Порядок выполнения работы. 1. Получив модель кривошипно - ползунного механизма, в отчете лабораторной работы изображают его структурную схему с обозначением звеньев и кинематических
1. Получив модель кривошипно - ползунного механизма, в отчете лабораторной работы изображают его структурную схему с обозначением звеньев и кинематических пар. Измеряют и записывают необходимые для анализа движения длины звеньев.
2. Устанавливают механизм в исходном положении его звеньев, задают соответствующие значения координаты выходного звена в каждом текущем положении в пределах полного цикла движения механизма. Исходное положение обычно принимают таким, чтобы основная функция получалась бы положительной за весь цикл её изменения. Начальное звено фиксируют через равные интервалы не менее, чем в двенадцати положениях (рис. 4).
3. Изображают кинематическую схему кривошипно-ползунного механизма в произвольном положении кривошипа, которую выполняют в следующей последовательности:
– выбирают место расположения стойки начального звена;
– произвольно (30-50 мм) выбирают чертежный размер начального звена;
– раствором циркуля, равным выбранному размеру, проводят тонкой линией траекторию движения начального звена (кривошипа);
– определяют масштабный коэффициент длин  =
=  , где
, где  -истинная длина кривошипа , ОА- выбранный чертежный размер кривошипа;
-истинная длина кривошипа , ОА- выбранный чертежный размер кривошипа;
– в соответствии с масштабом находят чертежный размер шатуна АВ=  [мм];
[мм];
– проводят окружность радиусом ОА, которая является траекторией движения точки А;
– находят крайние положения механизма. Для кривошипно-ползунного крайними будут такие положения, когда кривошип и шатун то вытягиваются, то складываются в одну линию;
– начиная от начального положения, разбивают траекторию движения точки А на двенадцать равных частей. Тонкой линией прорисовывают кривошип и его кинематические пары во всех этих положениях;
– с помощью циркуля-измерителя, начиная от кривошипа, который находится в начальном положении, используя метод засечек, чертежной длиной шатуна делают засечку на траектории движения ползуна. Тонкими линиями прорисовывают звенья и кинематические пары. В результате получают план положения механизма - кинематическую схему.
Аналогично строят планы для других положений механизма (всего 12 положений). На траектории движения ползуна получат двенадцать положений точки В.
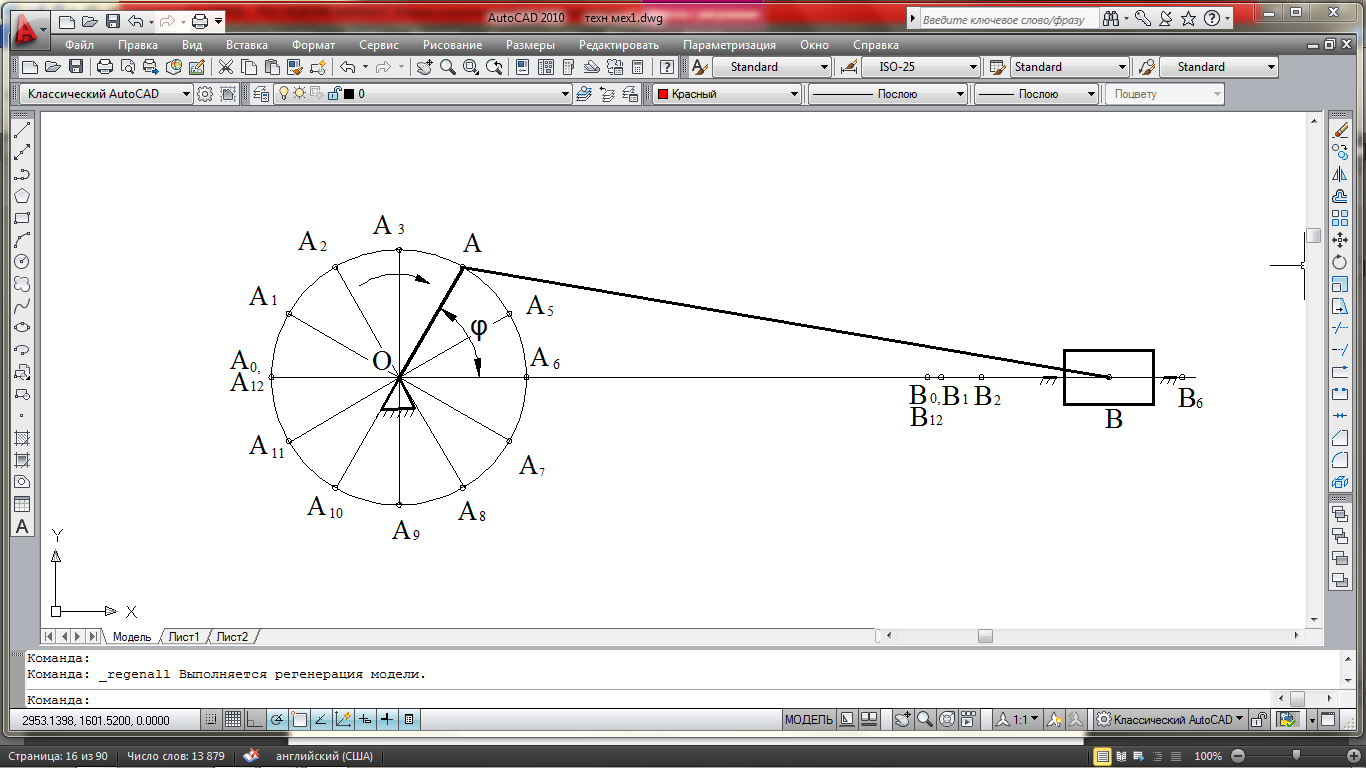
Рис. 4 Кинематическая схема кривошипно-ползунного механизма
4.Для кривошипно-ползунного механизма строят график перемещения точки В в следующей последовательности (рис. 5):
По оси ординат откладывают перемещение точки В, по оси абцисс– угол поворота кривошипа  . На оси абцисс отрезок О-О, равный 120 мм , делят на 12 равных частей. Точки на оси абцисс 1, 2, 3 и т.д. соответствуют 1, 2, 3 и т.д. положениям механизма.
. На оси абцисс отрезок О-О, равный 120 мм , делят на 12 равных частей. Точки на оси абцисс 1, 2, 3 и т.д. соответствуют 1, 2, 3 и т.д. положениям механизма.
Перемещение точки В при движении механизма из нулевого положения в первое выражается отрезком  , из нулевого положения во второе –отрезком
, из нулевого положения во второе –отрезком  и т.д. Если перемещения ползуна измерять непосредственно на плане механизма и отложить ординатой 1-
и т.д. Если перемещения ползуна измерять непосредственно на плане механизма и отложить ординатой 1-  , 2-
, 2-  и т.д., то масштаб
и т.д., то масштаб  перемещений графика совпадает с масштабом
перемещений графика совпадает с масштабом  длин кинематической схемы механизма. Полученные точки 0, , ,
длин кинематической схемы механизма. Полученные точки 0, , ,  и т.д. соединяют плавной кривой.
и т.д. соединяют плавной кривой.
Полученный график – график линейных перемещений точки В:  = ( ) (рис. 5).
= ( ) (рис. 5).
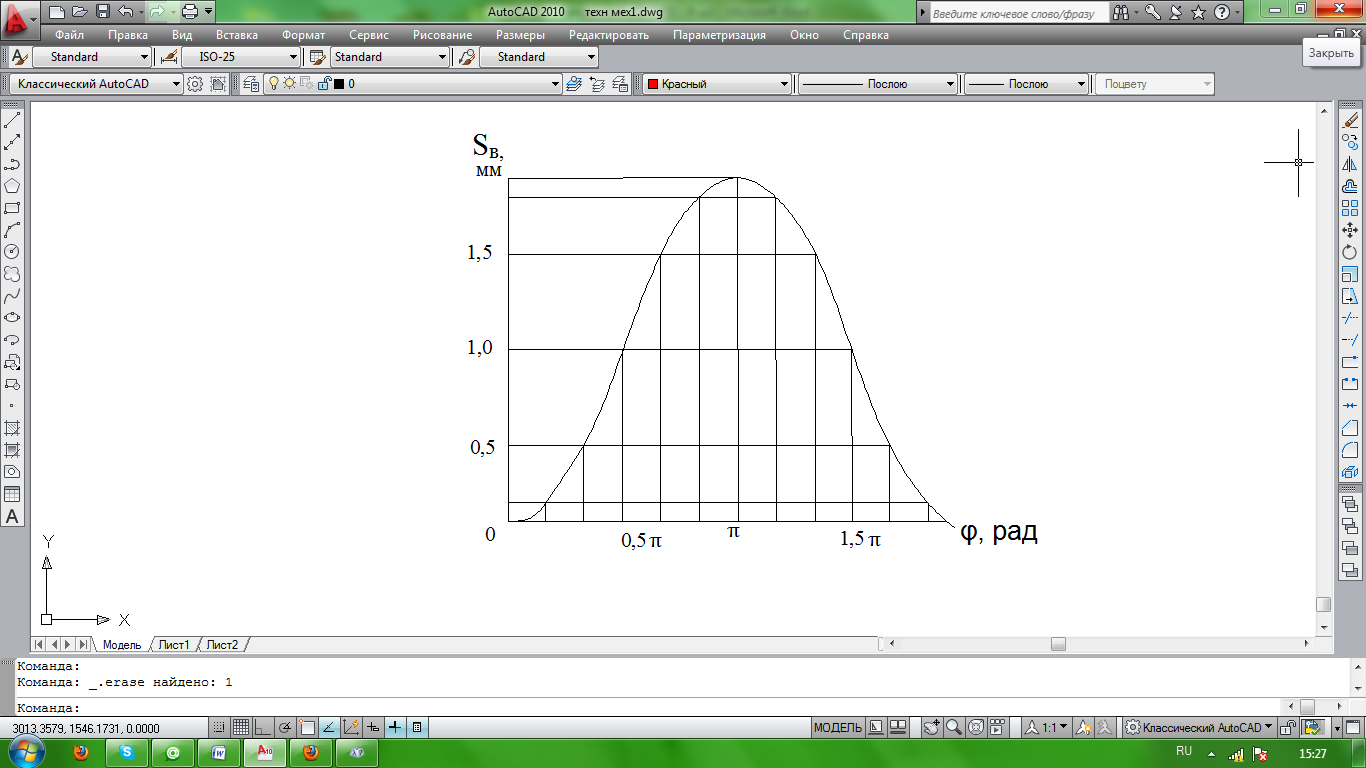
Рис. 5 График основной функции механизма
5.Выполненные измерения оформляют в виде отчета, в котором дают наименование и цель работы, краткую характеристику механизма, строят масштабную кинематическую схему механизма в одном произвольном положении звеньев. На схеме отражают тонкими линиями исходное положение механизма и показывают координаты начального и выходного звеньев в текущем положении. В подрисуночной надписи с наименованием механизма и его звеньев указывают масштабный коэффициент длин.
6. Координаты из протокола наблюдений представляют в таблице отчета в безразмерном виде (линейные размеры – в длинах начального кривошипа, углы – в радианах). По табличным данным строят масштабный график основной функции механизма в зависимости от начальной координаты в прямоугольной системе с указанием соответствующих масштабных коэффициентов. Соотношение наибольших размеров графика по осям координат выдерживают общепринятым (4:3). К защите предъявляют оформленный отчет.
Дата добавления: 2015-02-13; просмотров: 864;