Лекция 15. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПРОЦЕССОМ БУРЕНИЯ
Автоматическое управление каким–либо процессом чаще всего сводится к стабилизации (либо ограничению) некоторого параметра этого процесса.
Рассмотрим регулирование процесса бурения по принципу стабилизации осевой нагрузки. Вначале представим себе, как происходит стабилизация осевой нагрузки при отсутствии автоматики. Сделаем это на примере вышерассмотренного управления осевой нагрузкой при бурении с разгрузкой станками с гидравлической подачей (рис. 6.2). Бурильщик стоит у станка и держит руку на рукоятке дросселя 14, смотря при этом на стрелку прибора управления осевой нагрузкой, установлен ной в положение 19. Цель бурильщика – не дать осевой нагрузке отклониться от значения, указанного стрелкой.
На осевую нагрузку могут оказывать влияние геологические либо технические условия ведения процесса бурения. Если, например, по какой-то причине в питающей сети насоса 10 упадет напряжение, то его подача уменьшится, что приведет к уменьшению создаваемого дросселем 12 перепада давления  . Уменьшенное давление через переключатель 15 передастся рабочей жидкости под поршнем 7, вызвав уменьшение разгружающего усилия
. Уменьшенное давление через переключатель 15 передастся рабочей жидкости под поршнем 7, вызвав уменьшение разгружающего усилия  (в формуле (6.1) – со знаком минус). В итоге осевая нагрузка
(в формуле (6.1) – со знаком минус). В итоге осевая нагрузка  самопроизвольно возрастет, и стрелка на приборе уйдет от положения 19 вниз. Чтобы вернуть стрелку в ее прежнее положение, бурильщик будет медленно вращать рукоятку 14 иглы 13 вправо. Игла по резьбе двинется вниз, уменьшая отверстие дросселя 12. От этого перепад давления начнет возрастать и с ним – усилие . Стрелка прибора пойдет назад
самопроизвольно возрастет, и стрелка на приборе уйдет от положения 19 вниз. Чтобы вернуть стрелку в ее прежнее положение, бурильщик будет медленно вращать рукоятку 14 иглы 13 вправо. Игла по резьбе двинется вниз, уменьшая отверстие дросселя 12. От этого перепад давления начнет возрастать и с ним – усилие . Стрелка прибора пойдет назад
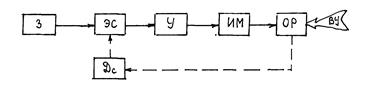
Рис. 15.1 Автоматический стабилизатор осевой нагрузки
 – задатчик;
– задатчик;  – элемент сравнения;
– элемент сравнения;  – усилитель;
– усилитель;  – исполнительный механизм;
– исполнительный механизм;  – объект регулирования;
– объект регулирования;  –внешние условия;
–внешние условия;  – датчик осевой нагрузки.
– датчик осевой нагрузки.
и, как только достигнет исходного положения, бурильщик перестанет вращать рукоятку 14.
Если же нагрузка уменьшится, (стрелка отклонится вверх), то бурильщик начнет вращать рукоятку дросселя в обратном направлении, опять возвращая стрелку на место.
Автоматический стабилизатор осевой нагрузки (рис 15.1) работает сходным образом Задатчик вырабатывает напряжение  , соответствующее той осевой нагрузке, которую следует поддерживать постоянной. Пусть, например, требуется осевая нагрузка = 10 кН и в данной системе это кодируется напряжением =10 В. Для установления желаемого значения С на пульте прибора имеется рукоятка регулирования . Напряжение задания поступает на элемент сравнения , куда также подается в противофазе напряжение датчика осевой нагрузки
, соответствующее той осевой нагрузке, которую следует поддерживать постоянной. Пусть, например, требуется осевая нагрузка = 10 кН и в данной системе это кодируется напряжением =10 В. Для установления желаемого значения С на пульте прибора имеется рукоятка регулирования . Напряжение задания поступает на элемент сравнения , куда также подается в противофазе напряжение датчика осевой нагрузки  . Если осевая нагрузка в данный момент именно такова, как это устанавливает задание (10 кН) то на элементе сравнения два напряжения взаимно уничтожаются, так что на выходе элемента сравнения (после него) напряжение равно нулю.
. Если осевая нагрузка в данный момент именно такова, как это устанавливает задание (10 кН) то на элементе сравнения два напряжения взаимно уничтожаются, так что на выходе элемента сравнения (после него) напряжение равно нулю.
Если из-за изменения внешних условий осевая нагрузка самопроизвольно изменится, то на выходе элемента сравнения появится напряжение разности (так называемое “рассогласование”)  . (15.1)
. (15.1)
Пусть в нашем примере осевая нагрузка увеличилась до 12 кН, что соответствует =12 В. Т. к. =10 В, то на выходе элемента сравнения появляется рассогласование  = -2 В.
= -2 В.
это напряжение поступит на усилитель , который необходим, чтобы мощности сигнала рассогласования было достаточно для управления исполнительным механизмом .
Исполнительный механизм в данном случае представляет собой тот же дроссель 12 (на рис. 6.2) с иглой 13, чья рукоятка 14 поворачивается теперь уже не бурильщиком, а небольшим тихоходным реверсивным двигателем. Этот двигатель имеет управляющую обмотку, на которую и поступает рассогласование. Двигатель установлен таким образом, что если управляющее напряжение рассогласования имеет знак минус, то он (как и при ручном управлении) вращается вправо, в сторону движения иглы 13 вниз и повышения перепада давления . Если же рассогласование положительно, то двигатель вращается в противоположном направлении, уменьшая перепад давления.
В нашем примере отрицательно (фактическая нагрузка больше заданной), поэтому двигатель вращается вправо, повышая и в гидроцилиндрах станка, и, таким образом уменьшая осевую нагрузку , которая и является объектом регулирования .
Соответственно будет уменьшаться и напряжение датчика , и как только оно достигнет по абсолютному значению  (10 В), рассогласование – согласно формуле (15.1) – сравняется с нулем. Управляющая обмотка двигателя обесточится, он остановится, и осевая нагрузка вернется к заданному значению (10 кН).
(10 В), рассогласование – согласно формуле (15.1) – сравняется с нулем. Управляющая обмотка двигателя обесточится, он остановится, и осевая нагрузка вернется к заданному значению (10 кН).
Допустим теперь, что внешние условия изменились так, что осевая нагрузка упала до 7 кН (напряжение датчика станет = 7 В). Это вызовет рассогласование = + 3 В.
Так как знак рассогласования теперь стал положительным, то появление этого напряжения на управляющей обмотке двигателя исполнительного механизма заставит двигатель вращать рукоятку 14 влево, т. е. – в сторону повышения осевой нагрузки. Рассогласование начнет уменьшаться и в конце концов двигатель остановится, когда осевая нагрузка снова вернется к заданному значению. Так работает стабилизатор осевой нагрузки.
Сходным образом действуют и стабилизаторы любого другого параметра. Разница будет состоять в том, что вместо датчика осевой нагрузки схема автомата будет включать датчик иного параметра, который следует стабилизировать.
Уяснение схемы на рис 15.1 требует введения некоторых терминов, используемых при автоматическом регулировании. Прежде всего это критерий регулирования,– термин который показывает, какой из параметров технологического процесса подвергается стабилизации. В рассмотренном случае это осевая нагрузка . Критерий регулирования описывается выражением  , (15.2)
, (15.2)
где  – заданная осевая нагрузка
– заданная осевая нагрузка
Сплошные линии со стрелками указывающими вправо – от задатчика до объекта регулирования – обозначают так называемую “прямую связь” в управляющем автомате. Соответственно пунктирная линия (от объекта регулирования через датчик к элементу сравнения) обозначает обратную связь. Автоматическая стабилизация какого-либо параметра процесса осуществляется путем создания “отрицательной обратной связи”. Отрицательной, называется такая обратная связь, знак сигнала которой противоположен знаку сигнала задатчика. При этом появившееся рассогласование используется для сведения самого себя к нулю (как это и продемонстрировано в приведенном примере).
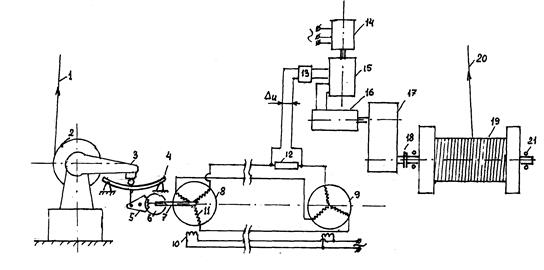
Рис. 15.2. Стабилизатор подачи долота РПДЭ
1 – мертвый конец; 2 – приспособление для закрепления каната; 3 – нажимное устройство; 4 – рессорная пружина; 5 – зубчатый сектор; 6 – шестерня; 7 – вал; 8 – сельсин-датчик; 9 – сельсин-приемник; 10 – статор сельсина; 11 – ротор сельсина; 12 – элемент сравнения; 13 – усилитель; 14 – асинхронный электродвигатель; 15 – генератор постоянного тока; 16 – двигатель постоянного тока; 17 – редуктор; 18 – муфта сцепления; 19 – барабан лебедки; 20 – ведущий конец талевой оснастки; 21 – подшипник вала лебедки.
Стабилизация осевой нагрузки представляет собой актуальную проблему особенно при роторном бурении с подачей с лебедки (как на рис. 6.1). Дело в том, что коэффициент трения между тормозной лентой и поверхностью тормозного шкива может изменяться в широких пределах. Например, на поверхность шкива может попасть смазка, и тогда коэффициент трения в этом месте уменьшится и осевая нагрузка существенно возрастет (до 20 – 30 %). Если же попадет грязь или песок, то осевая нагрузка столь же резко уменьшится.
Нестабильность осевой нагрузки приводит к преждевременному прекращению рейса из-за выхода из строя долота (вследствие поломок зубьев или разрушения подшипников). На рис.15.2 приведена схема стабилизатора осевой нагрузки для роторного бурения РПДЭ (электрический регулятор подачи долота). Мертвый конец талевой оснастки 1 закреплен на барабане 2. Поворачивающийся вместе с барабаном вал оснащен нажимным устройством 3, оказывающим давление на рессорную пружину 4. Натяжение мертвого конца, а значит сила давления нажимного устройства на пружину (чувствительный элемент) и прогиб последней пропорциональны разгружающему усилию (формула (6.1).
Прогиб пружины с помощью связующего звена передается на зубчатый сектор 5, который вращает шестерню 6 и вместе с ней вал 7 и ротор 11 сельсина-датчика, который таким образом выполняет роль датчика осевой нагрузки.
В системе автоматической стабилизации разгружающего усилия (а значит, и осевой нагрузки) ротор сельсина-приемника является задатчиком. Бурильщик устанавливает его относительно статора в нужное положение (на рукоятке задаваемых значений имеются деления). Сельсин-датчик и сельсин-приемник соединены кабелем.
Как указывалось, если роторы обоих сельсинов занимают относительно своих статоров одинаковое положение (что в рассматриваемом случае означает, что фактическая осевая нагрузка равна заданной), то ток в соединяющих роторы проводах отсутствует.
Если же фактическая осевая нагрузка от заданной отличается, то между роторами образуется угол смещения и напряжение рассогласования (с положительным или отрицательным знаком), которое по абсолютной величине пропорционально углу смещения.
Напряжение рассогласования снимается с элемента 12, усиливается на усилителе 13 и подается на управляющую обмотку генератора постоянного тока 15. Генератор вращается от асинхронного электродвигателя переменного тока 14 (или от дизеля) и обеспечивает питание двигателя постоянного тока 16. Последний через редуктор 17 (понижающий частоту вращения в 100 раз) и муфту 18 передает вращение на барабан лебедки 19.
Генератор, двигатель, редуктор и лебедка вместе представляют собой исполнительный механизм. Если фактическая осевая нагрузка оказывается больше заданной, то это значит, что разгружающее усилие недостаточно. Рассогласование (формула 15.1) будет иметь знак минус и генератор заставит двигатель 16 вращать барабан лебедки в сторону натяжения каната, пока усилие разгрузки, а значит и осевая нагрузка, не вернутся к заданному значению. Если осевая нагрузка вследствие внешних возмущений уменьшится, то рассогласование получит знак плюс. Автомат сработает в противоположном направлении и опять вернет осевую нагрузку к заданному значению.
Рассмотренный автомат комплектует буровые установки Уралмаш 125Э и БУ-80БрЭ. Минимальное рассогласование заданного усилия с фактическим, которое приводит авторегулятор в действие (порог чувствительности) составляет 20 кН.
Вместо осевой нагрузки автомат РПДЭ может стабилизировать скорость бурения. В этом случае сельсин–датчик подключается не к датчику нагрузки (элементы 3, 4, 5, 6, на рис. 15.2), а к датчику скорости (элементы 2, 3, 4, 5 на рис. 11.2) при том же исполнительном механизме. Стабилизация скорости (удерживание ее у заданного значения) осуществляется путем регулирования скорости разматывания барабана лебедки.
Данная функция автомата оказалась полезной при проработка ствола скважины, с целью его калибровки, например перед спуском обсадной колонны. При этом существует некоторая оптимальная скорость подачи, которую и следует задавать. Слишком маленькая скорость проработки ствола ведет к напрасным потерям времени, слишком большая – не обеспечивает качество проработки (долото двигается по винтовой линии с широким шагом и оставляет непроработанные участки)
Если автомат стабилизирует какой-либо из параметров управляющего воздействия (см. лекцию 4), то такой автомат называется собственно стабилизатором (кроме рассмотренного стабилизатора осевой нагрузки, существуют также стабилизаторы подачи жидкости насосом и – в специальных случаях – стабилизаторы частоты вращения). Если же стабилизации подвергаются параметры – показатели интенсивности и безаварийности (механическая скорость, крутящий момент и давление жидкости), т. е. выполняется более сложная задача, то такие автоматы носят название автоматических регуляторов.
Предлагались автоматические регуляторы процесса бурения, основанные на стабилизации механической скорости, как критерия регулирования – см. вышеописанный вариант РПДЭ.
 . (15.3)
. (15.3)
Формально такой автомат вписывается в схему, данную на рис. 15.1. Следует лишь заменить датчик осевой нагрузки на датчик скорости.
С помощью задатчика бурильщик в виде некоторого напряжения задает желаемую механическую скорость  . Это напряжение на элементе сравнения сравнивается с напряжением датчика скорости и в случае появления рассогласования оно, после усиления поступает на исполнительный механизм .
. Это напряжение на элементе сравнения сравнивается с напряжением датчика скорости и в случае появления рассогласования оно, после усиления поступает на исполнительный механизм .
Последний не отличается от исполнительного механизма стабилизатора осевой нагрузки (например рассмотренный выше исполнительный механизм для станков с гидравлической подачей) Если механическая скорость меньше заданной, то реверсивный двигатель вращает рукоятку 14 дросселя 12 (рис. 6.2) в сторону увеличения осевой нагрузки. Рост нагрузки приводит к росту внедрения резцов ПРИ, а это сопровождается увеличением механической скорости. Осевая нагрузка будет повышаться исполнительным механизмом до тех пор, пока скорость бурения не вернется к заданному значению . В этот момент рассогласование станет равным нулю и двигатель дросселя обесточится. При увеличении скорости система сработает в обратном направлении и опять вернется к .
Применение подобных автоматов столкнулось с серьезными проблемами. На самопроизвольное изменение механической скорости в первую очередь влияет смена буримых пород (а также затупление резцов, самозаклинка керна в колонковой трубе и т. п).
Рассмотрим случай, когда изначально бурение с использованием авторегулятора скорости велось, в мягких породах, и задатчик авторегулятора был настроен на высокую механическую скорость (например 20 м/ч). Пусть в какой-то момент рейса мягкие осадочные породы подошли к концу и ПРИ врезался в крепкие породы, например X категории буримости. Скорость бурения в этих условиях резко снижается (например до 2 м/ч), на элементе сравнения появляется значительное рассогласование и реверсивный двигатель начинает повышать осевую нагрузку. Скорость бурения начинает расти (например до 2.5, 3 м/ч) но вернуться к 20 м/ч в этих условиях она не может из-за слишком большой крепости пород. И тогда исполнительный механизм будет повышать осевую нагрузку бесконечно, до тех пор, пока не произойдет поломка бурильных труб либо долота.
Именно по этой причине входящий в состав автомата РПДЭ автоматический стабилизатор механической скорости, применяется не при бурении, как таковом (углубке скважины) а при вспомогательных работах – проработке ствола или его расширении, т. е. процессах, ведущихся при очень низких осевых нагрузках, когда угроза их чрезмерного увеличения исполнительным механизмом практически отсутствует.
Чтобы сохранить возможность использовать скорость бурения для интенсификации процесса углубки и при этом устранить опасность аварий, был предложен более сложный, чем вышерассмотренные, критерии регулирования (рис. 15.3)
 (15.4)
(15.4)
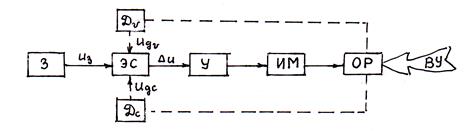
Рис. 15. 3 Автоматический регулятор, работающий с учетом как скорости бурения, так и осевой нагрузки (по критерию (15.4))
Как и в предшествующих случаях, этот критерий осуществляется в терминах напряжения
 , (15.5)
, (15.5)
что означает, что на элементе сравнения сумма напряжений, вырабатываемых датчиками скорости и осевой нагрузки уравновешивается некоторым заданным напряжением. Пусть, например в момент пуска автомата в работу скорость равнялась 10 м/ч (при сигнале датчика скорости  =10 В). Обеспечивающая такую скорость нагрузка, равнялась 10 т (
=10 В). Обеспечивающая такую скорость нагрузка, равнялась 10 т (  = 10 В), и сигнал задания составлял
= 10 В), и сигнал задания составлял  20 В. Таким образом рассогласование было = 0 .
20 В. Таким образом рассогласование было = 0 .
Проанализируем на этом примере работу принятого критерия регулирования. Сначала рассмотрим крайние случаи.
– Встретилась чрезвычайно твердая порода, так что скорость бурения упала до нуля. В этом случае рассогласование заставит управляющий осевой нагрузкой двигатель, вращаться в сторону повышения скорости (т. е. увеличивать нагрузку). Однако порода оказалась (теоретически) настолько твердой, что несмотря на рост нагрузки скорость остается равной нулю. До каких пор будет расти нагрузка? Подставив в выражение (15.5) = 0 , получим, что нагрузка будет расти не бесконечно (как при критерии  ), а до момента, когда = , т.е. когда напряжение датчика, возрастая, достигнет в нашем примере 20 В, а сама нагрузка – 20 т. Двигатель остановится и аварии из-за перегрузки не случится.
), а до момента, когда = , т.е. когда напряжение датчика, возрастая, достигнет в нашем примере 20 В, а сама нагрузка – 20 т. Двигатель остановится и аварии из-за перегрузки не случится.
– Встретилась чрезвычайно мягкая порода когда скорость бурения очень велика даже при отсутствии осевой нагрузки (точнее, при очень малой нагрузке – как бывает например в песках). Достигнет ли скорость опасной величины? (при которой шлам не будет успевать удаляться). Теоретически при = 0 скорость может возрасти лишь до момента когда = , т. е. не более, чем до 20 м/ч, что зашламование вызвать не должно
В отличие от рассмотренных выше предельных случаев в обычных условиях рост и падение скорости связаны с ростом и падением нагрузки.
– Встретилась более крепкая чем в исходных условиях порода, скорость бурения упала вдвое, так что соответствующее напряжение стало = 5 В . При первоначальной осевой нагрузке 10 т (10 В) в уравнении (15.5) справа имеем 20 В, а слева теперь только 15 В, и ,следовательно, появляется рассогласование + 5 В, вызывающее вращение дросселя в сторону повышения нагрузки. Так как при этом будет возрастать и скорость, то двигатель может остановиться, например, при = 13 В ( =13 т) и = 7 В (  = 7 м/ч), т. е. когда сумма напряжений датчиков скорости и нагрузки снова возвратилась к =20 В. В итоге регулятор скорость поднял, но не до исходного значения
= 7 м/ч), т. е. когда сумма напряжений датчиков скорости и нагрузки снова возвратилась к =20 В. В итоге регулятор скорость поднял, но не до исходного значения
– Встретилась более мягкая порода так, что стало = 15В. Рассогласование стало уменьшать нагрузку и скорость и через некоторое время равновесие правой и левой частей формулы 15.5 опять восстановилось, например при = 12 В и = 8 В.
Следует подчеркнуть, что приведенные исходные соотношения (10+10=20 – в том порядке как соответствующие величины записаны в формуле (15.5)) условны и предельно упрощены ради ясности изложения. Однако в них подчеркивается тот факт, что в исходном положении вклады сигналов нагрузки и скорости в общий баланс должны быть равноправны, т. е. примерно одинаковы.
Автоматическое управление бурением по критерию (15.4) осуществлено в регуляторах БР-1 (для гидравлической подачи) и АРП (для подачи с лебедки).
В первом из них схема на рис 6.2 дополнена электрическими датчиками скорости бурения и осевой нагрузки (рис. 11.1 и 5.6), задатчиком, элементом сравнения, усилителем и реверсивным двигателем управления дросселем.
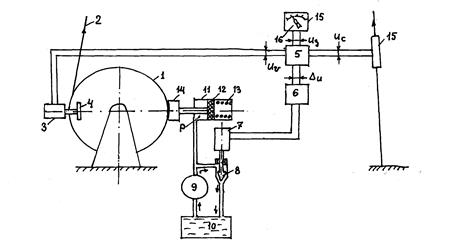
Рис. 15.4. Автоматический регулятор процесса роторного бурения
1 – тормозной шкив лебедки; 2 – ведущая ветвь талевой оснастки; 3 – датчик скорости бурения; 4 – приводной шкив датчика скорости; 5 – элемент сравнения; 6 – усилитель; 7 – реверсивный электродвигатель; 8 – дроссель; 9 – маслонасос; 10 – маслобак; 11 – гидроцилиндр; 12 – поршень; 13 – пружина; 14 – тормозная колодка; 15 – датчик осевой нагрузки; 16 – задатчик;  сигнал датчика скорости;
сигнал датчика скорости;  – сигнал датчика осевой нагрузки; – сигнал задатчика; – рассогласование; – давление жидкости
– сигнал датчика осевой нагрузки; – сигнал задатчика; – рассогласование; – давление жидкости
Схема авторегулятора для подачи с лебедки представлена на рис. 15.4. В качестве датчика скорости бурения 3 использован тахогенератор. Он приводится обрезиненным фрикционным шкивом 4, прижимаемым к боковой поверхности тормозного шкива лебедки при ее разматывании в ходе бурения.. В качестве датчика осевой нагрузки использован датчик прибора МКН (рис. 7.2).
Сигналы датчиков скорости и осевой нагрузки складываются на элементе сравнения 5, куда в противофазе сигналам датчиков поступает также сигнал задатчика .
Допустим из-за перехода в более крепкие породы скорость бурения упала и равновесие (15.5) нарушилось. Появилось рассогласование , которое после усилителя 6 попадает на управляющую обмотку электродвигателя 7. Электродвигатель будет вращаться в сторону закрытия дросселя 8 и повышения на нем перепада давления масла, (качаемого через этот дроссель насосом 9 в бак 10). Повышенное давление через трубопровод попадет под поршень 12 гидроцилиндра 11 и , преодолевая сопротивление пружины 13, ослабит нажим тормозной колодки 14 на поверхность тормозного барабана. Сила трения между колодкой и барабаном уменьшится, и скорость сматывания каната возрастет, вызывая рост нагрузки.
Рост осевой нагрузки (и соответственно скорости бурения) будет продолжаться, до тех пор, пока сумма сигналов скорости и нагрузки опять не сравняется с сигналом задания. Таким образом скорость бурения по более крепкой породе окажется больше, чем в момент входа в нее ПРИ, но так и не достигнет значения, имевшего место при бурении в предшествующей, более мягкой породе.
Если же новая порода окажется мягче предшествующей, то скорость бурения возрастет и на выходе элемента сравнения появится рассогласование, знак которого будет противоположным, тому, который был при встрече более твердой породы. Двигатель 7 начнет уменьшать давление , и пружина 13 усилит нажим колодки 14 на тормозной шкив лебедки. В итоге скорость разматывания лебедки уменьшится и осевая нагрузка (вместе со скоростью бурения) начнет уменьшаться до момента восстановления равенства их сигналов с сигналом задатчика.
Рекомендуемая литература: 4 с. 182-185, 194-197
Контрольные вопросы
1. Как работает автоматический стабилизатор ?
2. Как устроен и работает стабилизатор нагрузки РПДЭ?
3. Как регулируют процесс бурения по механической скорости?
4 Как устроены и работают авторегуляторы БР1 и АРП?
Планы практических занятий
Дата добавления: 2015-06-27; просмотров: 2162;