Блок управления
Блок управления приводится в действие отдельным микропроцессором со специальным программным обеспечением для контроля и управления. Его конфигурацию настраивают на определенное количество контуров управления технологическим процессом, и он контролирует часть процесса. В составе установки существует несколько блоков управления, которые распределены в разные места.
Каждый блок управления имеет несколько виртуальных приборов и может имитировать различные типы контроллеров, индикаторов и приборов других типов, в том числе:
- PID-контроллер,
- Контроллер соотношения,
- Контроллер включения/выключения,
- Индикатор,
- Переключатель,
- Селекторный переключатель,
- Логическая схема управления
- и многие другие.
Каждый прибор имеет графическое отображение в виде панели на операторской станции. С помощью панели контроллера оператор может отслеживать и выполнять такие операции, как:
- отслеживание параметров контроллера,
- отслеживание статуса контроллера,
- изменение режима управления, например, ручного, автоматического или каскадного режима,
- изменение настройки в случае автоматического режима,
- изменение выхода контроллера в ручном режиме
При этом следует заметить, что блок управления не имеет аппаратных контроллеров, зато на нем установлено программное обеспечение, которое имитирует различные типы контроллеров. Его можно с легкостью настроить на различные контуры управления процессами с помощью программных средств конфигурации, поставляемых поставщиком системы DCS.
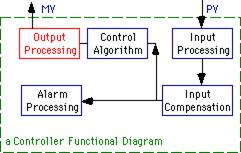
Как правило, блок управления имитирует 100 - 300 приборов, в зависимости от изготовителя DCS. Чтобы понять функциональные возможности блока управления, допустим, что он состоит из одного прибора – PID-контроллера. Измеренное значение PV от датчика в составе установки сначала преобразуется из аналогового в цифровой сигнал в блоке ввода/вывода (I/O). Этот цифровой сигнал PV подключается к PID-контроллеру в виде входного сигнала PV. Оператор в диспетчерской указывает уставку, когда контроллер находится в автоматическом режиме. Контроллер выполняет алгоритм управления, вычисляя свой выход, MV. Цифровой выход, MV, преобразуется в аналоговый электрический сигнал в блоке I/O и передается на установку, чтобы привести в действие регулирующий клапан.
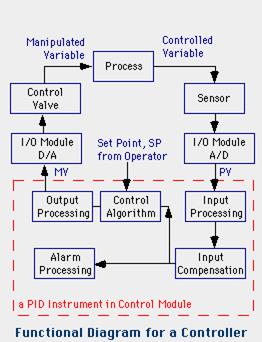
Помимо исполнения алгоритмов управления, блок управления также выполняет многие другие функции, в том числе следующие:
- Обработка входного сигнала,
- Компенсация входа,
- Обработка тревожных сигналов и
- Обработка выходного сигнала.
Обработка входного сигнала
Сигналы установки от датчиков и передатчиков требуют дополнительной обработки, чтобы скорректировать измеренные значения.
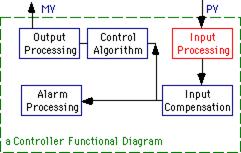
Такая обработка требуется из-за помех и ограничений измерительных устройств в составе установки. В зависимости от типа датчиков, передатчиков и измеренных значений могут потребоваться различные типы обработки входного сигнала, в том числе:
- Линеаризация,
- Извлечение квадратного корня,
- Цифровая фильтрация.
Большинство датчиков расхода измеряют перепад давления на измерительной диафрагме, которую необходимо откалибровать для получения расхода. Перепад давления на измерительной диафрагме и соответствующий ему расход не отвечают линейной зависимости. Расход пропорционален квадратному корню перепада давления. Таким образом, сигнал измерения расхода требует линеаризации с применением функции извлечения квадратного корня во время обработки входного сигнала.
Компенсация входа
Измерительные устройства обычно проходят калибровку, чтобы выдавать точные измерения при определенных условиях. Если фактические условия отличны, то измеренное значение требует корректировки или компенсации.
В качестве примера возьмем сигнал расхода. Расход измеряется путем измерения перепада давления на измерительной диафрагме и калибруется при определенной температуре и давлении или плотности.
- Для измерения расхода газа входной сигнал расхода требует компенсации с учетом фактических температуры и давления.
- Для измерения расхода жидкости входной сигнал расхода требует компенсации с учетом фактических температуры и плотности.
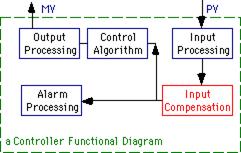
Подобный тип обработки входного сигнала называется компенсацией входа.
Обработка выходного сигнала
Выходной сигнал обычно отправляется на установку, чтобы манипулировать рабочими устройствами, в основном, регулирующими клапанами. Таким образом, ему необходима обработка для надлежащего функционирования регулирующих клапанов, в том числе:
- Нижний и верхний предел выхода,
- Скорость изменения выхода или предел скорости выхода.
Нижний и верхний предел выхода используются для обеспечения безопасности процесса, чтобы ограничивать положение клапана в определенном диапазоне.
Ограничение скорости выхода применяется, чтобы гарантировать, что регулирующий клапан не будет перемещаться быстрее определенного предела. Данный предел применяется для обеспечения безопасности процесса, а также из-за определенных ограничений механических перемещений клапана.
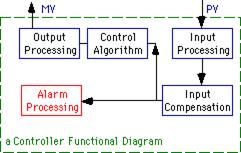
Обработка сигналов тревоги
Обработка тревожных сигналов выполняется для определения аномальных сигналов процесса и оповещения оператора. Статус тревоги обычно отображается в различных местах операторской станции.
Распространенные типы тревоги включают:
- Верхнее PV и нижнее PV,
- Отклонение,
- Скорость изменения PV или предел скорости,
- Статус входного сигнала.
- Тревога верхнего PV генерируется, когда значение PV превышает определенный верхний предел
- Тревога нижнего PV генерируется, когда значение PV опускается ниже определенного нижнего предела
- Тревога об отклонении генерируется, когда значение PV отклоняется от уставки на определенный предел отклонения.
- Тревога скорости изменения PV генерируется, когда значение PV меняется со скоростью, превышающей определенный предел скорости.
Дата добавления: 2014-12-02; просмотров: 1171;