Удаление временной избыточности
Рассматриваемый способ основан на том обстоятельстве, что различие между двумя последовательными изображениями очень мало. Таким образом, нет необходимости передавать содержание каждого видеокадра полностью, поскольку большая часть текущего кадра просто повторяет предыдущий кадр. Временное сжатие выполняется на группе изображений (GOP – group of pictures), состоящей из 12 кадров. Содержимое первого кадра группы, называемого кадром I, сохраняется в памяти и используется как эталонный кадр для последующих 11 кадров (рис. 5.20). Содержимое кадра, следующего сразу же за эталонным кадром I, сравнивается с кадром I для образования разностного кадра, называемого кадром Р (от predicted – предсказываемый), который используется для обработки. Затем с первым кадром после кадра I сравнивается второй кадр после кадра I, третий кадр со вторым и т. д. до конца группы из 12 видеокадров. Затем для следующей группы из 12 кадров образуется новый эталонный кадр I и т.д. Величина сжатия кадров I ограниченна; максимальное битовое сжатие получается в кадрах Р. Повышенное сжатие можно получить, используя два других способа: прямое предсказание и предсказание с компенсацией движения.
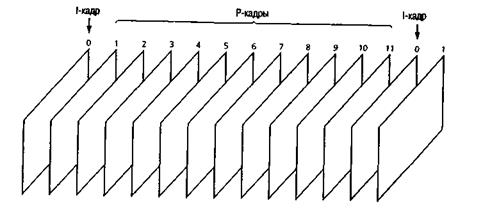
Рис. 5.20. Группа изображений (GOP)
Прямое предсказание – это метод, который используется для создания кадров Р; он включает в себя предсказание ожидаемой разности между макроблоками последовательных кадров и передачу предсказанных кадров на обработку. Для этого требуется хранение более одного видеокадра. В прямом предсказании в качестве эталонного можно использовать кадр I или ранее восстановленный кадр Р. Недостатком этого способа является то, что возникающие в кадре Р ошибки будут передаваться в последующие кадры до поступления очередного кадра I.
Предсказание с компенсацией движения заключается в сравнении содержимого предыдущего кадра и последующего кадра для конструирования текущего кадра. Конструируемый кадр называется кадром В от backward-prediction – обратное предсказание (или от bidirectional – двунаправленный, поскольку его содержимое зависит как от предыдущего кадра, так и от последующего). В отличие от кадров I и Р кадры В нельзя использовать как эталоны. Они также требуют хранения двух кадров в памяти изображения. На рис. 5.21 показана типовая последовательность из 12 кадров I, Р и В (0-11).
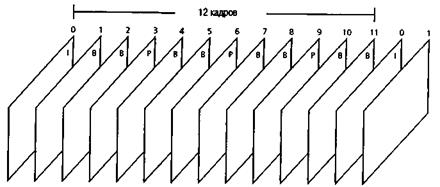
Рис. 5.21. Кадры I, P и В
Дата добавления: 2015-03-20; просмотров: 1164;