ВИНТОВОЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ
Большинство соответствующих видов гидромоторов и роторных насосов имеет одинаковые устройства, вследствие чего эти машины могут классифицироваться по общим признакам: по устройству — поршневые, шиберные, шестеренные, коловратные, винтовые; по возможности изменять рабочий объем — нерегулируемые и регулируемые; по возможности изменять направление вращения — нереверсивные и реверсивные; по числу циклов, совершаемых в каждой рабочей камере за один оборот вала — однократного и многократного действия. Внутри перечисленных групп существуют общие подгруппы. Так, поршневые моторы делятся на аксиально-поршневые и радиально-поршневые, а шиберные — на пластинчатые и фигурношиберные[1].
Многие роторные насосы при бесклапанном распределении жидкости (см. §43) можно применять, не изменяя их, как гидромоторы, что удобно при комплектации гидравлических систем и особенно в том случае, когда одна и та же гидромашина работает как в насосном, так и в двигательном режимах (в качестве насос-мотора).
Для такого универсального использования насосов и гидромоторов существует, однако, важное ограничение, обусловленное спецификой их действия. В насосе большие нагрузки на контактных поверхностях развиваются лишь после приведения их в действие, а у двигателя максимальный крутящий момент и соответствующие давления и силы трения на опорных поверхностях возникают уже при пуске. Для улучшения пусковых свойств гидромотора особенно важно заменять скольжение качением и сохранять смазочный слой на трущихся поверхностях при запуске. В частности, для использования шестеренного насоса в качестве гидромотора необходимо уменьшить зазоры в подшипниках, обеспечивая этим радиальный зазор между шестернями и корпусом для предотвращения их касания при пуске под нагрузкой.
Принцип действия гидромотора любого вида аналогичен принципу действия поворотного гидродвигателя (см. рис. 12.3, а).Под давлением жидкости на входное звено (поршень, пластину, зуб шестерни, винт или другой подвижной элемент) возникает усилие, тангенциальная составляющая Ткоторого создает момент относительно оси вращения ротора. Вращающий момент от каждого входного звена зависит от положения последнего, поэтому и суммарный мгновенный момент всех тангенциальных сил пульсирует подобно суммарной подаче жидкости при работе той же машины в режиме насоса.
Выражение среднего значения вращающего момента можно получить в общем виде, пользуясь, например, схемами радиально-поршневого кулачкового гидромотора пятикратного действия (рис. 12.4, а)или аксиально-поршневого гидромотора с наклонным блоком (рис. 12.4, б).

За одну половину цикла в рабочей камере момент тангенциальной силы Тположительный, а за вторую половину — отрицательный. Поэтому так же, как в цилиндре возвратно-поступательного насоса, индикаторную работу в каждой камере гидромотора за один цикл можно представить как произведение среднеиндикаторного давления на рабочий объем камеры ринд qк. В zкамерах мотора i-кратного действия индикаторная работа за один оборот ротора равна ринд qкiz или ринд q, где q — суммарный рабочий объем гидромотора.
С учетом момента сил трения Мт имеем равенство
ринд q=(M+Mт)2p. (12.3)
Введем понятие гидромеханического к. п. д.:
 .
.
Выражение (12.3) примет следующий вид:
Dрqhгм = 2pМ. (12.4)
Фактический расход жидкости в гидромоторе Q превышает геометрический qnвследствие объемных потерь (перетеканнй через зазоры). Объемный к. п. д. гидромотора
ho=qn/Q.
При заданном расходе жидкости частота вращения вала
n= (Q/q) ho (12.5)
Полученные формулы показывают, что с увеличением рабочего объема за счет числа камер и кратности действия, во-первых, возрастает крутящий момент при том же давлении и, во-вторых, достигается снижение частоты вращения вала (при постоянном расходе жидкости).
[1] Полная классификация гидромоторов дается в приложении к ГОСТ 17752—72 «Объемный гидропривод и пневмопривод»,
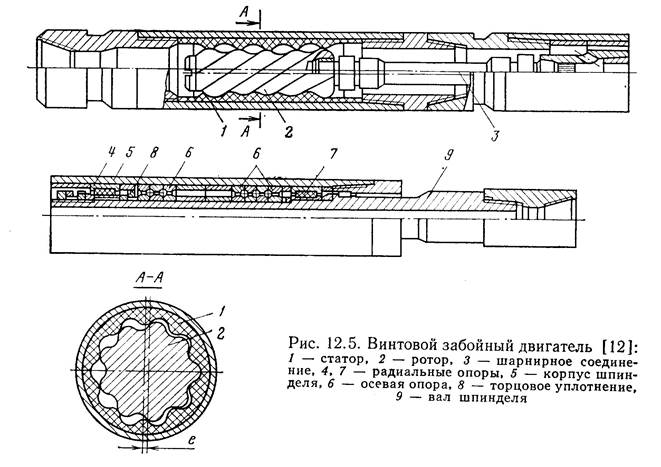
ВИНТОВОЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ
Винтовой двигатель, предназначенный для бурения скважин, построен на базе героторного механизма с гипоциклоидным зацеплением (см. § 44) и кинематическим отношением z2/z1= 9/10.
В поперечном сечении механизма (рис. 12.5, А —А)имеются десять полостей, являющихся сечениями рабочих камер (шлюзов),разделенных контактными линиями.
Общая площадь поперечного сечения шлюзов [12]
Fшл = [2pе2(z2 – l) + 8er] z2,
где е — эксцентриситет; r — радиус зуба зацепления.
Рабочий объем двигателя, так же, как в насосе типа Муано,равен произведению площади шлюзов на шаг обоймы:
q = Fшл Т.
Крутящий момент и частоту вращения ротора можно определить по формулам (12.4) и (12.5).
Рассмотрим влияние числа заходов винта z2 на эти показатели, предполагая, что габариты двигателя, расход рабочей жидкости и перепад давления на шаг остаются постоянными.
Наибольший диаметр полости статора
Dн=2(tz1+r).
Используя обозначение се = е/r,путем простого преобразования получим формулу
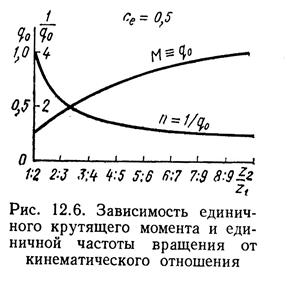 которая показывает, что при заданных габаритах Dни Т рабочий объем зависит только от функции q0двух величин — параметра сеи числа заходов винта z2. Графики этой функции и обратной ей величины для се =0,5 приведены на рис. 12 6. Кривые графика изображают изменение крутящего момента и частоты вращения (при выбранных условиях) и наглядно показывают преимущество многозаходного механизма перед однозаходным в условиях, когда для бурения шарошечным долотом требуется низкооборотный двигатель с высоким крутящим моментом. В данном примере крутящий момент при z2 = 9 приблизительно в 4 раза выше, а частота вращения вала во столько же раз меньше, чем при z2 = 1.
которая показывает, что при заданных габаритах Dни Т рабочий объем зависит только от функции q0двух величин — параметра сеи числа заходов винта z2. Графики этой функции и обратной ей величины для се =0,5 приведены на рис. 12 6. Кривые графика изображают изменение крутящего момента и частоты вращения (при выбранных условиях) и наглядно показывают преимущество многозаходного механизма перед однозаходным в условиях, когда для бурения шарошечным долотом требуется низкооборотный двигатель с высоким крутящим моментом. В данном примере крутящий момент при z2 = 9 приблизительно в 4 раза выше, а частота вращения вала во столько же раз меньше, чем при z2 = 1.
Двигатель и шпиндель связаны двухшарнирным соединением 3 (см. рис. 12.5). Функции и устройство шпиндельнои секции такие же, как в турбобурах. Резиновая обойма статора 1 двигателя, привулканизированная к стальному корпусу, выполнена с начальным натягом по отношению к ротору. Это увеличивает трение в механизме, но способствует снижению утечки жидкости через щели между статором и ротором — утечки, которая возрастает по мере износа рабочих поверхностей. Существует некоторое оптимальное значение натяга, обычно составляющее доли миллиметров, при котором за время работы двигателя на забое его средняя эффективность будет наивысшей.
Для объяснения зависимости частоты вращения вала от нагрузки формулу (12.5) представим в следующем виде:
N=(Q-DQ)/q.
При постоянном расходе Q и отсутствии утечки DQ частота вращения вала двигателя не зависит от крутящего момента. В этом теоретическом случае двигатель обладает жесткой характеристикой. В действительности характеристика М—nнежесткая, что свидетельствует о наличии утечки, нарастающей по мере увеличения М.Это объясняется тем, что вместе с моментом возрастает перепад давления согласно формуле[1].
Dp=2p(M+Mт). (12.6)
Под действием внутреннего давления, а также силы инерции вращающегося по «орбите» ротора, происходит радиальная деформация упругой обоймы статора, приводящая к образованию зазора, несмотря на первоначальный натяг в паре ротор—статор. В результате происходит утечка жидкости через зазор (дополнительно к «работающему» потоку с расходом qn).
Предположим для простоты, что момент сил трения не изменяется. Эксперименты показывают, что утечки жидкости через зазоры гидравлических машин изменяются практически пропорционально перепаду давления. Поэтому примем DQ = аDр. Тогда получим уравнение
 , (12.7)
, (12.7)
с помощью которого и выражения (12.6), а также общих формул мощности N=2pМnи к. п. д. h=N/DpQможно построить кривые теоретической схематизированной характеристики двигателя при Q = idem (рис. 12.7, а).
Так же, как на кривой теоретической характеристики турбины, точка экстремального режима (N = Nmах) расположена в середине графика.
Максимум к. п. д. всегда приурочен к левой части кривой характеристики, что соответствует относительно малым нагрузкам (М0 < Мэ).
Допустил, что имеются опытные данные испытания двигателя при расходе Q на холостом режиме: Dрх, nmах.
Определим вторичные параметры схематизированной характеристики:

Показатели экстремальною режима вычислим по формулам:

В режиме максимального к. п. д. для принятых условий:
Действительные зависимости Dр и n от М нелинейные вследствие влияния на утечки и трение таких факторов, как упругость обоймы статора, первоначальный натяг, характер изменения коэффициента трения в функции удельного давления и частоты вращения ротора и др. Поэтому линии характеристики не прямые, а изогнутые (рис. 12.7, б). При этом точка, соответствующая тормозному режиму, смещается влево, а точка экстремального режима оказывается в правой части графика.
По мере износа рабочих органов кривые характеристики двигателя изменяются. Вследствие снижения момента сил трения линия давления сдвигается к оси М,а возрастание объемов утечек приводит к постепенному приближению кривой характеристики М — nк началу координат и к снижению к. п. д.
Для пересчета данных характеристики по расходу можно пользоваться приведенными приближенными формулами. Считая, что МТ и а не меняются, определим исходные величины


для нового значения Q, после чего становятся известными все показатели экстремального и оптимального режимов.
[1] Dpинд»Dp, так как hг»1.
| <== предыдущая лекция | | | следующая лекция ==> |
| ГИДРОМОТОРЫ | | | ВИДЫ ОБЪЕМНЫХ ГИДРОПРИВОДОВ |
Дата добавления: 2015-01-21; просмотров: 1530;