Механизмы нестабильности сигналов синхронизации
На практике в цифровой сети нестабильность сигналов синхронизации или хронирующих сигналов возникают по причинам как физическим, из-за внешних электрических помех и изменения физических параметров линии передачи, так и алгоритмическим (например, джиттер стаффинга и смещения указателей) [4]. Результирующую' нестабильность тактовой частоты называют фазовым дрожанием синхросигнала или джиттером. В зависимости от его частоты различают высокочастотное фазовое дрожание (выше 10 Гц), называемое собственно джиттером, и низкочастотное (ниже 10 Гц), называемое дрейфом фазы или вандером. Джиттер наиболее сильно влияет на фазовую синхронизацию и почти не влияет на синхронизацию в сети, вандер, наоборот может накапливаться в сети и сильно воздействует на систему синхронизации.
Основными физическими причинами нестабильности частоты являются: электромагнитная
интерференция; шумы и помехи, воздействующие на цепь синхронизации в приемнике; изменения длины линейного тракта и скорости распространения синхросигналов; доплеровские сдвиги сигналов подвижных оконечных устройств; нерегулярное поступление синхросигнала. К алгоритмической причине нестабильности частоты относится процесс выравнивания скоростей передачи с использованием битового или байтового стаффинга, например, смещения указателей.
Из-за шумов и помех различной природы и структуры повышается вероятность неправильного принятия сигнала синхронизации, в результате чего система фазовой автоподстройки частоты может выйти из режима захвата. То есть помехи и шумы влияют на фазовую синхронизацию и не приводят к появлению вандера.
Длина линейного тракта изменяется при изменении его физических параметров, которые в свою очередь возникают из-за изменения температуры или рефракции радиосигнала в атмосфере. Увеличение длины тракта приводит к уменьшению групповой скорости сигнала в физическом канале, что снижает эффективную скорость передачи на входе приемника, а уменьшение длины линейного тракта приводит к ее увеличению на входе приемника Наиболее существенно изменение длины линейного тракта влияет на космический (спутниковый) канал связи: на геостационарной орбите эти изменения могут достигать до 300 км, что соответствует изменению времени прохождения сигнала до 1 мс. Изменение длины линейного тракта влияет на систему частотной синхронизации, поскольку изменение скорости передачи эквивалентно вандеру - основному параметру нестабильности систем частотной синхронизации.
Изменение скорости распространения сигнала обычно связано с изменением характеристик среды передачи или физического канала и наиболее характерно для радиосистем. Механизм влияния этого параметра аналогичен изменению длины линейного тракта и приводит, в конечном итоге, к вандеру.
Доплеровский сдвиг частоты - наиболее значительный источник потенциальной нестабильности тактовой частоты на приеме, и возникает на объектах подвижной связи, таких как самолеты, спутники и т.п. Например, при движении самолета со скоростью 500 км/ч доплеровский сдвиг частоты эквивалентен нестабильности тактовой частоты, равной 5x10 -7.
Нерегулярное поступление синхросигнала (хронирующей информации в сигнале) приводит к фазовым дрожаниям тактовой частоты приемника. Его механизм можно пояснить следующим образом. Основное требование состоит в том, чтобы код в цифровой системе передачи обеспечивал уровень синхросигнала достаточный для установления и поддержания колебаний тактовой частоты в приемнике на конце линии. Бели этот уровень зависит от характера цифрового сигнала, то фазовые дрожания в восстановленных колебаниях тактовой частоты увеличиваются в течение периодов времени с относительно низкими плотностями импульсов, от которых зависит синхронизация. Амплитуда фазовых дрожаний зависит не только от плотности импульсов, но и от структуры цифрового сигнала (в смысле содержания в нем хронирующей информации). Именно требование повысить плотность хронирующей информации привело к необходимости замены линейного кода AMI на линейный код HDB3 в системах ИКМ с TDM.
Различают синхронные и асинхронные режимы приема-передачи цифрового сигнала. Упрощенное описание каждого из методов приведено ниже. При синхронном режиме битовый, поток между приемником и передатчиком носит непрерывный характер. При асинхронном режиме данные передаются в виде организованных битовых последовательностей - пакетов. В промежутках между пакетами линия молчит - сигнала нет. При синхронном режиме приема-передачи таймер приемника выделяет в приходящей битовой последовательности специальные сигналы -синхроимпульсы, на основании которых приемник регулярно настраивает или подстраивает свои часы. При асинхронном режиме приема-передачи приемник имеет свой независимый таймер. Принимая начальные биты пакета (преамбулу), таймер приемника настраивает узел принятия решения так, чтобы определение приходящего бита выполнялось на его середине. Электрический сигнал, который выдает узел принятия решения, идет на частоте таймера. Так как есть погрешность у разных таймеров, то, по мере принятия последующих битов пакета, момент определения приходящего бита плавно смещается в одну из сторон относительно середины приходящего бита. Для правильной идентификации всех битов пакета важно, чтобы смещение за время принятия пакета не превысило 0,5 бита. Это приводит к ограничению на максимальную длину пакета. Чем меньше погрешность таймеров, тем большая длина пакета может использоваться для передачи.
Тактовая синхронизация.Итак, совершенно ясно, что такие устройства, как АЦП и ЦАП, должны работать, как говорится, в такт, синхронно. Если, скажем, АЦП выдает 8-разрядныекодовые слова:
10011010 | 010Ш01 | 10010101 | 00011010
где каждый бит появляется через строго определенные интервалы времени — такты, то, чтобы ЦАП расшифровывал именно эти кодовые комбинации, он должен "выбирать" биты из последовательности точно через те же интервалы, в те же такты. Генераторы тактовых импульсов (ТТИ) имеются как на передающей, так и на приемной сторонах. Это они дают ."указания", кода АЦП выдавать, а ЦАПу соответственно принимать очередной бит. Но как согласовать действия этих генераторов, если передающая и приемная станции разделены тысячами верст, а на работу генераторов влияют температура окружающего воздуха, его влажность, изменение напряжения питания и другие факторы. В результате интервалы между управляющими (тактовыми) импульсами на передающей и приемной станциях могут существенно отличаться друг от друга, и следовательно, ЦАП декодирует совсем не ту последовательность, которая передана. К сожалению, искажение информации случается даже при очень небольших расхождениях длин тактовых интервалов, так как с течением времени все равно наступит момент, когда ЦАП начнет "ошибаться" в выборе битов.
Несинхронность генераторов тактовых импульсов передающей и приемной станций скажется и на том, что "двери" мультиплексора будут открываться не в такт друг с другом. Как в случае несовпадения скоростей вращения щеток в распределителях Бодо, информация из одного канала передающей станции будет попадать совсем в другой канал приемной станции. Вывод из всего сказанного один: нужно синхронизировать работу генераторов передающей и приемной станций на каждом такте. Для этого достаточно знать на приемной стороне частоту следования тактовых импульсов иуправлять генератором приемной станции так, чтобы он выдавал импульсы с той же частотой (такое же количество в секунду). И, конечно же, управлений генератором должно производиться автоматически, без участия человека.
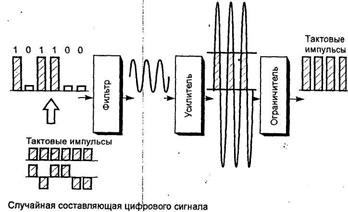 Мы уже говорили о том, что цифровой поток можно представить в виде суммы двух последовательностей: регулярной и случайной (см. pиc 1.14), т.е. можно увидеть тактовые импульсы в явном виде. В спектре тактового сигнала присутствуют основная и высшие гармоники тактовой частоты (см. рис. 1.15). Значит, с помощью электрического фильтра можно выделить из цифрового потока колебание тактовой частоты и затем сформировать из него тактовые импульсы (рис. 5.7).
Мы уже говорили о том, что цифровой поток можно представить в виде суммы двух последовательностей: регулярной и случайной (см. pиc 1.14), т.е. можно увидеть тактовые импульсы в явном виде. В спектре тактового сигнала присутствуют основная и высшие гармоники тактовой частоты (см. рис. 1.15). Значит, с помощью электрического фильтра можно выделить из цифрового потока колебание тактовой частоты и затем сформировать из него тактовые импульсы (рис. 5.7).
| Рис. 5.7. Выделение тактовых импульсов из цифрового потока. |
Электрический фильтр подключают на приемной станции к линии связи параллельно с приемником, чтобы он не мешал цифровому потоку попадать в приемник и то же время сам мог анализировать частотное "содержание" этого потока. Поскольку фильтр изготавливается заранее настроенным на частоту тактовых колебаний, он' и выделяет из поступающего на его вход цифрового потока колебание именно данной частоты. Но колебание одной частот — это всегда синусоидальное колебание. Однако с помощью специальных устройств — усилителя и ограничителя — из него легко "изготовить" колебания в виде последовательности тактовых импульсов. Они-то и будут управлять генератором приемной станции, заставляя его выдавать импульсы с точно таким же интервалом. Синхронизация по тактам действует!
Может возникнуть мысль вообще отказаться от генератора на приемной станции, поскольку тактовые импульсы получены из цифрового потока. Однако это неразумно. Если по каким-либо причинам система синхронизации даст сбой и тактовые импульсы на какое-то время пропадут, то связь по всем каналам немедленно нарушится, что недопустимо. Наличие же генератора на приемной станции дает гарантию, что нарушения связи не произойдет: пройдет достаточно много времени, прежде чем генератор выйдет из синхронизма, а за это время тактовые импульсы могут вновь появиться. Сбой в синхронизации может произойти по многим причинам. Вот одна из них. Глубокой ночью, когда большинство абонентов спит и, естественно, не пользуется услугами связи, в подавляющем большинстве каналов информация не передается, и в цифровом потоке появляются очень длинные последовательности нулей. Не исключено появление длинных последовательностей нулей в цифровом потоке и в любые другие часы.
Устранить эти "белые пятна" в цифровом потоке можно с помощью следующего приема. К двоичным символам цифрового потока прибавляется по правилам двоичной арифметики некоторая двоичная последовательность:
• Цифровой поток 01110000000000000000011
• Скремблер 10101010101010101010101
• Поток в линии 11011010101010101010110
Как видите, в цифровом потоке исчезли длинные последовательности нулей. Теперь из него снова можно выделить тактовые импульсы. А чтобы вернуться к исходному потоку, перед тем как подать его в приемник, нужно снова сложить его по законам двоичной арифметики с той же двоичной последовательностью. Убедитесь в этом сами, без нашей помощи.
Подобная операция получила у специалистов название "скремблирование" (от английского слова scramble — перемешивать). Выполняется она довольно просто с помощью микросхем, "умеющих" складывать двоичные цифры по нужным правилам. Это так называемые "сумматоры по модулю 2", они выпускаются промышленностью. Цифровой поток, перед тем как отправить в линию, подают на один из входов этого сумматора, на второй его вход поступает двоичная последовательность выбранной структуры. Результат суммирования — "скремблированный" цифровой поток — направляется в линию связи. Он уже не содержит длинных последовательностей нулей. Точно такой же сумматор есть и на приемной станции. Через него "пропускаются" выходящий из линии цифровой поток и та же последовательность, что и на передаче. Происходит дескремблирование, и восстановленный в первоначальном виде поток обрабатывается приемником. Естественно,! что для выделения тактовых импульсов используют цифровой поток, еще не подвергшийся процедуре восстановления. I
Итак, синхронизация цифровой системы передачи на каждом такте ее работой осуществлена. Но этого недостаточно, Хотя теперь на приемной станции подключение линии к каналам и происходит в такт с передающей станцией, нужно еще знать, к какому конкретному каналу следует в данный момент подключить линию связи. Другими словами, речь идет о том, что приемная и передающая "электронные щетки" -мультиплексор и демультиплексор, как и в системе Бодо, должны начинать свое "вращение" с одного и того же положения, например с первого канала.
Как же решил эту проблему в своем изобретении Ж. Бодо?
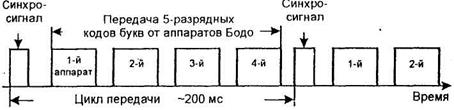
| Рис. 5.8. Цикл передачи в системе Бодо. |
 Он применил оригинальное и довольно простое устройство синхронизации. Если вы посмотрите внимательно на рис. 5.3, на котором изображена система Бодо с "чередованием кодовых комбинаций", то обратите внимание, что на распределителях кроме четырех ламелей (по пять сегментов в каждой), соединенных с четырьмя телеграфными аппаратами, есть еще совершенно отдельный, н£ связанный ни с одной ламелью, 21-й сегмент. На передающем распределителе к нему подключена батарея, а на приемном — электромагнит тормозного устройства. Мотор приемного распределителя вращается чуть быстрее, чем передающего. Теперь представим, что щетка на приемной станции находится в конце упомянутого нами 21-госегмента. Пусть в это время из-за меньшей скорости работы мотора щетка на передающей станции только-только выспупает на такой же сегмент. Заметьте, цепь электромагнита тормозного устройства замкнулась. В результате мотор приемного распределителя притормозился, и его щетка застыла на месте. Она останется неподвижной до тех пор, пока щетка передатчика не совершит весь свой путь по 21-му сегменту. Миг довольно Краткий, но его хватает, чтобы выровнять положение щеток и начать их движение и на приеме, и на передаче с одной и той же позиции, а именно с самого первого в распределителях сегмента. Синхронность начала движения щеток (еще говорят их синфазность) достигается в системе Бодо за счет притормаживания приемного распределителя и установки его тем самым в начальное положение. Если один оборот щеток считать за один цикл передачи информации от всех телеграфных аппаратов, то можно сказать, что каждый новый цикл щетки обоих распределителей начинают одновременно. Такой вид синхронизации уместно назвать синхронизацией по циклам.
Он применил оригинальное и довольно простое устройство синхронизации. Если вы посмотрите внимательно на рис. 5.3, на котором изображена система Бодо с "чередованием кодовых комбинаций", то обратите внимание, что на распределителях кроме четырех ламелей (по пять сегментов в каждой), соединенных с четырьмя телеграфными аппаратами, есть еще совершенно отдельный, н£ связанный ни с одной ламелью, 21-й сегмент. На передающем распределителе к нему подключена батарея, а на приемном — электромагнит тормозного устройства. Мотор приемного распределителя вращается чуть быстрее, чем передающего. Теперь представим, что щетка на приемной станции находится в конце упомянутого нами 21-госегмента. Пусть в это время из-за меньшей скорости работы мотора щетка на передающей станции только-только выспупает на такой же сегмент. Заметьте, цепь электромагнита тормозного устройства замкнулась. В результате мотор приемного распределителя притормозился, и его щетка застыла на месте. Она останется неподвижной до тех пор, пока щетка передатчика не совершит весь свой путь по 21-му сегменту. Миг довольно Краткий, но его хватает, чтобы выровнять положение щеток и начать их движение и на приеме, и на передаче с одной и той же позиции, а именно с самого первого в распределителях сегмента. Синхронность начала движения щеток (еще говорят их синфазность) достигается в системе Бодо за счет притормаживания приемного распределителя и установки его тем самым в начальное положение. Если один оборот щеток считать за один цикл передачи информации от всех телеграфных аппаратов, то можно сказать, что каждый новый цикл щетки обоих распределителей начинают одновременно. Такой вид синхронизации уместно назвать синхронизацией по циклам.
| Рис. 5.9. Цикл передачи в системе ИКМ-30. |
Взглянем на устройство синхронизации, предложенное Ж. Бодо, с более общих позиций. Когда щетка передающего распределителя скользит по сегменту, соединенному с батареей, в линию посылается "отрезок" постоянного тока, т.е. импульс. Этот импульс является ничем иным, как синхросигналом, дающим приемнику указание "начинаем новый цикл!", и приемник исполнял эту директиву, притормаживая распределитель с тем, чтобы сразу же после окончания синхросигнала начать новый цикл. Таким образом, один цикл работы системы Бодо включает в себя (рис. 5.8) передачу в линию сначала сигнала5-разрядных кодовых комбинаций букв от каждого телеграфного аппарата. Длится такой цикл по современным понятиям невероятно долго — около 200 мс. Это и понятно, ведь мотору приходится совершать около 5 об./с (300 об./мин), а для небольших моторов |это и сейчас едва ли не предел. ;
Систему, предупрежденную Бодо, можно считать прямой предшественницей схем цикловой синхронизации, применяемых в современных 'цифровых системах передачи, поскольку и во всех современных системах, перед тем как объединять цифровые потоки различных каналов, в приемник посылается сигнал о начале цикла. Приемное устройство "знает": поступил такой синхронизирующий сигнал — распахивай "двери" демультиплексора для цифрового потока первого канала. Затем под "руководством" | тактовых импульсов открываются следующие "двери" для Цифровых потоков остальных каналов. С приходом нового синхросигнала начинается все сначала, опять с первых "дверей".
Синхросигнал нужно как-то отличать от других принятых комбинаций. Для этого ему присваивают вполне определенную комбинацию 0 и 1. Например, в разработанной российскими специалистами системе передачи ИКМ-30 для синхросигнала принята следующая комбинация: 0011011 (рис. 5.9). Но где гарантия, что подобная комбинация импульсов не встретится и в цифровом потоке какого-либо канала? Конечно, такое может произойти, но только не так часто. Вероятность данного события чрезвычайно мала. А вот синхросигнал такой структуры встречается с завидной регулярностью — через каждые 250 мкс. Это его свойство — повторяемость — используется для "узнавания". Необходимо каждую принятую кодовую комбинацию сравнивать с комбинацией синхросигнала, которая на приеме известна и хранится в ячейке памяти. Специальное устройство следит за тем, регулярно ли появляется такая комбинация. Если через каждые 250 мкс, то все в порядке — мы имеем дело с синхросигналом. Решение принимается обычно после нескольких его повторений.
Синхронная цифровая иерархия (СЦИ), принципы формирования транспортных структур СЦИ
Дата добавления: 2015-03-14; просмотров: 1767;