АНТРОПОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЧЕЛОВЕКА
Антропометрические характеристики определяются размерами тела человека и его отдельных частей и используются для проектирования наиболее рациональных, а значит и безопасных условий труда, так как они позволяют рассчитывать пространственную организацию рабочего места, устанавливать зоны досягаемости и видимости, размеры конструктивных параметров рабочего места и приспособлений (высота, ширина, длина, глубина и т. п.).
Антропометрические характеристики (АХ) подразделяют на динамические и статические. Их состав показан на рис. 2.6.
Динамические АХ используются для определения объема рабочих движений, зон досягаемости (табл. 2.5, рис. 2.7) и видимости, по ним рассчитывают пространственную организацию рабочего места.
 |
Рис. 2.6. Классификация антропометрических характеристик
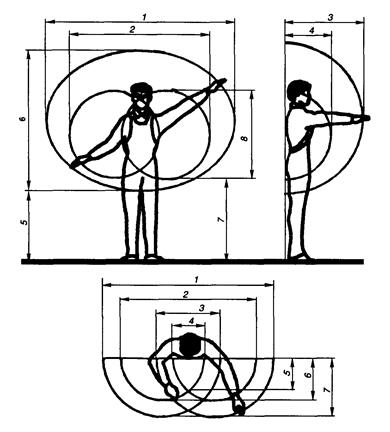
Рис. 2.7. Зоны досягаемости (1—8) рук человека в вертикальной плоскости
Статические АХ могут быть линейными и дуговыми. В зависимости от ориентации тела в пространстве линейные размеры делятся на продольные (высота различных точек над полом или сиденьем), поперечные (ширина плеч, таза и т. п.), переднезадние (передняя досягаемость руки и др.). Последние две группы линейных АХ иначе называются диаметрами.
Минимальные и максимальные значения антропометрических характеристик используются с учетом характера выполняемой рабочей операции или выбора параметра приспособления; в тех случаях, когда оператор что-то должен доставать, до чего-то дотянуться, выбирают минимальные значения, а при определении размеров сиденья, высоты ниши для ног и т.п. — максимальные.
Таблица 2.5. Размеры зоны досягаемости рук человека, мм
| Номер позиции на рис. 2.7 | В вертикальной плоскости | В горизонтальной плоскости | ||
| для женщин | для мужчин | для женщин | для мужчин | |
| — | — |
Следует отметить, что (рис. 2.8, а, в) поза «стоя» требует больших энергетиче-ских затрат и менее устойчива из-за поднятого центра тяжести. Поэтому в этой позе быстрее наступает утомление.
Рабочая поза «сидя» (рис. 2.8, б — г) имеет целый ряд преимуществ: резко уменьшается высота центра тяжести над точкой опоры, благодаря чему возрастает устойчивость тела, значительно сокращаются энергетические затраты организма для поддержания такой позы, вследствие этого она является менее утомительной.
Рабочая поза выбрана правильно, если проекция общего центра тяжести лежит в пределах площади опоры. Если в процессе работы действует небольшая группа мышц, то предпочтительнее поза «сидя», при работе большой группы мышц — поза «стоя».
Всякая поза, проекция центра тяжести которой выходит за границы площади опоры, будет вызывать значительные мышечные усилия, т.е. статические напряжения (рис. 2.8, в и г). Длительные статические напряжения мышцы могут вызвать быстрое утомление, снижение работоспособности, профзаболевания (искривление позвоночни-ка, расширение вен, плоскостопие) и травматизм. При проектировании рабочего места необходимо учитывать следующее: если при прямой позе «сидя» мышечную работу принять равной единице, то при прямой позе «стоя» мышечная работа составляет 1,6; при наклонной позе «сидя» — 4, а при наклонной позе «стоя» — 10. Статичная поза утомительнее, чем динамическая.
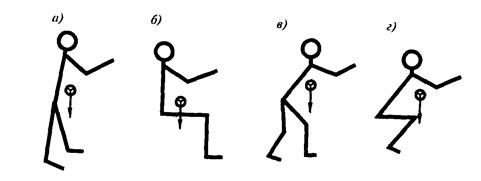
Рис. 2.8. Схема биомеханического анализа рабочей позы при устойчивой (а и б) и неустойчивой (в и г) позах; а, в — стоя; б, г — сидя
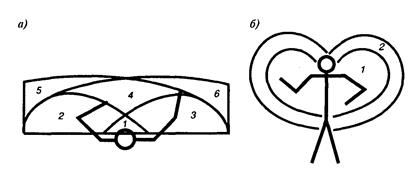
Рис. 2.9. Структурная схема рабочих зон
Наиболее важными моментами, определяющими выбор рабочей позы, являются: а) применяемое усилие в процессе работы; б) степень подвижности рабочего, обуслов-ленная характером и конкретным содержанием технологического процесса; в) величина рабочей зоны и соотношение между антропометрическими характеристиками человека и пространственной организацией рабочих мест.
В тех случаях, когда в процессе работы происходит смена поз, учитывают следу-ющие требования: сохранять одинаковое положение рабочего по отношению к рабочей поверхности как при работе стоя, так и при работе сидя; создавать необходимые усло-вия свободного перехода от одной позы к другой и прежде всего за счет выбора наибо-лее рациональных геометрических размеров рабочей поверхности и средств подмащи-вания.
Пространство рабочего места, в котором осуществляются трудовые процессы, может быть разделено на рабочие зоны. Рабочая поза будет наименее утомительна только при условии, если рабочая зона сконструирована правильно.
Правильное конструирование рабочих зон определяется соответствием их с оптимальным полем зрения рабочего и определяется дугами, которые может описать рука, поворачивающаяся в плече или в локте на уровне рабочей поверхности (т.е. учитывая динамические АХ), а движением рук управляет мозг человека в соответствии с коррекцией глаз. Поэтому рабочую зону, удобную для действия обеих рук, нужно обязательно совмещать с зоной, удобной для охвата человеческим взором. На рис. 2.9 представлены структурные схемы рабочих зон: а — при позе «сидя» в горизонтальной плоскости; б — при позе «стоя» в вертикальной плоскости.
При производственном процессе для позы «сидя» (так же, как и для позы «стоя») каждая зона может быть оценена следующим образом:
Зона 1 является самой благоприятной, поскольку она наиболее применима для точных и мелких сборочных работ, так как в ней работают обе руки и хорошо осуществляется зрительный контроль. В случае оперативной работы в этой зоне следует разместить органы управления и индикаторы, которыми оператору придется пользоваться наиболее часто, интенсивно и быстро.
Зоны 2 и 3 хорошо доступны для одной и мало доступны для другой руки; зрительный контроль осложнен. В этих зонах удобно размещать инструменты и материалы, которые рабочий часто берет правой (левой) рукой, или органы управления, зрительный контроль за которыми не требуется постоянно.
Зона 4 (запасная) — труднодоступная зона; в ней могут быть размещены инструменты и материалы, которые не поместились в зонах 2 и 3.
Зона 5 (зона 6) доступна только для правой (левой) руки; здесь можно разме-стить инструменты и материалы, которые употребляются изредка (например, измери-тельные инструменты), или органы управления, которыми пользуются «не глядя».
В соответствии с рабочими зонами и антропометрическими данными проектируются рабочие места в любом производственном процессе и любые машины и механизмы, обслуживаемые человеком.
Органы управления могут быть ручными и ножными. Предпочтительнее управ-ление ручное, причем выгоднее использовать регуляторы, которые приводятся в движе-ние рукой к себе или от себя. Следует иметь в виду, что движения руки к себе более быстрые, но менее точные, тогда как от себя — более точные, но менее быстрые. Если органы управления не требуют усилий, то оператор «не чувствует» рукоятки и действу-ет очень неточно. Для предотвращения дрожания руки и повышения точности движе-ний требуется определенный момент сопротивления рукоятки в пределах 3...16,7 Н×м. Для ножных педалей при полном их нажатии момент сопротивления должен составлять 20...80 Н×м. Ножные органы управления используют тогда, когда требуются большие усилия и небольшая точность: включение — выключение, грубая регулировка напряже-ния или тока и т.п. При ручном управлении максимальные усилия прилагаются к рыча-гам, которые захватываются стоящим оператором на уровне плеча, а сидящим — на уровне локтя (рис. 2.10), поэтому органы управления, которые используются наиболее часто, следует располагать на высоте между локтем и плечом.
В процессе управления человек обязательно должен прилагать некоторые усилия, так как отсутствие их (что может быть, например, при кнопочном управлении) дезориентирует человека, лишает его уверенности в правильности своих действий, а излишние усилия приводят к биомеханической перегрузке.
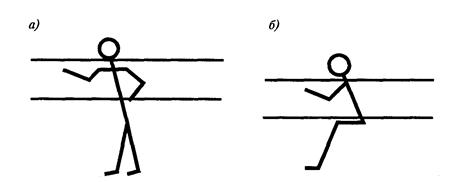
Рис. 2.10. Зона размещения органов управления: а — поза «стоя»; б — поза «сидя»
Форма и размеры органов управления должны быть согласованы с размерами и биомеханическими особенностями руки оператора. Чтобы исключить биомеханическую перегруженность, следует придерживаться соответствия управляющего воздействия на оборудование биомеханическим возможностям человека. Ниже приведены показатели силы (в Н) различных мышечных групп для мужчин (числитель) и женщин (знаменатель). Кисть (сжатие динамометра):
Кисть (сжатие динамометра):
правая рука..................…………………………………… 38,6/22,5
левая рука ...................…………………………………… 36,2/20,4
Бицепс:
правая рука..................…………………………………… 27,9/13,6
левая рука ...................…………………………………… 26,8/13,0
Кисть (сгибание):
правая рука..................…………………………………… 27,9/21,7
левая рука...................……………………………………. 26,6/20,7
Кисть (разгибание):
правая рука..................…………………………………… 11,9/9,0
левая рука...................……………………………………. 10,9/8,3
Стан (мышцы, выпрямляющие согнутое туловище)….. 123,1/71,0
Дата добавления: 2015-02-10; просмотров: 2892;