Расчеты валов на жесткость
Расчет вала на жесткость обязателентолько для особо важных машин, когда деформации вала существенно влияют на работу сопряженных с ним деталей, например зубчатых колес (относительный перекос колес может привести к поломке зубьев из-за усиления концентрации нагрузки), подшипников качения (защемление тел качения в результате чрезмерного угла наклона цапф вала) и др.
Различают изгибную и крутильную жесткость валов. Изгибную жесткость вала оценивают величиной угла наклона упругой линии вала (на рис. 1.5 обозначена цифрой 1) и максимальным прогибом вала “у” по зависимостям:
θ0 ≤ [θ0], y ≤ [y] (1.13)
где θ 0, у – фактические значения угла наклона упругой линии вала и его максимального прогиба;
[θ 0] – допустимый угол наклона упругой линии вала;
[у] – допустимый прогиб упругой линии вала.
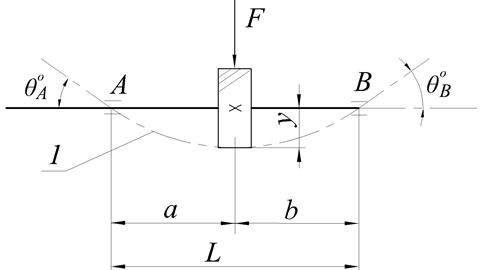
Рис. 1.5. Схема к расчету вала на изгибную жесткость
Прогибы и углы наклона упругой линии валов определяют обычными методами сопротивления материалов. Для простых расчетных случаев следует использовать готовые формулы, рассматривая вал как брус постоянного сечения приведенного диаметра [1, с. 332], а величина допустимого прогиба [у] в месте посадки на вал зубчатых колес может быть определена в зависимости от модуля колеса [2, с. 26]:
· для цилиндрических зубчатых колес [ y] = 0,01m;
· для конических и червячных колес [ y] = 0,005m.
Необходимая крутильная жесткость валов определяется различными критериями. Для большинства валов крутильная жесткость не играет существенной роли, поэтому проверку крутильной жесткости валов выполняют только для трансмиссионных и торсионных валов. Угол закручивания цилиндрического участка вала длиной “l” при действии крутящего момента Твычисляют по зависимости [1, с.332]:
(1.14)
где j 0– крутильная жесткость;
G – модуль сдвига; для стального вала G = 8 ×10 4 МПа;
Jp– полярный момент инерции поперечного сечения вала;
Jp = p × d 4 / 64 , мм 4.
В ф. (1.14) отношение l / (G×Jp) = e – податливость рассчитываемого участка вала, тогда: j 0 = T× е.
Следует отметить, что приводы роботов и манипуляторов относятся к высокоточным и поэтому упругие статические угловые деформации кинематических цепей этих приводов могут сказываться на точности работы машины в целом. Другая особенность приводов роботов и манипуляторов: медленные и плавные перемещения в кинематических цепях этих приводов могут способствовать возникновению скачкообразных движений рабочих органов.
Так, например, при изменении направления вращения вала (реверс) сначала происходит освобождение вала от деформации кручения, а затем закручивание вала на тот же угол (если величина момента не изменилась), но в противоположном направлении. Возникающий при этом мертвый ход равен двойному углу закручивания:
j 0М.Х. =2ТL / (G×J p ).
Отсюда следует, что при недостаточной крутильной жесткости и значительной длине участка вала мертвый ход может оказаться недопустимо большим и приведет к скачкообразному движению рабочего органа робота. Поэтому необходимо ограничение величины угла мертвого хода по условию j0М.Х. ≤ [j0М.Х.][6, с.311].
Дата добавления: 2015-02-19; просмотров: 3875;