Принцип действия ВЗД
Винтовые двигатели относятся к объемным роторным гидравлическим машинам.
Согласно общей теории винтовых роторных гидравлических машин элементами рабочих органов (РО) являются:
1) статор двигателя с полостями, примыкающими по концам к камерам высокого и низкого давления;
2) ротор-винт, носящий название ведущего, через который крутящий момент передается исполнительному механизму;
3) замыкатели-винты, носящие название ведомых, назначение которых уплотнять двигатель, т.е. препятствовать перетеканию жидкости из камеры высокого давления в камеру низкого давления.
|
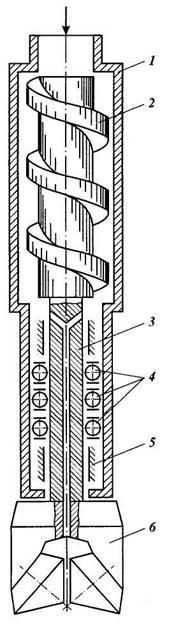
Рис. 16.1. Упрощенная схема винтового двигателя:
1 - корпус; 2 - ротор; 3 - вал; 4, 5 - осевой и радиальный подшипники; 6 - долото
В одновинтовых гидромашинах используются механизмы, в которых замыкатель образуется лишь двумя деталями, находящимися в постоянном взаимодействии, - статором и ротором.
При циркуляции жидкости через РО в результате действия перепада давления на роторе двигателя создается крутящий момент, причем винтовые поверхности РО, взаимно замыкаясь, разобщают области высокого и низкого давления. Следовательно, по принципу действия винтовые двигатели аналогично поршневым, у которых имеется винтообразный поршень, непрерывно перемещающийся в цилиндре вдоль оси двигателя.
Для создания в РО двигателя полостей, теоретически разобщенных от областей высокого и низкого давления (шлюзов), необходимо и достаточно выполнение четырех условий (рис. 16.2):
1) число зубьев zlнаружного элемента (статора) должно быть на единицу больше числа зубьев z2 внутреннего элемента (ротора):
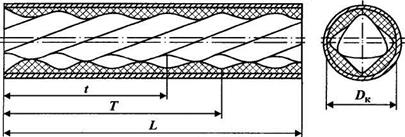
Рис. 16.2. Рабочие органы ВЗД на продольном и поперечном разрезах
z1 = z2 + 1;
2) отношение шагов винтовых поверхностей наружного элемента (статора) Ти внутреннего элемента (ротора) tдолжно быть пропорционально отношению числа зубьев:
T/t =z/z2;
3) длина рабочего органа L должна быть не менее шага винтовой поверхности наружного элемента: L ≥ Т;
4) профили зубьев наружного и внутреннего элементов должны быть взаимоогибаемы и находиться в непрерывном контакте между собой в любой фазе движения.
Отличительным параметром ВЗД, во многом определяющим его выходные характеристики, является отношение чисел зубьев рабочих органов, называемое кинематическим отношением i:
i = z2 : z1.
Кратность действия, зависящая от кинематического отношения РО, равна числу заходов внутреннего элемента zи определяет рабочий объем ВЗД:
V = z2 ST,
где S - площадь живого сечения РО.
Кратность действия является основным параметром ВЗД, что наглядно иллюстрируется теоретическими кривыми (рис. 16.3), полученными во ВНИИБТ в 1972 г. и в дальнейшем повсеместно используемыми при обоснований выбора рабочего органа ВЗД.
Отечественные ВЗД имеют многозаходные РО. Зарубежные компании производят двигатели, как с однозаходным ротором, так и с многозаходными РО.

Рис. 16.3. Зависимость момента и частоты вращения ВЗД от кинематического отношения рабочих элементов
Дата добавления: 2015-06-27; просмотров: 2394;