Графическое определение передаточного отношения.
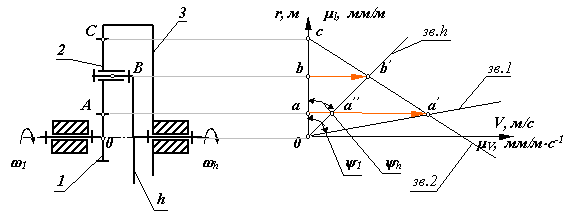
В системе координат ri0V построим треугольники распределения линейных скоростей звеньев. Для этого из точки А с ординатой r1 в выбранном произвольном масштабе  , мм/м*с-1 отложим отрезок a-a'. Через конец этого отрезка и начало координат проведем прямую, которая определит распределение скоростей для точек звена 1, лежащих на оси ri. Эта прямая образует с осью ri угол
, мм/м*с-1 отложим отрезок a-a'. Через конец этого отрезка и начало координат проведем прямую, которая определит распределение скоростей для точек звена 1, лежащих на оси ri. Эта прямая образует с осью ri угол  1. Так как в точке С скорости звеньев 2 и 3 равны между собой и равны нулю, то соединяя точку С прямой с точкой a', получим линию распределения скоростей для звена 2. Так как точка принадлежит звеньям 2 и h, то ее скорость определяется по лучу с-a' для радиуса равного rB = (r1+r2), что в масштабе , мм/м*с-1 соответствует отрезку bb'. Соединяя точку b' с началом координат прямой, найдем линию распределения скоростей для водила. Эта линия образует с осью ri угол h. Передаточное отношение планетарного механизма определенное по данным графическим построениям можно записать так:
1. Так как в точке С скорости звеньев 2 и 3 равны между собой и равны нулю, то соединяя точку С прямой с точкой a', получим линию распределения скоростей для звена 2. Так как точка принадлежит звеньям 2 и h, то ее скорость определяется по лучу с-a' для радиуса равного rB = (r1+r2), что в масштабе , мм/м*с-1 соответствует отрезку bb'. Соединяя точку b' с началом координат прямой, найдем линию распределения скоростей для водила. Эта линия образует с осью ri угол h. Передаточное отношение планетарного механизма определенное по данным графическим построениям можно записать так:

2. Однорядный механизм с одним внутренним и одним внешним зацеплением.
|
Дата добавления: 2015-03-14; просмотров: 1159;