Задача наладки регуляторов. Параметры и принципы настройки регуляторов непрерывного действия.
Расчетные значения параметров настройки регуляторов для типовых переходных процессов.
Значения коэффициентов усиления и постоянных времени в электрических аналоговых регуляторах устанавливают путем изменения сопротивления соответствующих переменных резисторов.
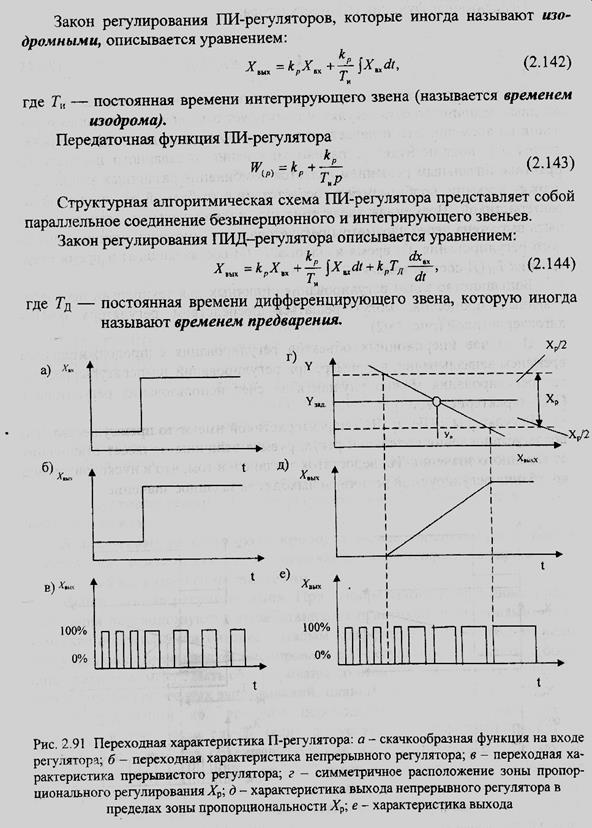
Регуляторы можно настроить без объекта в лаборатории на специально приспособленном стенде при этом на вход регулятора необходимо подавать воздействия в виде изменяющейся регулируемой величины (температуры, влажности, уровня жидкости и т.п.). На выходе регулятора должны быть установлены приборы, регистрирующие изменение управляющего воздействия. На рис. 2.100 приведены динамические характеристики П-, пи- и пид- регуляторов.
При настройке П-регуляторов значение коэффициента усиления kp определяют по динамической характеристике как отношение приращения выходной величины м изменению входной величины ф (рис. 2.100, а).
Приятупая к настройке ПИ-регулятора, сначала отключают интегральную часть и градуируют устройство для настройки. Затем, включив интегральную часть одновременно с пропорциональной, градуируют приспособление для настройки Ти при том же значении kp. Как видно из рисунка2.100, б выходной сигнал регулятора вначале изменяется на  за счет действия пропорциональной части, а затем он нарастает под действием интегральной части. Время, за которое произойдет удвоение выходного сигнала пропорциональной части характеристики, и будет временем изодрома Ти.
за счет действия пропорциональной части, а затем он нарастает под действием интегральной части. Время, за которое произойдет удвоение выходного сигнала пропорциональной части характеристики, и будет временем изодрома Ти.
ПИД-регуляторы градуируют вначале при отключенной интегральной и дифференциальной части, то есть устанавливают величину kp. Затем подключают интегральную часть и аналогично IПИ-регуляторам градуируют устройство для настройки Ти. Для настройки времени предварения Тд включают пропорциональную и дифференциальную части регулятора (при отключенной интегральной части). Устанавливают известное и на вход регулятора подают непрерывно возрастающее воздействие (рис. 2.100, в), скорость нарастания которого постоянна, и регистрируют изменение выходной величины изменяется резко (совершает скачок) за счет действия дифференциальной части, а затем нарастает под действием пропорциональной части.
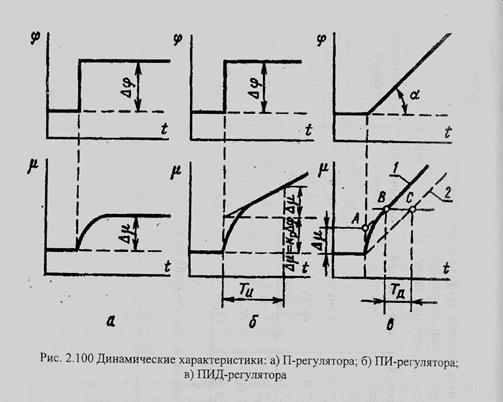
Время предварения Тд определяют как разность времени достижения одних и тех же значений выходной величины регулятора при включений и выключенной дифференциальной части. При выключенных интегральной и дифференциальных частях ПИД-регyлятор превращается в П-регyлятор (характеристика 2). Чтобы найти значение Ти проводят прямую, параллельную оси времени выше точки А так, чтобы она пересекла характеристики 1 и 2. Отрезок ВСв масштабе времени определяет время предварения Тд при данном положении настроечных устройств.
В тех случаях, когда градуировку и настройку выполняют непосредственно на месте установки регулятора, предварительно разъединяют исполнительный механизм и регулирующий орган. Если исполнительный механизме имеет указателя положения, то его снабжают шкалой, градуированной в процентах хода регулирующего органа.
Дата добавления: 2015-02-28; просмотров: 2598;