Определение законов движения толкателя.
Кулачковые механизмы можно разделить на две группы. Механизмы первой обеспечивают перемещение толкателя по заданному закону движения. Механизмы второй группы обеспечивают только заданное максимальное перемещение выходного звена - ход толкателя. При этом закон, по которому осуществляется это перемещение, выбирается из набора типовых законов движения в зависимости от условий эксплуатации и технологии изготовления.
Закон движения толкателя задается в виде зависимости ускорения толкателя, так как именно по ускорению проще судить об условиях работы механизма.
Типовые законы движения делятся на законы с жесткими (рис. 4.9, а) и мягкими (рис. 4.9, б, в, г) ударами и законы безударные (рис. 4.9, д, е, ж). С точки зрения динамических нагрузок, желательны безударные законы. Однако кулачки с такими законами движения технологически более сложны, так как требуют более точного и сложного оборудования, поэтому их изготовление существенно дороже. Законы с жесткими ударами имеют весьма ограниченное применение и используются в неответственных механизмах при низких скоростях движения и невысокой долговечности. Кулачки с безударными законами целесообразно применять в механизмах высокими скоростями движения при жестких требованиях к точности и долговечности. Наибольшее распространение получили законы движения с мягкими ударами, с помощью которых можно обеспечить рациональное сочетание стоимости изготовления и эксплуатационных характеристик механизма.
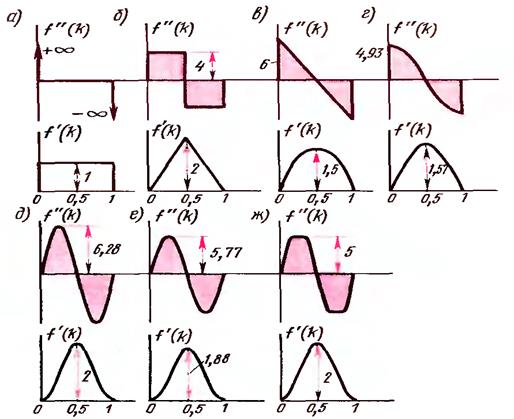
Рис. 4.9. Законы движения толкателя: а) линейный, б) параболический, в) равномерно убывающий, г) косинусоидальный, д,е) синусоидальный, ж) трапецеидальный
При синтезе кулачковых механизмов удобно пользоваться не величинами скорости v и ускорения a толкателя, а их аналогами vq и aq. Аналоги скорости и ускорения это зависимости скорости и ускорения не от времени, а от обобщенной координаты механизма, в данном случае – от угла поворота кулачка. Связаны они такими зависимостями:
 , м,
, м,  , м.
, м.
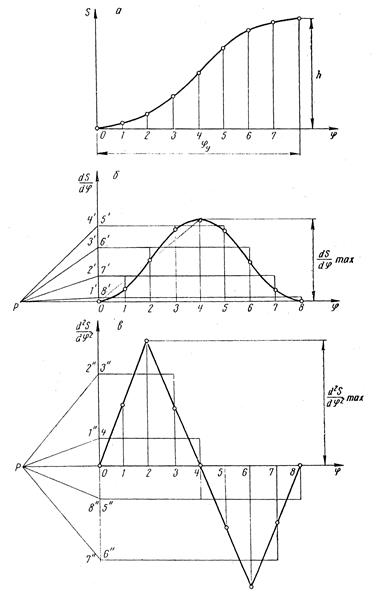
После выбора вида закона движения определяют законы изменения скорости и перемещения толкателя методом кинематических диаграмм.
Путем графического интегрирования из графика ускорения (аналога ускорения) получают график скорости (аналога скорости), проинтегрировав график скорости (аналога скорости), получают график перемещения толкателя (рис. 4.10).
 | |||
|
Дата добавления: 2015-01-19; просмотров: 3252;