (рис. 12.86), которые представляют собой миниатюрные генераторы с возбуждением от постоянных магнитов или дополнительных обмоток возбуждения.
Магнитное поле создается постоянными магнитами N-S. Якорь 2 тахогенератора содержит катушку 3, вращающуюся от вала 3 со скоростью ω. Выходное напряжение снимается со щеток 1.
Для большинства индукционных преобразователей статическая характеристика является линейной (погрешности составляют 0,5 ... 1,5%) . выходное напряжение пропорционально скорости вращения вала.
Дата добавления: 2015-04-21; просмотров: 1764;