Уравнения и графики электромеханических характеристик двигателя постоянного тока независимого возбуждения.
При выводе уравнений для статических характеристик двигателя примем следующие допущения: реакция якоря не учитывается; момент на валу двигателя равен электромагнитному моменту. Тогда уравнения для напряжения, ЭДС якоря и электромагнитного момента будут иметь вид
| U = E + IR; (4.1) Е = кФω; (4.2) М= кФI, (4.3) где R = RЯ + RД - полное сопротивление цепи якоря, Ом; Ф - магнитный поток, Вб; U- подводимое к якорю напряжение, В; к =pNl(2πa) -конструктивный коэффициент двигателя; р - число пар полюсов; N -число активных проводников обмотки якоря; а - число параллельных ветвей обмотки якоря. Подставляя (4.2) в (4.1), получим формулу для электромеханической характеристики ω(I): ω = (U – IR)/(kФ). (4.4) | 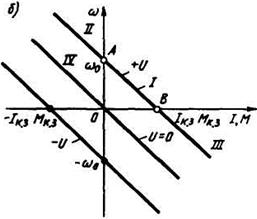
|
В соответствии с (4.4) электромеханическая и механическая характеристики ДПТНВ представляют собой линейные зависимости угловой скорости (далее скорости) от тока и момента, вид которых для разных полярностей питающего якорь напряжения показан на рис. 4.1, б.
Характерными точки А холостого хода, в которой ω = ω0, а I = М = 0, и точка В короткого замыкания, где ω = 0, а / = /кз и М = Мкз. Отметим, что режим короткого замыкания для электрической машины соответствует неподвижному состоянию якоря при поданном на двигатель напряжении, а не замыканию его электрических цепей между собой или на корпус. Режим короткого замыкания называется также пусковым режимом, поскольку является начальным при включении (пуске) двигателя.
Уравнения (4.4) и (4.5) можно записать в сокращенной форме:
ω = ω0 - ∆ω,
где ωо - скорость идеального холостого хода двигателя,
ω0 = U/(кФ);
∆ω - изменение угловой скорости относительно скорости идеального холостого хода,
∆ω = IR/(кФ) = МR/(кФ)2.
На рис. 4.1,6 показана также характеристика ДПТНВ, уравнения которой получают из (4.4) и (4.5) при U = 0:
ω = -IR/(кФ);
ω = -МR/(кФ)2.
Зависимости ω (I) и ω (M) при U = 0 также являются линейными.
Условия выбора проводов и жил кабеля в сетях выше 1000В.
Сечения проводов и жил кабелей должны выбираться в зависимости от ряда факторов, которые разделяются на технические и экономические.
Технические факторы, влияющие на выбор сечений, следующие:
1)нагрев от длительного выделения тепла рабочим (расчетным) током;
2)нагрев от кратковременного выделения тепла током короткого замыкания;
3)потери (падение) напряжения в жилах кабеля или проводах воздушной линии от проходящего по ним тока в нормальном и аварийном режимах;
4)механическая прочность - устойчивость к механической нагрузке (собственная масса, гололед, ветер);
5)коронирование - фактор, зависящий от применяемого напряжения, сечения провода и окружающей среды.
Методика выбора сечения при U ≤ 35 кВ:
- Выбор сечения по экономической плотности тока: F = Iнб / jэк.
- Проверка выбранного сечения по длительно-допустимому току: Iрасч ≤ Iдлит. доп.
- Проверка кабелей по термической стойкости.
- Проверка по потере напряжения: ΔUдоп = ± 5% Uном.
- Проверка проводов по механической прочности. (проверка на корону не производится)
- Окончательно выбирается наибольшее сечение.
Методика выбора сечения при U ≥ 110 кВ:
- Выбор сечения по экономической плотности тока: F = Iнб / jэк.
- Проверка выбранного сечения по длительно-допустимому току: Iрасч ≤ Iдлит. доп.
- Проверка кабелей по термической стойкости.
- Проверка проводов по условиям короны (проверка проводов по потере напряжения не производится).
- Проверка кабелей по потере напряжения.
- Проверка проводов по механической прочности не производится, т.к. сечение проводов по условиям короны превышает сечение по механической прочности.
- Окончательно выбирается наибольшее сечение.
Экономический выбор целесообразного сечения по ПУЭ производят по так называемой экономической плотности тока в зависимости от металла провода и числа часов использования максимума нагрузки в соответствии с выражением sЭ = IР / jЭ
где /р — расчетный ток; jэ — экономическая плотность тока.
Выбор сечения жил кабелей по нагреву током короткого замыкания. Для выбора термически устойчивого сечения жил кабеля необходимо иметь значение установившегося тока короткого замыкания из соответствующего расчета и возможное время прохождения этого тока через кабель. Время определяется уставкой защиты, которая имеет наибольшее значение выдержки времени (если есть несколько видов защиты).
Определение сечения по термической стойкости производится по формуле
 ,
,
где С – постоянный коэффициент, равный для алюминиевых жил 10,5  , I(3)К – ток КЗ в конце кабельной линии, tП – приведённое время действия тока КЗ:
, I(3)К – ток КЗ в конце кабельной линии, tП – приведённое время действия тока КЗ:
tП = 1,1· tОТКЛ = 1,1· (tВЫК + tРЗ),
где tОТКЛ – время отключения тока КЗ, tРЗ – время действия релейной защиты.
Кабели, защищенные плавкими токоограничивающими предохранителями, на термическую стойкость к токам к. з. не проверяются, поскольку время срабатывания предохранителя мало (0,008 с) и выделившееся тепло не в состоянии нагреть кабель до опасной температуры.
Выбор сечений жил кабелей и проводов воздушных линий по потерям напряжения. Потери напряжения в трехфазной линии переменного тока могут быть приближенно определены из выражения
∆U = √3 IР(rcosφ + xsinφ)
IР - расчетный ток линии, А; r и х - активное и индуктивное сопротивления линии, Ом; cosφ - коэффициент мощности в конце линии.
Если пренебречь индуктивным сопротивлением проводов линии, когда х < 1/3, то потери напряжения будут равны:
∆U = IР rcosφ , где r = l / γs, следовательно,
∆U = √3 IР lcosφ / γs → s = √3 IР lcosφ / γ∆U
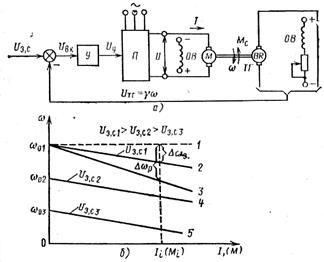
Принцип построения системы регулирования скорости с отрицательной обратной связью по скорости. Какие параметры влияют на величину скорости и жесткости механической характеристики?
Структурная схема замкнутой системы с жесткой отрицательной обратной связью по скорости ДПТ показана на рис. 3.19, а. Ее основу составляет разомкнутая схема П—Д. На валу ДПТ находится датчик скорости — тахогенератор ТГ (BR), выходное напряжение которого UТг, пропорциональное скорости ДПТ ω, является сигналом обратной связи. Коэффициент пропорциональности γ носит название коэффициента обратной связи по скорости и определяется данными тахогенератора.
Сигнал обратной связи UТГ = UОС сравнивается с задающим сигналом скорости U3,c, и их разность в виде сигнала рассогласования (ошибки) UВХ подается на вход дополнительного усилителя У, который с коэффициентом ky усиливает сигнал рассогласования UВХ и подает его в виде сигнала управления Uy на вход преобразователя П.
Таким обр., UВХ = UЗС – γω; UУ = kУUВХ.
Формулы для характеристик ДПТ в замкнутой системе имеют вид:
 где с = СФНОМ;
где с = СФНОМ;  - общий коэффициент усиления системы. - общий коэффициент усиления системы.
| 
|
Для анализа жесткости получаемых характеристик сопоставим перепады скорости в разомкнутой ΔωР и замкнутой ΔωЗ системах при одном и том же токе или моменте:

Так как KС > 0, то всегда ω3 < ωР, т.е. жесткость получаемых характеристик в замкнутой системе больше жесткости характеристик в разомкнутой системе. Это показано на рис. 3.19,6, где для сравнения приведены характеристики ДПТ в разомкнутой (прямая 3) и замкнутой (прямая 2) системах. На этом же рисунке приведены характеристики замкнутой системы при меньших значениях задающего сигнала U3,c (прямые 4 и 5), которые располагаются параллельно характеристике 2.
Для нахождения предельной по жесткости характеристики будем увеличивать коэффициент усиления системы kС. При kС → ∞ Δω3 → 0, т.е. в пределе в данной замкнутой системе может быть получена абсолютно жесткая характеристика. Эта характеристика изображена на рис. 3.19,6 в виде штриховой линии 1.
Отметим, что абсолютно жесткая механическая характеристика на практике не реализуется из-за существенного ухудшения при этом динамики электропривода. Предельные коэффициенты усиления и обратных связей ограничиваются по условиям получения заданных динамических свойств электропривода.
Дата добавления: 2015-03-19; просмотров: 2325;