ВИДЫ ОБЪЕМНЫХ ГИДРОПРИВОДОВ
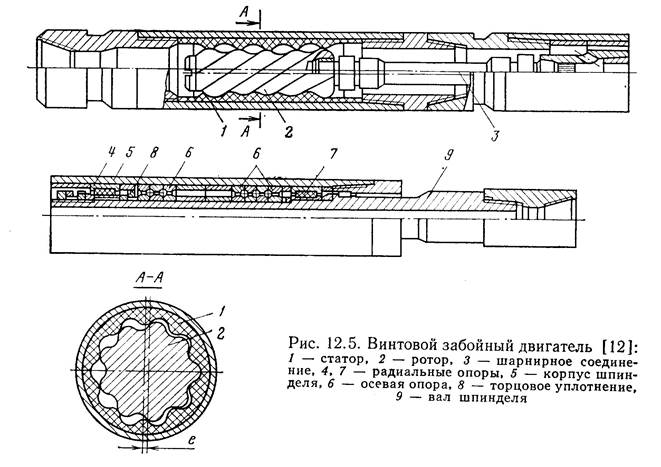
Винтовой двигатель, предназначенный для бурения скважин, построен на базе героторного механизма с гипоциклоидным зацеплением (см. § 44) и кинематическим отношением z2/z1= 9/10.
В поперечном сечении механизма (рис. 12.5, А —А)имеются десять полостей, являющихся сечениями рабочих камер (шлюзов),разделенных контактными линиями.
Общая площадь поперечного сечения шлюзов [12]
Fшл = [2pе2(z2 – l) + 8er] z2,
где е — эксцентриситет; r — радиус зуба зацепления.
Рабочий объем двигателя, так же, как в насосе типа Муано,равен произведению площади шлюзов на шаг обоймы:
q = Fшл Т.
Крутящий момент и частоту вращения ротора можно определить по формулам (12.4) и (12.5).
Рассмотрим влияние числа заходов винта z2 на эти показатели, предполагая, что габариты двигателя, расход рабочей жидкости и перепад давления на шаг остаются постоянными.
Наибольший диаметр полости статора
Dн=2(tz1+r).
Используя обозначение се = е/r,путем простого преобразования получим формулу
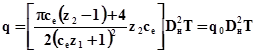
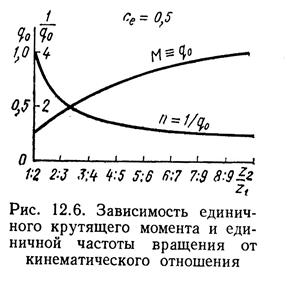 которая показывает, что при заданных габаритах Dни Т рабочий объем зависит только от функции q0двух величин — параметра сеи числа заходов винта z2. Графики этой функции и обратной ей величины для се =0,5 приведены на рис. 12 6. Кривые графика изображают изменение крутящего момента и частоты вращения (при выбранных условиях) и наглядно показывают преимущество многозаходного механизма перед однозаходным в условиях, когда для бурения шарошечным долотом требуется низкооборотный двигатель с высоким крутящим моментом. В данном примере крутящий момент при z2 = 9 приблизительно в 4 раза выше, а частота вращения вала во столько же раз меньше, чем при z2 = 1.
которая показывает, что при заданных габаритах Dни Т рабочий объем зависит только от функции q0двух величин — параметра сеи числа заходов винта z2. Графики этой функции и обратной ей величины для се =0,5 приведены на рис. 12 6. Кривые графика изображают изменение крутящего момента и частоты вращения (при выбранных условиях) и наглядно показывают преимущество многозаходного механизма перед однозаходным в условиях, когда для бурения шарошечным долотом требуется низкооборотный двигатель с высоким крутящим моментом. В данном примере крутящий момент при z2 = 9 приблизительно в 4 раза выше, а частота вращения вала во столько же раз меньше, чем при z2 = 1.
Двигатель и шпиндель связаны двухшарнирным соединением 3 (см. рис. 12.5). Функции и устройство шпиндельнои секции такие же, как в турбобурах. Резиновая обойма статора 1 двигателя, привулканизированная к стальному корпусу, выполнена с начальным натягом по отношению к ротору. Это увеличивает трение в механизме, но способствует снижению утечки жидкости через щели между статором и ротором — утечки, которая возрастает по мере износа рабочих поверхностей. Существует некоторое оптимальное значение натяга, обычно составляющее доли миллиметров, при котором за время работы двигателя на забое его средняя эффективность будет наивысшей.
Для объяснения зависимости частоты вращения вала от нагрузки формулу (12.5) представим в следующем виде:
N=(Q-DQ)/q.
При постоянном расходе Q и отсутствии утечки DQ частота вращения вала двигателя не зависит от крутящего момента. В этом теоретическом случае двигатель обладает жесткой характеристикой. В действительности характеристика М—nнежесткая, что свидетельствует о наличии утечки, нарастающей по мере увеличения М.Это объясняется тем, что вместе с моментом возрастает перепад давления согласно формуле[1].
Dp=2p(M+Mт). (12.6)
Под действием внутреннего давления, а также силы инерции вращающегося по «орбите» ротора, происходит радиальная деформация упругой обоймы статора, приводящая к образованию зазора, несмотря на первоначальный натяг в паре ротор—статор. В результате происходит утечка жидкости через зазор (дополнительно к «работающему» потоку с расходом qn).
Предположим для простоты, что момент сил трения не изменяется. Эксперименты показывают, что утечки жидкости через зазоры гидравлических машин изменяются практически пропорционально перепаду давления. Поэтому примем DQ = аDр. Тогда получим уравнение
 , (12.7)
, (12.7)
с помощью которого и выражения (12.6), а также общих формул мощности N=2pМnи к. п. д. h=N/DpQможно построить кривые теоретической схематизированной характеристики двигателя при Q = idem (рис. 12.7, а).
Так же, как на кривой теоретической характеристики турбины, точка экстремального режима (N = Nmах) расположена в середине графика.
Максимум к. п. д. всегда приурочен к левой части кривой характеристики, что соответствует относительно малым нагрузкам (М0 < Мэ).
Допустил, что имеются опытные данные испытания двигателя при расходе Q на холостом режиме: Dрх, nmах.
Определим вторичные параметры схематизированной характеристики:

Показатели экстремальною режима вычислим по формулам:

В режиме максимального к. п. д. для принятых условий:
Действительные зависимости Dр и n от М нелинейные вследствие влияния на утечки и трение таких факторов, как упругость обоймы статора, первоначальный натяг, характер изменения коэффициента трения в функции удельного давления и частоты вращения ротора и др. Поэтому линии характеристики не прямые, а изогнутые (рис. 12.7, б). При этом точка, соответствующая тормозному режиму, смещается влево, а точка экстремального режима оказывается в правой части графика.
По мере износа рабочих органов кривые характеристики двигателя изменяются. Вследствие снижения момента сил трения линия давления сдвигается к оси М,а возрастание объемов утечек приводит к постепенному приближению кривой характеристики М — nк началу координат и к снижению к. п. д.
Для пересчета данных характеристики по расходу можно пользоваться приведенными приближенными формулами. Считая, что МТ и а не меняются, определим исходные величины


для нового значения Q, после чего становятся известными все показатели экстремального и оптимального режимов.
[1] Dpинд»Dp, так как hг»1.
ВИДЫ ОБЪЕМНЫХ ГИДРОПРИВОДОВ
Основные термины и определения объемного гидропривода установлены ГОСТ 17752—72.
Объемный гидропривод — совокупность устройств, в число которых входит один или несколько объемных гидродвигателей, предназначенных для приведения в движение механизмов и машин давлением рабочей жидкости.
Кроме одного или нескольких источников подачи рабочей жидкости и объемных гидродвигателей, в гидропривод входят:
гидроаппараты — устройства для изменения направления потока, либо поддержания заданного постоянного давления или расхода рабочей жидкости;
гидропреобразователи — объемные гидромашины, предназначенные для преобразования одного потока рабочей жидкости в поток с другими значениями давления и скорости;
кондиционеры рабочей жидкости (очистители, теплообменные аппараты, воздухоспускные устройства);
гидроемкости (гидробаки, гидро- и пневмогидроаккумуляторы);
гидролинии (всасывающая, напорная, сливная, линия управления, дренажная).
Объемные гидроприводы классифицируют по следующим признакам:
1. По источнику подачи рабочей жидкости: насосный, аккумуляторный, магистральный. Наиболее распространен насосный гидропривод, в котором в качестве источника подачи жидкости используются как объемные насосы, так и динамические. Часть насосного гидропривода, предназначенная для передачи движения от приводящего двигателя к машинам и механизмам, называется объемной гидропередачей. Объемная гидропередача, состоящая из устройств, конструктивно оформленных в одно целое, называется гидропередачей нераздельного исполнения.
Если рабочая жидкость подается в объемный гидродвигатель из гидроаккумулятора, предварительно заряженного от внешнего источника, то такой гидропривод называют аккумуляторным. В магистральном гидроприводе рабочая жидкость поступает из гидромагистрали, не входящей в состав привода.
2. По характеру движения выходного звена: поступательного, вращательного и поворотного. В первом случае гидродвигателем является гидроцилиндр, во втором — гидромотор, в третьем — поворотный гидродвигатель.
3. По циркуляции рабочей жидкости: с замкнутой и разомкнутой циркуляцией. В первом случае жидкость от гидродвигателя поступает во всасывающую линию насоса, во втором — в бак.
4. По возможности регулирования: регулируемый, нерегулируемый. В регулируемом гидроприводе скорость выходного звена гидродвигателя может регулироваться по требуемому закону. В зависимости от регулируемого устройства различают регулирование дроссельное, объемное, объемно-дроссельное и регулирование приводящим двигателем.
Дроссельное регулирование осуществляется регулирующими аппаратами (дросселем и др.), объемное — регулируемым насосом или регулируемым мотором или обеими объемными гидромашинами.
Из равенства подачи насоса и расхода жидкости в гидромоторе Qн = Qм или qнnн = qмnмвидно, что
nм=nн(qн/qм),
т. е. частоту вращения вала мотора nм можно регулировать изменением рабочих объемов насоса qн, гидромотора qмили того и другого вместе или, наконец, изменением частоты вращения вала приводящего двигателя nн.
При постоянной частоте вращения вала насоса nн дроссельное регулирование осуществляется более простыми средствами, а объемное обеспечивает более высокий к. п. д. гидропривода.
Регулирование гидропривода может быть ручным и автоматическим. В зависимости от задачи регулирования гидропривод может быть: стабилизированным (скорость выходного звена поддерживается постоянной), программным (скорость изменяется по заданной программе), следящим (скорость изменяется по определенному закону в зависимости от задающего воздействия, которое заранее не определено).
На рис. 13.1, а представлена схема насосного гидропривода вращательного движения с замкнутой циркуляцией и объемным регулированием в обеих машинах. Символические обозначения на схеме соответствуют ГОСТ 2782—77. Насос 4 обеспечивает подпитку всасывающей линии насоса 1,если в результате утечек жидкости здесь образуется вакуум.
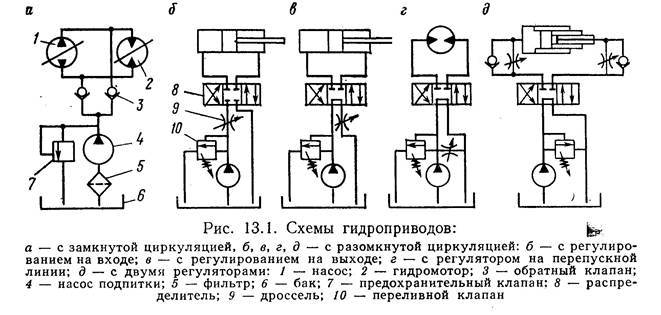
Принципиальные схемы насосных гидроприводов поступательного и вращательного движений с разомкнутой циркуляцией и дроссельным регулированием показаны на рис. 13.1, б, в, г, д. Распределитель 8служит для подключения к насосу той или другой полости гидродвигателя, а дроссель 9в сочетании с переливным клапаном 10 —для регулирования расхода жидкости, поступающей в гидродвигатель и, следовательно, скорости его движения. Варианты б — д различаются числом и местом включения дросселей и определяют свойства гидропривода. В частности, при установке двух дросселей (вариант д) их настройкой можно задавать разные скорости прямого и обратного ходов поршней в телескопическом гидроцилиндре.
| <== предыдущая лекция | | | следующая лекция ==> |
| ВИНТОВОЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ | | | ГИДРОАППАРАТЫ |
Дата добавления: 2015-01-21; просмотров: 2504;