Билет номер 31
7.4.1. Вертолеты
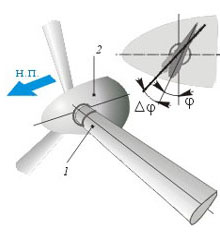
Как уже отмечалось (см. раздел 4.4), движителем вертолета (устройством, преобразующим работу двигателя в работу, обеспечивающую движение) является воздушный винт. Воздушный винт (пропеллер - англ. propeller, от лат. propello - гоню, толкаю вперед) создает при вращaении аэродинамическую силу Та (рис. 7.61,а),

| | Рис. 7.61. К объяснению принципа работы винта
| которая служит силой тяги у самолета с винтомоторной силовой установкой или подъемной силой и силой тяги у вертолета. Лопасть винта можно рассматривать как крыло, совершающее вращательное (относительно оси втулки винта) и поступательное (в направлении, перпендикулярном плоскости вращения) движение. При этом на любой элементарный участок лопасти длиной dr(спрофилированный аналогично профилю крыла) будет набегать воздушный поток с истинной скоростью W (рис. 7.61,б), определяемой как геометрическая сумма окружной скорости вращения U=ωr=2πrn и скорости потока V вдоль оси винта. Здесь используются обозначения:
| ω
| -
| угловая скорость вращения винта, рад/с;
| | n
| -
| частота вращения (число оборотов винта в секунду), с-1;
| | V
| -
| скорость потока, проходящего через плоскость вращения винта (скорость полета в направлении полета винта), м/с.
|
При работе винта на месте (в режиме вентилятора) V - это скорость подсасывания струи винтом. Таким образом, поток обтекает элемент лопасти под углом атаки α, отличающимся от углаустановки (установочного угла сечения винта) φ на угол β, называемый углом притекания струи. Естественно, что при работе винта на месте a = j. На каждом элементе лопасти винта возникает элементарная аэродинамическая сила, которую по аналогии с аэродинамической силой крыла можно записать в виде
| где
| CRa
| -
| коэффициент полной аэродинамической силы элемента лопасти;
| | | dS
| -
| площадь элемента лопасти в плане.
| |
Проекция этой силы на направление полета dТа называется элементарной силой тяги. Проекция на плоскость вращения винта dXа, препятствующая его вращению, называется элементарной силой сопротивления вращению. Система элементарных сил приводится к равнодействующим силам: Ta, которая является силой тяги винта, и паре сил Xa, момент которых относительно оси винта препятствует его вращению и называется моментом торможения или моментом сопротивления вращению винта. Для преодоления этого момента к валу винта должен быть приложен крутящий момент от двигателя. Так же, как и аэродинамические силы крыла, сила тяги винта зависит от его геометрических параметров: формы профилей, из которых набрана лопасть, и распределения их по размаху лопасти (крутки лопасти); формы в плане и размеров лопасти (длины CAX лопасти, диаметра винта и, соответственно, площади, ометаемой винтом); числа лопастей винта.
Изменять силу тяги винта можно изменением частоты вращения (числа оборотов) винта и изменением угла установки лопасти φ. При увеличении числа оборотов увеличивается не только истинная скорость обтекания лопасти W за счет увеличения окружной скорости U (см. рис. 7.61,б), но и угол атаки лопасти α.
К увеличению угла атаки лопасти приводит и увеличение угла установки лопасти j или, как принято говорить, увеличение шага винта H (см. рис. 7.61,а).
Теоретический (геометрический) шаг винта - путь Н, который прошел бы в осевом направлении винт за один оборот, если бы он ввинчивался в воздух, как в гайку. Из развертки пути, пройденного за один оборот концом лопасти при постоянном по размаху лопасти угле установки, получим tgφ=H/(2πR) и H=2πRtgφ.
Лопасти винтов имеют переменный по размаху угол φ (аэродинамическую и геометрическую крутку). Поэтому условно шагом винта называют шаг расчетного сечения лопасти, отстоящего от оси вращения на расстояние, равное 75% размаха лопасти. Конструкция винтов изменяемого шага(ВИШ) (рис. 7.62)
| | Рис. 7.62. Винт изменяемого шага
| позволяет изменять шаг винта (угол установки лопастей φ), поворачивая с помощью специальных устройств или механизмов лопасть относительно продольной оси А-А за ее корневую часть (комель лопасти) 1, шарнирно закрепленную во втулке винта 2.
Несущий винт (НВ) вертолета. Выше мы рассмотрели работу воздушного винта в условиях осевой обдувки (скорость набегающего потока перпендикулярна плоскости вращения винта). В этих условиях НВ вертолета работает только на режимах висения и вертикального взлета и посадки. На всех остальных режимах полета НВ вертолета работает в условиях косой обдувки, когда характер обтекания лопастей несущего винта периодически изменяется.
Так, в горизонтальном полете скорости воздушного потока, набегающего на лопасти четырехлопастного несущего винта (рис. 7.63), меняются в зависимости от азимута (араб. ас-сумут, мн. число от ас-самт - путь, направление) - углового положения лопасти относительно вектора скорости набегающего потока (направления полета).
Для произвольного азимутального положения лопасти, определяемого углом ψ, скорость обтекания концевого сечения лопасти, определяющая действующие в сечении аэродинамические силы,

| где
| ω
| -
| угловая скорость вращения винта;
| | | 
| -
| окружная скорость концевого сечения;
| | | | Vsinψ
| -
| составляющая скорости воздушного потока от поступательного движения лопасти вместе с вертолетом.
| | Составляющая Vcosψ направлена вдоль плоскости лопасти и не участвует в создании аэродинамической подъемной силы.
На рис. 7.63 показаны эпюры
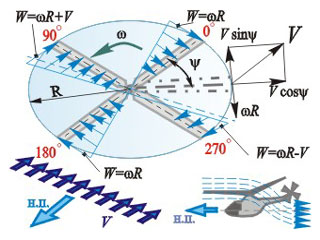
| | Рис. 7.63. Распределение скоростей на лопастях несущего винта
| распределения скоростей обтекания по размаху лопастей и указаны суммарные скорости концевых сечений лопастей в характерных азимутальных положениях.
Периодичность аэродинамических сил и, соответственно, моментов этих сил на втулке винта при жестком креплении лопасти к втулке винта приводит к вибрации и тряске.
Для уменьшения этих неблагоприятных явлений применяют различные способы крепления лопастей к втулке, через которую при механическом приводе передается крутящий момент от двигателя и которая передает на фюзеляж вертолета аэродинамические и инерционные силы и моменты, возникающие на лопастях несущего винта.
Широко распространенным способом (рис. 7.64) является крепление лопасти 1 несущего винта к втулке 5 при помощи шарниров: осевого шарнира(ОШ) 2, за счет которого с помощью рычага изменения шага лопасти 6 можно изменять угол ее установки Δφ; вертикального (ВШ) 3 и горизонтального (ГШ) 4 шарниров.
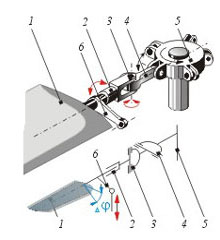
| | Рис. 7.64. Шарнирное крепление лопасти несущего винта
| В режимах осевой обдувки несущего винта (висение, вертикальный подъем и спуск вертолета) (рис. 7.65) при шарнирном креплении под действием силы тяжести лопасти Gл , аэродинамических сил (тяги лопасти Yа л и лобового сопротивления Yа л ) и центробежной силы F (которая значительно больше остальных сил) лопасть сама находит равновесное положение, при котором сумма моментов сил, действующих на лопасть, относительно шарниров равна нулю.
Таким образом, силовое воздействие лопасти на втулку уменьшается по сравнению с жестким креплением лопасти к втулке. Лопасти при этом отклоняются относительно ВШ в горизонтальной плоскости на угол ζ (угол отставания лопасти) и относительно ГШ на угол β в вертикальной плоскости, в результате чего движение лопастей происходит по поверхности конуса. Угол βпоэтому называется углом конусности (или углом взмаха). Он тем больше, чем больше сила тяги винта (подъемная сила Ya) при неизменной частоте вращения.
Шарнирная втулка несущего винта - один из сложнейших агрегатов вертолета, поэтому конструкторы непрерывно ищут новые решения. Появились втулки НВ с совмещенными горизонтальным и вертикальным шарнирами и втулки со сферическими эластомерными подшипниками (от греч. elastos - гибкий, тягучий), которые за счет эластичности полимерных элементов конструкции обеспечивают необходимые углы установки лопастей НВ.
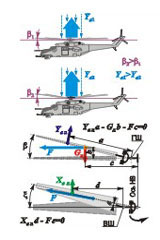
| | Рис. 7.65. К объяснению действия шарниров крепления лопасти
| Перемещение вертолета в вертикальном направлении происходит под действием силы тяги (подъемной силы) несущего винта. Увеличивать или уменьшать эту силу можно изменением мощности двигателя и одновременным изменением угла установки всех лопастей несущего винта (изменением общего шага винта).
Для перемещения вертолета в горизонтальной плоскости необходимо наклонить ось конуса, по поверхности которого происходит движение лопастей несущего винта, в направлении движения.
В этой ситуации при косой обдувке лопасти несущего винта в процессе вращения обтекаются потоком с различными скоростями (см. рис. 7.63), и, следовательно, на них действуют изменяющиеся в зависимости от азимутального положения лопасти аэродинамические силы. При этом возникает маховое движение лопасти в вертикальной плоскости относительно горизонтального шарнира, причем амплитуда маховых движений лопастей возрастает с увеличением скорости полета.
Колебательные движения лопастей относительно горизонтального шарнира приводят к появлению в плоскости вращения лопасти (горизонтальной плоскости) сил, стремящихся в зависимости от направления махового движения лопасти (вверх или вниз) ускорить или замедлить вращение лопасти, так называемых кориолисовых сил, которые совместно с переменными по азимуту силами сопротивления вызывают колебательные движения лопасти в горизонтальной плоскости относительно вертикального шарнира.
Наличие горизонтального и вертикального шарниров позволяет за счет махового и колебательного движения лопасти значительно уменьшить неравномерность силового воздействия лопасти на втулку при поступательном движении вертолета и уменьшить вибрации и тряску.
Изменение (в зависимости от азимутального положения лопасти) значений аэродинамических сил на лопастях несущего винта можно уменьшить и за счет изменения угла установки лопасти в зависимости от ее азимутального положения (изменением циклического шага несущего винта). В этом случае угол установки лопасти автоматически увеличивается (поворотом лопасти в осевом шарнире), когда результирующая скорость движения лопасти уменьшается; при увеличении результирующей скорости лопасти угол установки лопасти уменьшается.
Управляя циклическим шагом несущего винта таким образом, чтобы на лопасти, направленной в сторону желаемого горизонтального перемещения вертолета, уменьшался угол установки, а на лопасти, направленной в обратную сторону, угол установки лопасти увеличивался, мы соответственно изменим подъемные силы лопастей, и ось конуса винта (и, соответственно, сила тяги) отклонится в необходимом направлении.
Изменение общего и циклического шага несущего винта вертолета с шарнирным креплением лопастей производится при помощи автомата перекоса, принципиальная схема которого представлена на рис. 7.66,а.
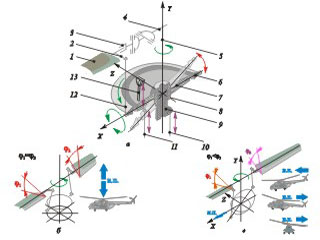
| | Рис. 7.66. К объяснению действия автомата перекоса
| Автомат перекосарасположен на валу (оси вращения) 5 несущего винта непосредственно под его втулкой 4 и представляет собой универсальный шарнир, внешнее вращающееся кольцо 6 которого может перемещаться вверх и вниз вдоль оси вращения несущего винта и наклоняться относительно любой оси, лежащей в плоскости, перпендикулярной оси вращения 5.
Внешнее кольцо 6 является обоймой шарикоподшипника и вращается одновременно с валом 5 несущего винта за счет поводков (тяг) 12, соединяющих кольцо с рычагами управления шагом 2лопастей 1 винта. Кольцо 7, являющееся внутренней обоймой шарикоподшипника, неподвижно в плоскости вращения внешнего кольца, однако эта плоскость может изменять свое положение в пространстве, поворачиваясь за счет сферического шарнира 8, которым внутреннее кольцо 7 подвижно соединяется с ползуном 9, способным перемещаться вдоль вала 5.
При перемещении ползуна с помощью тяги 10 за счет одновременного перемещения поводками 12рычагов 2 управления шагом все лопасти несущего винта поворачиваются в осевых шарнирах 3 на одинаковые углы, которые при горизонтальном положении плоскости внешнего кольца не изменяются по азимуту в процессе вращения несущего винта. Так осуществляется управлениеобщим шагом винта(рис. 7.66,б), которое с одновременным изменением мощности двигателя изменяет силу тяги несущего винта и обеспечивает режимы висения, вертикального взлета, набора высоты и посадки.
При отказе двигателя он специальной муфтой свободного хода автоматически отключается от несущего винта, а общий шаг несущего винта устанавливается таким образом, чтобы обеспечить безопасное вертикальное снижение и посадку нарежиме авторотации (самовращения) несущего винта. Объединенное управление системой "общий шаг несущего винта - двигатель" летчик осуществляет рычагом "шаг-газ", который связан проводкой управления с ползуном автомата перекоса и регулятором насоса подачи топлива в двигатель.
Внешнее кольцо 6 автомата перекоса (см. рис. 7.66,а) с помощью тяги 11 можно наклонить относительно оси Z-Z, а с помощью тяги 13 - относительно оси X-X. В этом случае поводки 12, связывающие внешнее вращающееся кольцо 6 с рычагами 2 управления шагом, в процессе вращения винта будут циклически (рис. 7.66,в) изменять по азимуту шаг лопастей от φ1 = φmin в направлении полета до φ2 = φmaxв противоположном направлении.
Управление циклическим шагом летчик осуществляет с помощью ручки продольно-путевого управления, движение которой вперед-назад или вбок приводит к аналогичному перемещению вертолета.
Здесь уместно отметить, что автомат перекоса, который является важнейшим агрегатом каждого вертолета, изобрел в 1911 г. Б.Н. Юрьев, бывший в то время студентом и работавший под руководством Н.Е. Жуковского в Воздухоплавательном кружке Московского технического училища (впоследствии - МВТУ).
Несущий винт 1 вертолета (рис. 7.67), управление которым производится с помощью автомата перекоса 3, приводится в действие двигателем 5 через главный редуктор 4 (от лат. reduktor - отводящий назад, приводящий обратно).
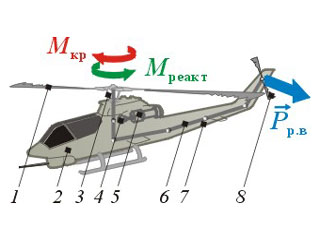
| | Рис. 7.67. Вертолет одновинтовой схемы с релевым винтом
| Редуктор служит для уменьшения частоты вращения несущего винта по сравнению с частотой вращения вала двигателя и, следовательно, увеличения крутящего момента на валу несущего винта, чтобы преодолеть момент сил сопротивления несущему винту. При передаче крутящего моментаМкр несущему винту нафюзеляж вертолета 2действует реактивный крутящий момент Мреакт, который стремится развернуть фюзеляж в сторону, противоположную направлению вращения несущего винта. Рулевой винт8, установленный на хвостовой балке 7, приводится во вращение от двигателя черезтрансмиссию (от лат. transmissio - передача) 6. При вращении рулевого винта возникает аэродинамическая сила Pр.в , которая уравновешивает реактивный крутящий момент.
Летчик с помощью ножного управления воздействует на механизм изменения шага рулевого винта, изменяет значение силы Pр.в и разворачивает вертолет относительно вертикальной оси, осуществляя путевое управление.
Проблема парирования реактивного момента от движителя-винта возникает и на самолетах с винтомоторной силовой установкой. Однако при одинаковой мощности двигателя W крутящий момент на валу Мкр и, соответственно, реактивный момент (Мреакт = W/ω) у вертолета значительно больше, чем ω самолета, поскольку частота w вращения винта самолета порядка 2000-3000 мин-1(об/мин), а у вертолета - 200-500 мин-1. Поэтому эта проблема даже для одномоторных винтовых самолетов решается достаточно просто, например за счет практически незаметной аэродинамической асимметрии крыльев, создающих постоянный кренящий момент, обратный реактивному моменту винта.
Возникающий от несущего винта вертолета большой реактивный момент требует специальных технических решений для его компенсации (т. е. для балансировки вертолета относительно оси 0Y), и эти решения фактически определяют облик (аэродинамическую схему) вертолета (рис. 7.68).
У вертолетов двухвинтовой схемы реактивные моменты от несущих винтов компенсируются за счет противоположного направления их вращения.
При реактивном приводе несущего винта момент от сил сопротивления лопастей (момент сопротивления вращению) преодолевается моментом силы тяги реактивных двигателей, установленных на концах лопастей. Это могут быть реактивные двигатели, к которым через втулку и лопасти несущего винта подается топливо и сжатый воздух (горячий цикл). Это могут быть и просто сопла, к которым подается сжатый воздух (холодный цикл).
Поскольку в этих случаях несущий винт свободно подвешен на валу, то на корпус вертолета передается только относительно небольшой момент сил трения в подвеске несущего винта.
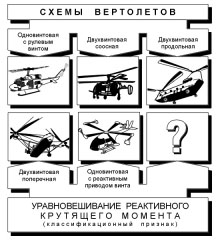
| | Рис. 7.68. Классификация вертолетов по способу компенсации реактивного момента несущего винта
| Максимальная скорость современных вертолетов, выполненных по чисто вертолетной схеме, ограничена возникновением срыва потока на лопастях несущего винта, в том числе и волнового срыва при достижении концевыми сечениями лопастей скоростей, соответствующих критическому числу М. Поэтому она не превышает 330-350 км/ч.
Отодвинуть появление срыва потока на лопастях до скоростей 350-400 км/ч и, соответственно, увеличить скорость вертолета можно, если применить на вертолете крыло самолетного типа, которое в горизонтальном полете создает 30-40% необходимой подъемной силы и разгружает таким образом несущий винт, позволяя лопастям несущего винта работать на меньших углах атаки.
Увеличить скорость ЛА с несущим винтом и крылом до 400-500 км/ч можно, если на режимах горизонтального полета передать функцию движителя от несущего винта к специальным тянущим (или толкающим) винтам или реактивным двигателям. В этом случае можно использовать увеличенную скорость полета для самовращения несущего винта и без подвода мощности к нему создавать с его помощью дополнительную подъемную силу. Такие ЛА называются винтокрылами. По параметрам дальности и скорости полета они приближаются к транспортным турбовинтовым самолетам, уступая им, однако, по себестоимости перевозок. Тем не менее уникальные характеристики вертолетов и винтокрылых ЛА определили их широкое применение и интенсивные научно-исследовательские и проектно-конструкторские работы по разработке ЛА этого типа.
Так же интенсивно ведутся работы по разработке ЛА вертикального (укороченного) взлета и посадки невертолетного типа.
|