Active suspension system
Feed-forward is a term describing an element or pathway within a control system which passes a controlling signal from a source in the control system's external environment, often a command signal from an external operator, to a load elsewhere in its external environment. A control system which has only feed-forward behavior responds to its control signal in a pre-defined way without responding to how the load reacts
Some prerequisites are needed for control scheme to be reliable by pure feed-forward without feedback: the external command or controlling signal must be available, and the effect of the output of the system on the load should be known (that usually means that the load must be predictably unchanging with time). Sometimes pure feed-forward control without feedback is called 'ballistic', because once a control signal has been sent, it cannot be further adjusted; any corrective adjustment must be by way of a new control signal. In contrast 'cruise control' adjusts the output in response to the load that it encounters, by a feedback mechanism.
With feed-forward control, the disturbances are measured and accounted for before they have time to affect the system. In the house example, a feed-forward system may measure the fact that the door is opened and automatically turn on the heater before the house can get too cold. The difficulty with feed-forward control is that the effect of the disturbances on the system must be accurately predicted, and there must not be any unmeasured disturbances. For instance, if a window were opened that was not being measured, the feed-forward-controlled thermostat might still let the house cool down.
Examples:
- the compounding of dc motors which are excited via special coils using the current of motor armature (this current is increasing as the load is rising);
- a tank has unbalanced turret (weighting more than 8 tons), so a tank turret stabilizer has a special measuring device - linear accelerometer - to create a corresponding signal in order to liquidate the consequences of turret inertial properties.
But it’s reasonable to mention that this control principle allows liquidate only one source of disturbance input signal, so other ones may increase a system error.
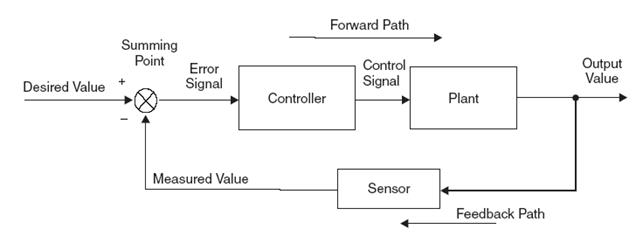
- Feedback control.
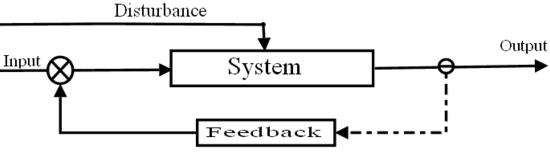
Fig.2.8: Feedback (Closed Loop) control system
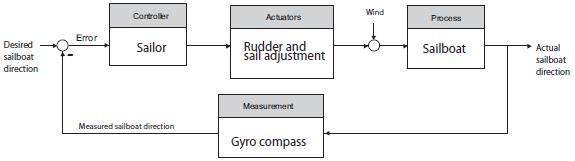
Fig.2.9: Taking a sailboat as the wind shifts
Дата добавления: 2015-03-09; просмотров: 1723;