Электропривод в исполнительных устройствах.
Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса.
Современный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %)[источник не указан 307 дней] и главным источником механической энергии в промышленности.
Определение по ГОСТу Р 50369-92 Электропривод – электромеханическая система, состоящая из преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса.
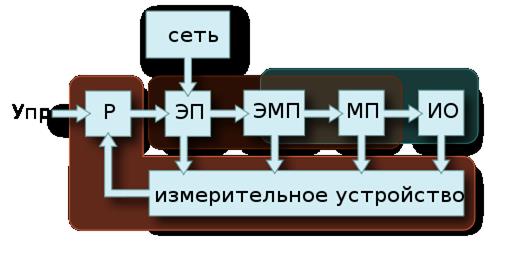
Рисунок 8. К функциональной схеме ЭП
Функциональные элементы (рисунок 8):
· Регулятор (Р) предназначен для управления процессами, протекающими в электроприводе.
· Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
· Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
· Механический преобразователь (МП) может изменять скорость вращения двигателя, а также характер движения (с поступательного на вращательное или с вращательного на поступательное).
· Упр — управляющее воздействие.
· ИО — исполнительный орган.
Исполнительные элементы:
· Силовая часть или электропривод с разомкнутой системой регулирования.
· Механическая часть.
· Система управления электропривода
Электродвигательные ИМ (ЭИМ) получили наибольшее распространение в системах промышленной автоматики. Чаще всего в ЭИМ малой мощности (до 1000 Вт) применяются двухфазные асинхронные двигатели или двигатели постоянного тока, а в более мощных – трехфазные с короткозамкнутым или фазным ротором. Для уменьшения выбега двигателя и улучшения качества регулирования используется электрическое торможение. Конструктивно ЭИМ обычно выполняют с вращательным движением выходного вала и реже – с поступательным перемещением выходного штока.
В зависимости от типа регулирующего органа различают однооборотные, многооборотные, шаговые и постоянно вращающиеся ЭИМ. Однооборотные - с углом поворота выходного вала до 360° применяют обычно в приводе таких регулирующих органов, как заслонки, краны, шибера и т.п. Многооборотные - используют для перемещения регулирующих органов в форме запорных вентилей, дросселей и задвижек. Выходной вал у них может совершать большое число оборотов и одновременно поступательно перемещать регулирующие органы. Шаговые – применяют для преобразования импульсных сигналов управления в фиксированный угол поворота, т.е. на каждый импульс механизм делает строго заданный угловой шаг. У постоянно вращающихся - крутящий момент от вала электродвигателя к регулирующему органу передается обычно через электромагнитную муфту. Направление и скорость вращения выходного вала муфты регулируют, изменяя ток возбуждения муфты.
Основными техническими требованиями, предъявляемыми к ЭИМ, являются:
- статическая устойчивость и линейность механических характеристик во всем диапазоне изменения управления;
- линейная зависимость угловой скорости вращения ротора от величины управляющего сигнала во всем рабочем диапазоне;
- высокое быстродействие по отношению к динамическим параметрам объекта управления;
- большой пусковой момент;
- малая мощность управления при значительной механической мощности на валу электродвигателя;
- отсутствие самохода, т.е. малый остаточный вращающий момент при отсутствии сигнала управления;
- высокая надежность;
- малые габариты, размеры и масса;
- высокие эксплуатационные свойства (КПД, ресурс работы).
К исполнительным двигателям с якорным управлением относятся двигатели с постоянными магнитами. Их статические характеристики аналогичны характеристикам двигателя с электромагнитным возбуждением при якорном управлении. Преимущество двигателей с постоянными магнитами состоит в том, что они не требуют источника питания обмотки возбуждения, имеют больший КПД и быстродействие, магнитный поток практически не зависит от температуры двигателя. Особо высокие показатели по быстродействию у двигателей с полым немагнитным якорем, в который впрессована обмотка управления. К недостаткам двигателей с постоянными магнитами относятся старение магнитов, используемых для полюсов. В настоящее время выпускается большая серия двигателей с постоянными магнитами ДПМ.
Для увеличения быстродействия исполнительных двигателей применяют двигатели постоянного тока с плоским якорем (серия ПЯ), на котором обмотка нанесена печатным способом – рисунок. 9.
Электрическая машина выполняется не с цилиндрическим воздушным зазором, а с плоским. Якорь 1 представляет собой тонкий диск, выполненный из немагнитного материала (текстолита, алюминия), с обеих сторон которого находятся проводники - обмотка 2. Отдельные проводники соединяются друг с другом через сквозные отверстия в диске 3. Электродвигатели с печатной обмоткой мощностью до 200 Вт не имеют специального коллектора. Роль коллектора выполняют активные части проводников, находящихся на одном торце диска. По поверхности торца диска скользят серебряно-графитовые щетки 4. Возбуждение двигателя осуществляется постоянным магнитом с полюсными наконечниками 5, имеющими форму кольцевых сегментов. Иногда оно может осуществляться и электромагнитами. Магнитный поток возбуждения проходит аксиально через два воздушных зазора, немагнитный диск с печатной обмоткой и замыкается по кольцам из магнитомягкой стали 6. При протекании тока по обмотке на валу двигателя создается вращающий момент, расположенный в плоскости диска якоря.
Рисунок 9. Электродвигатель постоянного тока с печатной обмоткой якоря.
Так как секции печатной обмотки одновитковые, а количество секций ограничено размерами диска, то электродвигатели с печатной обмоткой выполняют обычно на низкое напряжение сети. Для увеличения мощности электродвигателя в некоторых конструкциях применяют многодисковое исполнение якоря. Тогда электродвигатель представляет собой совокупность нескольких электрических машин, собранных в одной магнитной системе.
Для обеспечения демпфирования якорь выполняют из немагнитного проводящего материала - алюминия. Вихревые токи в теле якоря образуют тормозной момент, пропорциональный скорости вращения. Между обмоткой и диском устанавливается почти полное потокосцепление, следовательно, индуктивность обмотки практически равна нулю и сопротивление является чисто активным.
Электромеханическая постоянная времени за счет малого момента инерции дискового якоря снижается до 0,01...0,02 с, что является одним из основных преимуществ рассматриваемых двигателей. Кроме того, из-за незначительной индуктивности обмотки якоря коммутация не сопровождается искрением. Проводники печатной обмотки находятся в значительно лучших условиях охлаждения, чем проводники, уложенные в пазы обычного якоря. Это позволяет повысить плотность тока в них и управлять электродвигателем с помощью полупроводниковых усилителей. Механизированное изготовление обмоток якоря удешевляет электродвигатель.
К недостаткам таких электродвигателей по сравнению с обычным двигателем следует отнести более низкий КПД из-за увеличения магнитного зазора машины, ограниченную долговечность вследствие износа контактирующей поверхности проводников обмотки якоря и критичность к перегрузкам по току вследствие ограничения допустимой плотности тока через печатные обмотки, что в ряде случаев ведет к усложнению схемы управления электродвигателями.
Одним из существенных недостатков исполнительных двигателей постоянного тока является наличие скользящего контакта между щетками и коллектором, создающего искрение и радиопомехи. Надежность двигателей относительно низка из-за быстрого износа щеток, особенно при высоких скоростях вращения якоря. Существуют условия эксплуатации, когда коллекторные двигатели постоянного тока неприменимы. С целью устранения названных недостатков щеточно-коллекторный узел двигателя постоянного тока заменяют более надежной полупроводниковой схемой, управляемой сигналами датчика углового положения ротора. Бесколлекторный электродвигатель постоянного тока состоит (рис. 10) из двигателя (Д), полупроводникового коммутатора (К) и датчика углового положения ротора (ДП).
Рисунок 10. Структурная и электрическая схемы бесколлекторного двигателя постоянного тока.
В отличие от коллекторного двигателя постоянного тока бесконтактный двигатель имеет обмотку якоря на статоре I и систему возбуждения с постоянными магнитами на роторе II. Ротор выполняется, как правило, явно полюсным с одной парой полюсов из постоянного магнита. Обмотка состоит из трех секций, соединенных в звезду. И подключенных к транзисторному коммутатору. С осью ротора двигателя жестко связан якорь датчика углового положения III с тремя чувствительными элементами 1, 2, 3, расположенными друг относительно друга под углом 120 электрических градусов. Чувствительные элементы датчика управляют токами баз транзисторов VT1, VT2, VT3 полупроводникового коммутатора IV.
В положении ротора, указанном на схеме, якорь датчика углового положения взаимодействует с чувствительным элементом 1, который поддерживает в открытом состоянии транзистор VT1. Ток, протекающий по статорной обмотке 1, взаимодействует с полем постоянного магнита, в результате чего к ротору прикладывается момент, направленный по часовой стрелке. Под воздействием этого момента ротор двигателя вращается в том же направлении, увлекая за собой якорь датчика. Обмотка 1 подключена к источнику питания U на интервале 120 электрических градусов, совпадающим с угловым размером сектора якоря датчика положения ротора. После поворота на 120 электрических градусов происходит отключение обмотки 1 и подключение обмотки 2, так как якорь датчика углового положения взаимодействует с чувствительным элементом 2, который открывает транзистор VT2 коммутатора. Таким образом, поворот ротора на 120 электрических градусов приводит к скачкообразному перемещению поля статора. Вращение ротора будет продолжаться потому, что происходит последовательное подключение обмоток статора электродвигателя к источнику питания, что обеспечивается благодаря воздействию на коммутатор сигнала обратной связи, снимаемого с датчика углового положения ротора.
Тип обмотки статора электродвигателя и способ ее подключения к источнику электропитания определяют количество переключающих транзисторов коммутатора, а также число чувствительных элементов датчика ДП. Для уменьшения пульсаций момента на валу двигателя за один оборот количество обмоток должно быть большим. Чем больше число обмоток, тем лучше пусковые свойства и равномернее работа машины. Возрастание количества обмоток приводит к увеличению числа чувствительных элементов датчика положения и полупроводникового коммутатора. Поскольку элементы коммутатора имеют меньшую надежность по сравнению с другими частями электродвигателя, а масса и габариты коммутатора соизмеримы с массой и габаритами двигателя, то для электродвигателей небольшой мощности целесообразно применение двух - трех обмоток.
В рассматриваемых двигателях возможна однополупериодная коммутация, при которой ток по обмотке протекает в одном направлении и двухполупериодная коммутация, когда ток по обмотке меняет направление, т.е. обмотка используется в течение полного оборота ротора.
Двигатели с реверсивным питанием имеют преимущество перед аналогичными двигателями с нереверсивным питанием, обусловленное лучшим использованием меди обмоток и активных частей и более высоким КПД. Однако усложнение схемы коммутатора (количество элементов возрастает вдвое и конструкции датчика положения такого двигателя по сравнению с нереверсивным заставляют отдавать ему предпочтение только в тех случаях, когда предъявляются высокие требования к габаритам, массе, величине пульсаций момента и значению КПД двигателя. Для электродвигателей малой мощности более рациональна однополупериодная коммутация.
Обмотка статора бесконтактного электродвигателя может выполняться либо замкнутой, либо разомкнутой. Замкнутая обмотка требует двухполупериодного питания, что усложняет коммутирующее устройство, но улучшает использование материала двигателя. В бесконтактном двигателе постоянного тока можно выделить две цепи, воздействующие на коммутатор. Первая цепь - источник питания транзисторов U, вторая - обратная связь, идущая с датчика положения ротора и воздействующая на базу того или иного транзистора. Отсюда вытекают два способа управления скоростью двигателя: путем изменения напряжения U источника питания и путем воздействия на сигнал обратной связи двигателя.
Реверсирование двигателя может быть осуществлено полупроводниковым коммутатором путем взаимного переключения начала и концов обмоток либо путем переключения чувствительных элементов датчика положения или входных цепей транзисторов.
Таким образом, наряду с основной функцией переключения обмоток по сигналам датчика положения полупроводниковый коммутатор регулирует скорость вращения ротора, осуществляет реверс, пуск и остановку двигателя. Цепи коммутации обмоток статора могут быть выполнены на транзисторных, тиристорных и магнитно-транзисторных ключах.
Одним из основных узлов бесколлекторных двигателей постоянного тока является датчик углового положения ротора. В качестве таких датчиков могут применяться магниторезисторы, датчики Холла, радиоактивные элементы, емкостные, трансформаторные, индуктивные датчики, фоточувствительные устройства.
Датчики положения ротора должны удовлетворять требованиям бесконтактности, высокой надежности, малой массы и габаритов, стабильности выходного сигнала, высокой чувствительности к угловому положению ротора, малому потреблению энергии и хорошему согласованию с входными цепями коммутатора.
Применение бесконтактных коммутаторов обмоток двигателя постоянного тока приводит к более высокой стоимости и большим габаритам по сравнению с коллекторными двигателями той же мощности. Однако возрастание габаритов и стоимости оправдывается увеличением срока службы и надежности бесколлекторных двигателей постоянного тока.
Шаговые исполнительные двигатели. шаговым двигателем называется электродвигатель с прерывистым вращением ротора под действием дискретного электрического сигнала, подаваемого на обмотки управления. в качестве шаговых двигателей получили широкое распространение многофазные синхронные двигатели с активным (возбуждением) и реактивным (невозбужденным) ротором. шаговые двигатели отличаются от обычного синхронного в основном формой напряжения, подводимого к фазным (управляющим) обмоткам. шаговые двигатели применяются с электронным коммутатором, который подает на обмотки управления прямоугольные импульсы. последовательность подключения обмоток и частота импульсов соответствует заданной команде. каждому импульсу управления соответствует поворот ротора на фиксированный угол, называемый шагом двигателя, величина которого строго определена его конструкцией и способом переключения обмоток. скорость вращения пропорциональна частоте, а суммарный угол поворота - числу импульсов управления. при изменении последовательности подключения к обмоткам управляющих импульсов по произвольному закону шаговый двигатель работает в режиме слежения, воспроизводя сложное движение с точность до одного шага. шаговый двигатель совместно с коммутатором можно отнести к системам частотного регулирования синхронного электродвигателя с возможностью изменения частоты до нуля. при снятии управляющих импульсов шаговый двигатель фиксирует конечные координаты углового перемещения с точностью до долей шага без применения датчиков обратной связи, что упрощает систему управления. в сельском хозяйстве эти двигатели им применяются в основном в составе сау технологическими производственными процессами, аналогичным промышленности (например, микроклимат, тепловые процессы и др.).
Дата добавления: 2015-04-10; просмотров: 2662;