СИНХРОННЫЕ ДВИГАТЕЛИ
Так же как и в генераторе, на статоре синхронного двигателя помещается трехфазная обмотка, при включении которой в сеть трехфазного переменного тока будет создано вращающееся магнитное поле, число оборотов в минуту которого N= 60f/p- где р- число пар полюсов статора. F- частота питающей сети.
На роторе двигателя помещена обмотка возбуждения, включаемая в сеть источника постоянного тока. Ток возбуждения создает магнитный поток полюсов. Вращающееся магнитное поле, полученное токами обмотки статора, увлекает за собой полюса ротора. При этом ротор может вращаться только с синхронной скоростью, т. е. со скоростью, равной скорости вращения поля статора. Таким образом, скорость синхронного двигателя строго постоянна, если неизменна частота тока питающей сети.
Так же как и в генераторах, в синхронных двигателях изменение реактивной мощности, т. е. изменение соs j, достигается регулированием тока возбуждения. При некотором токе возбуждения, соответствующем нормальному возбуждению, соsj=1. Уменьшение тока возбуждения вызывает появление отстающего (индуктивного) тока в статоре, а при увеличении тока возбуждения (перевозбужденный двигатель) — опережающего (емкостного) тока в статоре.
Пуск в ход синхронного двигателя непосредственным включением его в сеть невозможен, так как при включении обмотки статора в сеть создается вращающееся магнитное поле, а ротор в момент включения неподвижен, и следовательно, взаимодействия магнитных полей статора и ротора нет, т. е. двигатель не развивает вращающего момента. Поэтому для пуска в ход двигателя необходимо предварительно увеличить число оборотов ротора его до синхронной скорости или близкой к ней.
В настоящее время исключительное применение имеет так называемый асинхронный пуск синхронных двигателей, сущность которого заключается в следующем. В полюсных наконечниках ротора синхронного двигателя укладывается пусковая обмотка, выполненная в виде беличьего колеса, наподобие короткозамкнутой обмотки ротора асинхронной машины.
Обмотка статора двигателя включается в трехфазную сеть, и пуск его производится так же, как и пуск асинхронных двигателей с короткозамкнутым ротором.
После того как двигатель разовьет скорость, близкую к синхронной (примерно 95%), обмотка возбуждения включается в сеть постоянного тока и двигатель входит в синхронизм, т. е. скорость ротора увеличивается до синхронной.
При пуске в ход двигателя обмотка возбуждения замыкается на сопротивление, примерно в 10—12 раз большее сопротивления самой обмотки. Нельзя обмотку возбуждения при пуске в ход оставить разомкнутой или замкнуть накоротко. Если при пуске в ход обмотка возбуждения окажется разомкнутой, то в ней будет индуктироваться очень большая э. д. с, опасная как для изоляции обмотки, так и для обслуживающего персонала. Создание э. д. с. большой величины объясняется тем, что при пуске в ход поле статора вращается с большой скоростью относительно неподвижного ротора и с большой скоростью пересекает проводники обмотки возбуждения, имеющей большое число витков.
Если обмотку возбуждения замкнуть накоротко при пуске в ход, то двигатель при пуске под нагрузкой может развить скорость, близкую к половине синхронной, и войти в синхронизм не сможет.
Работа синхронной машины с потреблением из сети опережающего тока дает возможность использовать ее в качестве компенсатора. Как выше было отмечено, синхронный двигатель для сети может являться конденсатором и повышать соs j всей энергоустановки, компенсируя реактивную мощность других приемников энергии.
Повышение соs j снижает потребление реактивной мощности электроустановок предприятия и уменьшает стоимость электроэнергии.
Компенсатором является синхронный двигатель, работающий без нагрузки и предназначенный для повышения соs j предприятия. Таким образом, компенсатор является генератором реактивной мощности.
Конструктивно компенсатор отличается от синхронного двигателя незначительно. Компенсатор не несет механической нагрузки, поэтому его вал и ротор легче, а воздушный зазор меньше, чем у двигателя.
Основным недостатком синхронных двигателей является потребность в источнике как переменного, так и постоянного тока.
Потребность в источнике постоянного тока для питания обмотки возбуждения синхронного двигателя делает его крайне неэкономичным при небольших мощностях. Поэтому при малых мощностях синхронные двигатели с возбуждением постоянным током не находят применения.
При малых мощностях в случае необходимости получения постоянства скорости вращения (в устройствах автоматики, телемеханики, звукового кино и т. и.) широко используют реактивные синхронные двигатели.
Ротор реактивного синхронного двигателя имеет явно выраженные полюса. При очень малых мощностях ротор делают цилиндрическим из алюминия, в который при отливке закладываются стержни из мягкой стали, выполняющие функцию явно выраженных полюсов (рис. 132). Цилиндрическая форма ротора упрощает его обработку и балансировку, а также снижает потери на трение о воздух при работе машины, что существенно для двигателей очень малых мощностей.
В реактивных синхронных двигателях вращающий момент создается в результате стремления ротора ориентироваться в магнитном поле таким образом, чтобы магнитное сопротивление для этого поля было наименьшим. Поэтому ротор будет всегда занимать такое положение в пространстве, при котором магнитные линии вращающегося магнитного поля статора замкнутся через сталь ротора, так что он будет вращаться вместе с магнитным полем статора.
Наряду с трехфазным широко используют и однофазные реактивные двигатели.
Вращающееся магнитное поле, создаваемое расположенными на статоре обмотками с током, взаимодействует с токами ротора, приводя его во вращение. Наибольшее распространение в настоящее время получил асинхронный двигатель с короткозамкнутым ротором ввиду своей простоты и надежности. В пазах ротора такой машины размещены токонесущие медные или алюминиевые стержни. Концы всех стержней с обоих торцов ротора соединены медными или алюминиевыми же кольцами, которые замыкают стержни накоротко. Отсюда и произошло такое название ротора. В короткозамкнутой обмотке ротора под действием ЭДС, вызываемой вращающимся полем статора, возникают вихревые токи. Взаимодействуя с полем, они вовлекают ротор во вращение со скоростью , принципиально меньшей скорости вращения поля 0. Отсюда название двигателя - асинхронный. Принципиальное отличие синхронного двигателя от асинхронного заключается в исполнении ротора. Последний у синхронного двигателя представляет собой магнит, выполненный (при относительно небольших мощностях) на базе постоянного магнита или на основе электромагнита. Поскольку разноименные полюсы магнитов притягиваются, то вращающееся магнитное поле статора, которое можно интерпретировать как вращающийся магнит, увлекает за собой магнитный ротор, причем их скорости равны. Это объясняет название двигателя – синхронный. Асинхронные двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения. Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, то есть поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.В отличие от асинхронного двигателя частота вращения синхронного двигателя постоянная при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компресоры, вентиляторы) ими легко управлять. Отличить можно по кол-ву оборотав на табличке (если там явно неуказан тип машины), у ассинхронников не круглое число оборотов, 950 об/мин у синхронной машины 1000 об/мин.Одним из главных недостатков синхронных двигателей является сложность их пуска в ход. Пуск синхронных двигателей может быть осуществлен при помощи вспомогательного пускового двигателя или путем асинхронного пуска.Пуск синхронного двигателя при помощи вспомогательного двигателя. Если ротор синхронного двигателя с возбужденными полюсами развернуть другим, вспомогательным двигателем до скорости вращения поля статора, то магнитные полюсы статора, взаимодействуя с полюсами ротора, заставят ротор вращаться далее самостоятельно без посторонней помощи, в такт с полем статора, т. е. синхронно (откуда эти двигатели и получили свое название).
|
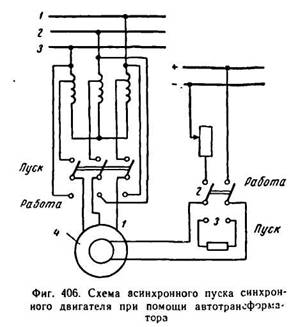
Асинхронный пуск синхронного двигателя. Для осуществления этого способа пуска в полюсных наконечниках полюсов ротора укладывается дополнительная короткозамкнутая обмотка. Так как во время пуска в обмотке возбуждения 1 двигателя наводится большая э. д. с, то по соображениям безопасности она замыкается рубильником 2 на сопротивление 3 (фиг. 406). При включении напряжения трехфазной сети в обмотку статора 4 синхронного двигателя возникает вращающееся магнитное поле, которое, пересекая короткозамкнутую (пусковую) обмотку, заложенную в полюсных наконечниках ротора, индуктирует в ней токи. Эти токи, взаимодействуя с вращающимся полем статора, приведут ротор во вращение. При достижении ротором наибольшего числа оборотов (95—97% синхронной скорости) рубильник 2 переключают так, чтобы обмотку ротора включить в сеть постоянного напряжения. Недостатком асинхронного пуска является большой пусковой ток (в 5—7 раз больший рабочего тока). Пусковой ток вызывает падение напряжения в сети, а это отражается на работе других потребителей. Для уменьшения пускового тока применяют пуск при пониженном напряжении с помощью реактора 2 или автотрансформатора. В настоящее время применяют почти исключительно асинхронный пуск синхронных двигателей ввиду его простоты и надежности.
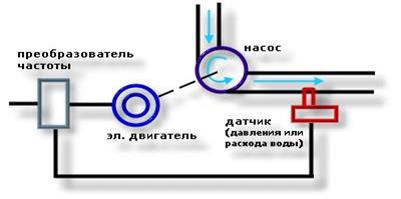
Наиболее простое и эффективное применение - управление насосными агрегатами станций подкачки водопроводных сетей и тепловых распределительных пунктов. Основано это на стабилизации давления холодной или горячей воды на выходе насосной станции. Возможно применение в качестве сигнала обратной связи датчика расхода воды.
При неравномерном суточном, недельном, месячном графике потребления воды поддержание оптимального давления в сетях возможно с помощью перекрытия задвижек на выходе насосной станции (метод дросселирования) или за счёт изменения скорости вращения насосного агрегата (изменение его производительности).
Мощность, потребляемая насосом находится в кубической зависимости от скорости вращения рабочего колеса.
Р = f (Q3) ,
т.е. уменьшение скорости вращения рабочего колеса насоса, вентилятора в 2 раза приводят к уменьшению мощности, потребляемой насосом в 8 раз. Производительность насоса Q прямо пропорциональна скорости вращения рабочего колеса насоса. Исходя из графиков потребления воды и зависимости мощности, потребляемой насосом от производительности можно определить примерную экономию электроэнергии от применения частотно-регулируемого привода.
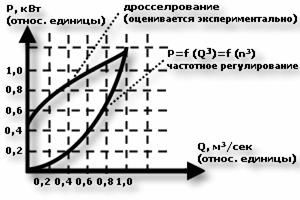

Зная суточный график расхода или потребления воды можно определить суточную экономию электроэнергии при применении частотно-регулируемого привода. Для каждого значения производительности насоса Q это будет разница Р графика потребления мощности. Таким образом видно, что частотнорегулируемый привод эффективнее.
Асинхронные двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения.
Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, то есть поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.
Т.е это достаточно дешевый двигатель/, который применяется везде, синхронную машину найти крайне тяжело.
В отличие от асинхронного двигателя частота вращения синхронного двигателя
постоянная при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компресоры, вентиляторы) ими легко управлять.
Отличить можно по кол-ву оборотав на табличке (если там явно неуказан тип машины), у ассинхронников не круглое число оборотов, 950 об/мин у синхронной машины 1000 об/мин.
Синхронный электродвигатель.
Синхронной называется электрическая машина, скорость вращения n (об/мин) которой связана постоянным отношением с частотой n = 60 * f / p (где р — число пар полюсов машины) сети переменного тока, в которую эта машина включена. Синхронный машины служат генераторами переменного тока; синхронные электродвигателя применяются во всех тех случаях, когда нужен двигатель, работающий при постоянной скорости; для получения регулируемого реактивного тока устанавливают синхронные компенсаторы.
Синхронный электродвигатель – синхронная машина, работающая в режиме двигателя.
Синхронные электродвигатели в настоящее время широко применяются для самых различных видов привода, работающего с постоянно скоростью: для крупных вентиляторов, эксгаустеров, компрессоров, насосов, генераторов постоянного тока и т.д. В большинстве случаев эти двигатели выполняются явнополюсными, мощностью 40 – 7500 кВт, для скоростей вращения 125 – 1000 об/мин. Двигатели отличаются от генераторов конструктивно наличием на роторе необходимой для асинхронного пуска дополнительной короткозамкнутой обмотки или аналогичного приспособления, а также относительно меньшим возушным зазором между статором и ротором. У синхронных двигателей к.п.д. несколько выше, а масса на единицу мощности меньше, чем у асинхронных двигателей, рассчитанных на ту же скорость вращения.
Самый простой и распространенный пуск синхронного двигателя – асинхронный пуск. Пуск двигателя состоит из двух этапов: первый этап – асинхронный набор скорости при отсутствии возбуждения постоянным током и второй этап – втягивание ротора в синхронизм после включения постоянного тока возбуждения.
Характерной и ценной особенностью синхронного двигателя по сравнению с асинхронным является возможность регулирования его реактивного тока (а следовательно, и cosφ) путем изменения постоянного тока возбуждения. При нормальном токе возбуждения магнитное поле ротора индуктирует в обмотке статора э.д.с., которую можно считать приближенно равной напряжению сети, приложенному к зажимам статора. В этих условиях работающий синхронный двигатель нагружает сеть только активным током. Его cos φ = 1. По этой причине обмотка статора синхронного двигателя рассчитывается на один активный ток (у асинхронного двигателя эта обмотка рассчитывается на активный и реактивный токи). По этой причине при одинаковой номинальной мощности габариты синхронного двигателя меньше, а его к.п.д. выше, чем асинхронного.
Если же ток возбуждения синхронного двигателя существенно меньше номинального, то магнитный поток ротора индуктирует в обмотке статора э.д.с., меньшую, чем напряжение сети – это условие, когда двигатель недовозбужден. Помимо активного тока, он нагружает сеть реактивным током, отстающим по фазе от напряжения на четверть периода, как намагничивающий ток асинхронного электродвигателя. Но если постоянный ток возбуждения больше номинального, то э.д.с. больше напряжения сети – двигатель перевозбужден. Он нагружает сеть, кроме активного тока, реактивным током, опережающим по фазе напряжение сети, совершенно также как емкостной ток конденсатора. Следовательно, перевозбужденный синхронный двигатель может подобно емкости улучшать общий cosφ промышленного предприятия, снижаемый индуктивными токами асинхронных двигателей.
Дата добавления: 2015-04-10; просмотров: 3953;