В случае кинетостатической определимости плоский механизм не должен иметь избыточных связей.
Наличие избыточных связей увеличивает число неизвестных составляющих реакций, и для их определения дополнительно к уравнениям кинетостатики должны быть составлены уравнения перемещений (деформаций).
Для пространственной схемы механизма это условие запишется в виде:
6n = 
или 6n = 
Система сил для пространственной схемы должна быть пространственной, а для плоской схемы система действующих сил должна быть плоской.
Рассмотрим силовой расчет кривошипно-ползунного механизма компрессора.
Исходными данными являются:
1. Кинематическая схема механизма;
2. Массы и моменты инерции звеньев, положение их центров масс  ;
;
3. Угловая скорость  и угловое ускорение
и угловое ускорение  звена 1;
звена 1;
4. Сила сопротивления приложенная к поршню  ;
;
5. Силы тяжести всех звеньев.
Установим последовательность выполнения силового расчета.
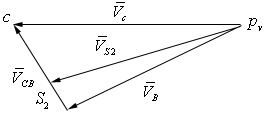
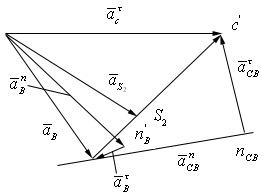
Для рассматриваемого положения механизма записываем векторные уравнения скоростей и ускорений, строим планы скоростей и ускорений. Далее определяем значения главных векторов сил инерции (  ,
,  ) и главных моментов сил инерции (
) и главных моментов сил инерции (  ,
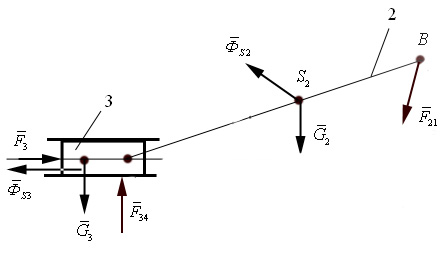
,  ) и наносим их на расчетную схему механизма рис. 9.5.
) и наносим их на расчетную схему механизма рис. 9.5.
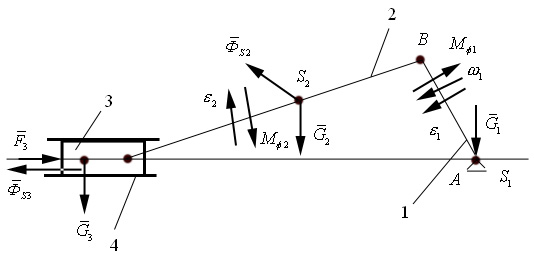 |
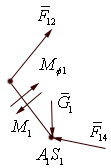
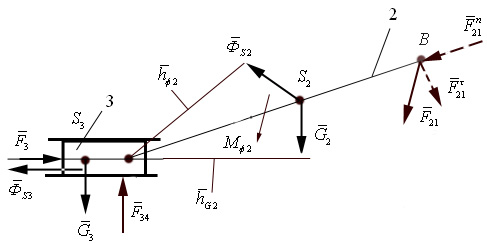
Требуется определитьвнутренние силы (реакции) во всех кинематических парах и момент приложенный к кривошипу.
Рис. 9.5
Определение скоростей

| Определение ускорений


|
| 
|
Разобьём механизм на структурную группу, составленную звеньями 2 и 3 и первичный механизм:
| 
|
Дата добавления: 2015-03-14; просмотров: 1499;