Управляемые (гибкие) линии переменного тока
Передача и распределение электрической энергии осуществляется в настоящее время в основном по линиям переменного тока. Интенсивное строительство этих линий во второй половине XX в. в развитых странах привело к тому, что строить новые линии стало весьма затруднительно, главным образом, из-за проблем, связанных с отводом земли. В то же время продолжающийся рост нагрузки в сложнозамкнутой сети требует увеличения пропускной способности существующих линий электропередач и управления их режимами. В таких сетях возможны режимы, когда требуется принудительное распределение мощности между отдельными линиями. Поэтому в последние годы интенсивно обсуждается вопрос о возможных путях решения этой задачи.
В настоящее время разработан ряд устройств, позволяющих изменять сопротивление линии переменного тока и управлять потоком мощности по ней, причем выполнять это практически безынерционно. Линии, оснащенные такими устройствами, получили название гибких линий. В англоязычной литературе они называются «Flexible Alternating Current Transmission Systems — FACTS».
Гибкие линии позволяют:
повысить пропускную способность существующих линий вплоть до теплового предела по нагреву проводов;
обеспечить принудительное распределение мощности между линиями в сложной неоднородной сети в соответствии с требованиями диспетчера;
повысить устойчивость системы.
Следует отметить, что начало работ в этом направлении было положено еще в 60-х годах XX в., когда в ряде стран, в том числе и нашей, были развернуты исследования по статическим источникам реактивной мощности, обладающим большим быстродействием. Эти устройства позволяли стабилизировать напряжение в отдельных узлах электроэнергетических систем и тем самым способствовать повышению пропускной способности линий электропередач и устойчивости систем. Были исследованы различные типы таких устройств и созданы опытно-промышленные образцы некоторых из них.
Однако широкому внедрению этих устройств в то время препятствовало отсутствие необходимой элементной базы — силовых электронных ключей (запираемых тиристоров, силовых транзисторов). В настоящее время такие полупроводниковые приборы разработаны и имеют достаточно высокие параметры. Это позволяет создать устройства, которые могут применяться для решения многих задач электроэнергетики.
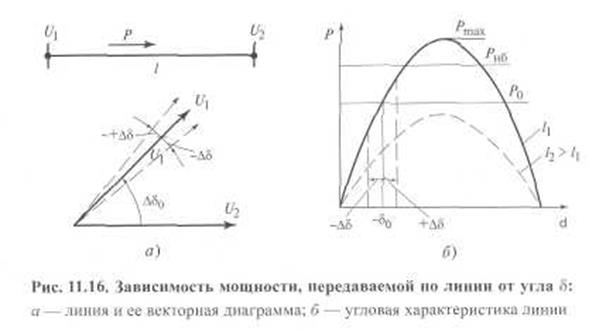
Известно, что активная мощность, передающаяся по линии переменного тока, определяется следующим выражением (без учета активных сопротивлений проводов)
Ро = U1 U2 sinδ/ xл
где U1 и U2 — напряжения по концам линии, или точнее, в тех узлах сети, к которым она подключена; хл — реактивное сопротивление линии; δ— фазовый угол сдвига между напряжениями U1 и U2.
На рис. 11.16 приведены векторная диаграмма и угловая характеристика линии — зависимость передаваемой мощности от угла δ, которая представляет собой синусоиду. Амплитуда этой синусоиды Рмах определяет максимальную мощность, которая может быть передана по линии в соответствии с ее электромагнитными свойствами; величина Рнб — наибольшая мощность, передаваемая по линии с учетом коэффициента запаса по статической устойчивости связываемых систем. Здесь же пунктиром показана угловая характеристика для линии большей длины; из нее следует, что максимальная мощность, которая может быть передана по такой линии, уменьшается. На рис. 11.16 также указаны величины Ро и δ0 — мощность и угол исходного режима.
Необходимо отметить, что активная мощность всегда передается от опережающего вектора напряжения к отстающему.
Отсюда следует, что управление передаваемой по линии мощностью может осуществляться следующими путями:
изменением в допустимых пределах и стабилизацией на заданном уровне напряжений в узлах сложной сети, к которым подсоединена
линия; регулирование этих напряжений позволяет изменять мощность, передаваемую по линии;
изменением реактивного сопротивления линии;
изменением угла фазового сдвига между напряжениями по концам линии;
комбинацией этих способов.
В соответствии с этим все устройства, способные управлять мощностью и пропускной способностью линий переменного тока, могут быть разделены на четыре типа.
К первому из них относятся устройства, предназначенные для регулирования и стабилизации напряжения в соответствующих узлах электрической сети или же в промежуточных точках линий.
Ко второму типу устройств относятся устройства, позволяющие изменять реактивное сопротивление линии. Поскольку последнее является, главным образом, индуктивным сопротивлением, то оно может быть изменено путем последовательного включения в линию емкости или последовательного введения в линию напряжения, эквивалентного напряжению на этой емкости.
К третьему типу устройств относятся устройства, предназначенные для изменения угла фазового сдвига между напряжениями по концам линии (угла δ). Такой сдвиг может быть выполнен путем введения в каждую фазу линии дополнительного регулируемого напряжения ΔUК, сдвинутого на угол ±90 град, по отношению к напряжению данной фазы. Результирующее напряжение на выходе такого устройства сдвинется на угол, определяемый величиной вводимого напряжения, в сторону опережения или запаздывания. В результате угол δ будет увеличен или уменьшен. В первом случае это приведет к увеличению передаваемой по линии мощности, во втором — ее уменьшению.
К четвертому типу устройств, регулирующих мощность и пропускную способность линий переменного тока, относятся устройства, позволяющие осуществлять комбинированное воздействие на линию — регулировать напряжение по величине, изменять фазный угол между напряжениями по концам линии и сопротивление линии. Такое воздействие может быть осуществлено путем последовательного введения в линию некоторого дополнительного напряжения ΔUК, фаза которого по отношению к напряжению начала линии может изменяться от 0 до 360 эл. град.
Рассмотрим возможности технической реализации упомянутых выше типов устройств.
Устройства, способные решать некоторые из перечисленных выше задач, применяются в электроэнергетике давно. Однако они не вполне соответствуют современным требованиям. К ним относятся синхронные компенсаторы (СК), предназначенные для стабилизации напряжения в узлах электрической сети, к которым они подключены, и установки
продольной емкостной компенсации (УПК) линий, применяющиеся для уменьшения индуктивного сопротивления последних.
Синхронный компенсатор — синхронная машина, идентичная по конструкции синхронному генератору, но, в отличие от него, без турбины на одном с ним валу и, следовательно, без активной нагрузки. Синхронный компенсатор способен работать как в режиме генерации реактивной мощности (основной режим), так и ее потребления, и предназначен для стабилизации напряжения в узле электрической сети, к которому он подключен. Синхронные компенсаторы достаточно широко используются в электроэнергетических системах, однако для решения перечисленных выше задач они не вполне пригодны в силу относительно большой по сравнению с новыми устройствами электромагнитной инерционности, а также сложности изготовления и обслуживания.
Установки продольной компенсации также получили применение в электроэнергетике ряда стран для увеличения пропускной способности линий электропередач.
С этой целью в линию последовательно включается конденсатор с сопротивлением хс, которое, имея обратный знак по отношению к индуктивному сопротивлению линии, вычитается из последнего, в результате чего эквивалентное сопротивление линии уменьшается
Хэкв= Хл- Хс
что равноценно уменьшению длины линии.
На практике этот конденсатор представляет собой конденсаторную батарею (КБ), включенную последовательно в каждую фазу линии и изолированную от земли. Обычно сопротивление КБ выбирается так, чтобы компенсировалось не все индуктивное сопротивление линии, а лишь какая-то его часть. Эта компенсированная часть общего сопротивления линии, отнесенная к общему сопротивлению, называется степенью компенсации линии.
В рабочих режимах линии, особенно при ее малых нагрузках, напряжение на выводах КБ может повышаться к существенно превосходить допустимые пределы. Для избежания этого на выводы КБ обычно включаются шунтирующие реакторы.
До последнего времени УПК выполнялись нерегулируемыми, од/гаки для изменения пропускной способности данной линии в различных режимах и для перераспределения потоков мощности между линиями сложной сети требуется регулируемая продольная компенсация. Причем управление сопротивлением линии должно осуществляться в темпе процессов, происходящих в электроэнергетической системе. Поэтому ни СК, ни обычные УПК не могут рассматриваться в качестве средств для создания гибких линий.
Разработанные к настоящему времени приборы силовой электроники позволяют по-иному подойти к решению ряда задач электроэнергетики.
С их помощью могут быть созданы быстродействующие устройства, предназначенные для регулирования режимов электрических сетей.
В статических компенсаторах реактивной мощности, а также в фазоповоротных устройствах и регулируемых УПК в качестве регулирующего элемента используются тиристорные ключи, что придает этим устройствам высокое быстродействие. Это позволяет рассматривать их в качестве средств, пригодных для создания управляемых линий.
Статические компенсаторы реактивной мощности (СКРМ) основаны на использовании управляемых реакторов и конденсаторных батарей (рис. 11.17, а). При параллельном их включении мощность всего устройства равна алгебраической сумме мощностей реактора и КБ.
Q∑ = Qр - QКБ
Изменяя мощность реактора или КБ, можно изменять мощность всего устройства. При этом можно получить как генерацию, так и потребление реактивной мощности таким устройством.
Если рассматривать регулируемый реактор и нерегулируемую КБ, то при равенстве их установленных мощностей результирующая мощность будет равна нулю. В процессе регулирования реактора его мощность снижается, и результирующая мощность будет носить емкостной характер. В пределе, когда мощность реактора будет близка к нулю, в сеть будет выдаваться только мощность КБ, т.е. эта схема может работать только в режиме генерации реактивной мощности. Статическая характеристика такого устройства приведена на рис. 11.17, б.
Если данное устройств должно работать как в режиме генерации, так и потребления реактивной мощности, соотношение между мощностями реактора и КБ надо изменить. Мощность реактора в данном случае должна быть больше мощности КБ, например, Qр = 2QКБ. В этом случае
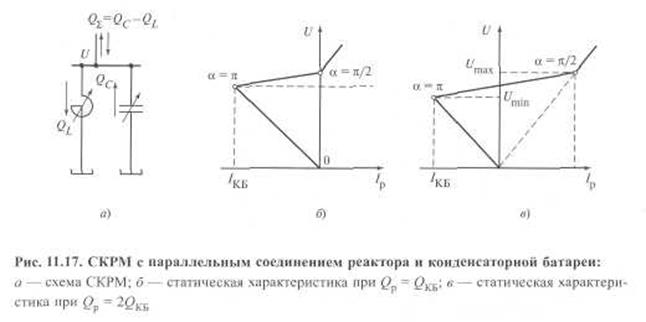
результирующая мощность будет изменяться в диапазоне - 1 ≤ Q∑ ≤1 (рис. 11.17, в).
Управление мощностью реактора может осуществляться плавно с помощью управляемого тиристорного ключа VS1—VS2 (рис. 11.18, а) или же путем подмагничивания всего сердечника реактора или отдельного его участка. Реактор, управляемый тиристорным ключом, обладает высокой скоростью изменения мощности и большой глубиной регулирования, что важно при резких изменениях напряжения сети.
Статические компенсаторы, где реактор регулируется с помощью тиристорного ключа, получили название статических тиристорных компенсаторов (СТК). Большим недостатком такого регулирования является несинусоидальность тока реактора, что вынуждает принимать меры по компенсации токов высших гармоник (рис. 11.18, б). Реакторы с подмагничиванием сердечника, разработанные в России, лишены этого недостатка и имеют высокую скорость изменения мощности и большую глубину регулирования. В настоящее время разработаны такие реакторы на напряжения до 500 кВ и мощностью до 60 мегавар на фазу. Они с успехом могут быть использованы для решения поставленной задачи.
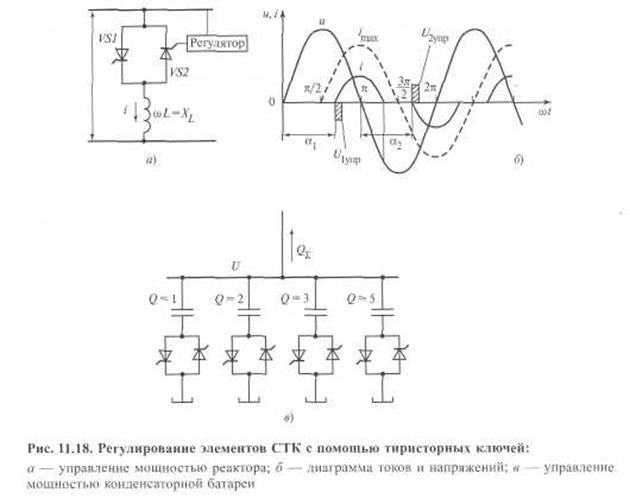
Регулирование мощности конденсаторной батареи может осуществляться только ступенчато, в отличие от плавного изменения мощности реактора. Для этого батарея должна быть разделена на несколько секций (3—4) разной мощности, и каждая из этих секций включается в работу с помощью тиристорного ключа (рис. 11.18, в). Секция остается в работе, пока в этом сохраняется потребность, при исчезновении этой потребности секция с помощью того же ключа выводится из работы. При этом обеспечивается высокое быстродействие и синусоидальность тока конденсаторной батареи.
При правильном выборе числа секций батареи и соотношения их мощностей можно обеспечить ступень регулирования мощности батареи 9— 10% и менее, что практически не будет сказываться на стабилизации напряжения в узле, где она подключена. Такие управляющие устройства для конденсаторных батарей были разработаны в нашей стране еще в 60-х годах, а в конце 80-х годов XX в. была выпущена опытная серия. За рубежом также был создан целый ряд СТК как с управляемым реактором, так и с управляемой конденсаторной батареей (США, Канада, Швеция и др.).
Управляемую продольную компенсацию линии можно осуществить, если изменить сопротивление конденсатора, включенного в линию. Это можно сделать двумя способами.
Первый из них предполагает включение или отключение отдельных секций, из которых состоит конденсаторная батарея, с помощью тиристорных ключей. При этом сопротивление КБ будет меняться и, следовательно, будет изменяться и степень компенсации линии.
По второму способу параллельно КБ включается управляемый реактор. Сопротивление реактора и диапазон его изменения выбираются таким образом, чтобы во всем этом диапазоне эквивалентное сопротивление схемы оставалось емкостным и большим, чем сопротивление собственно КБ. При изменении сопротивления реактора изменяется эквивалентное емкостное сопротивление такой схемы и, как следствие, степень компенсации линии. Управление таким реактором может осуществляться с помощью тиристорных ключей, как это показано выше, или другими способами. Такая схема получила применение на практике.
При изменении степени компенсации линии любым способом будут изменяться и напряжения на выводах КБ, оставаясь практически всегда выше допустимых значений. Поэтому на выводах КБ необходимо включить шунтирующие реакторы для снижения этих напряжений до допустимых значений. Очевидно, эти реакторы, также должны быть регулируемыми.
К третьему типу устройств, позволяющих управлять мощностью, передаваемой по линии, относятся устройства, способные изменять фазный угол между напряжениями по концам линии — фазоповоротные устройства (ФПУ). Такие устройства включаются в начале линии последовательно в каждую фазу.
Для создания ФПУ используется то обстоятельство, что напряжение каждой фазы сдвинуто по отношению к междуфазному напряжению двух других фаз на 90°. Схема ФТТУ состоит из двух трансформаторов (рис. 11.19). Один из них представляет собой возбуждающий трансформатор, первичные обмотки которого соединены в треугольник и включены на междуфазные напряжения линии. К его вторичным обмоткам при соответствующих сочетаниях фаз подключаются с помощью тиристорных ключей первичные обмотки второго трансформатора, который и является собственно фазосдвигающим. Вторичные обмотки последнего включены последовательно в каждую фазу линии. Соединения обмоток этих двух трансформаторов предусматривают сдвиг на электрический угол 90° между напряжением данной фазы и напряжением последовательной обмотки.
В результате напряжение в начале линии представляет сумму двух напряжений — напряжения фазы и напряжения последовательной обмотки, сдвинутого по отношению к напряжению фазы на электрический угол 90°.
Угол δ' между напряжениями по концам линии равен δ' = δ ± Δδ'.
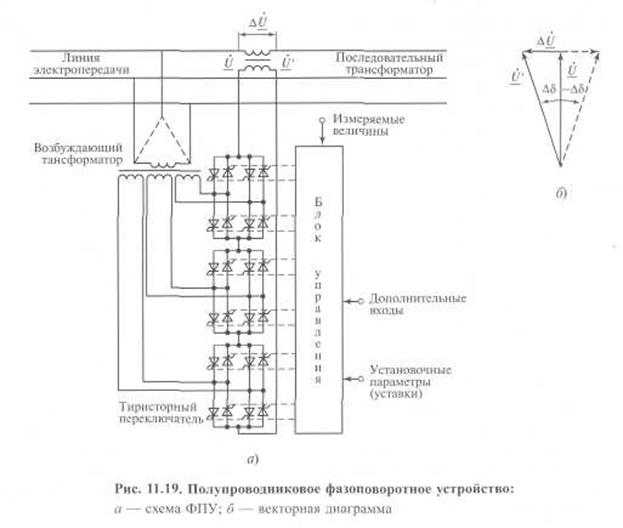
Угол Δδ может регулироваться как по значению, так и по знаку. Поэтому угол δ' может изменяться в желаемых пределах как в сторону увеличения, так и в сторону уменьшения, а значит будет изменяться и передаваемая по линии мощность. При увеличении угла δ' мощность будет увеличиваться, при уменьшении — уменьшаться. В то же время угол δ между напряжениями U1 и U2 будет оставаться неизменным.
Изменение угла Δδ производится средствами силовой электроники. Вторичная обмотка возбуждающего трансформатора состоит из нескольких отдельных секций, каждая из которых имеет разное количество витков, и, следовательно, разное напряжение. Каждая из этих секций подключена к двум тиристорным ключам, один из которых работает при одной полярности секции, другой — при ее противоположной полярности. Через тиристорные ключи каждая из секций связана с первичной обмоткой трансформатора, включенного последовательно в линию.
Если напряжения секций соотносятся, например, как 1 : 3 : 9, то, используя различные комбинации включенных секций с изменяющейся полярностью, можно иметь 27 различных ступеней регулирования угла сдвига выходного напряжения.
Блоки тиристорных ключей имеют систему управления, на вход которой подаются измеряемые величины (угол сдвига напряжений, мощность линий и др.) и заданные значения регулируемых величин (уставки), на ее выходе — система команд на включение соответствующих комбинаций тиристорных ключей.
Рассмотренные выше устройства — СТК, управляемая УПК, ФПУ — способны управлять мощностью и пропускной способностью линии, однако каждое из них способно решать только одну задачу.
Для создания управляемой (гибкой) линии необходимо использовать весь комплекс рассмотренных устройств, что скажется на экономических показателях линии и затруднит управление этим комплексом. Целесообразно иметь одно устройство, которое совмещало бы в себе выполнение всех упомянутых функций.
Преобразователи напряжения (ПН), возможность использования которых в электропередачах и вставках постоянного тока рассматривались выше, могут быть использованы и для создания гибких электропередач переменного тока. Такой преобразователь при отсутствии активной нагрузки в цепи постоянного тока может работать как управляемый источник или потребитель реактивной мощности. При этом он может быть включен параллельно в узле сети переменного тока, где требуется стабилизация напряжения, или в линию через последовательный трансформатор.
Преобразователь напряжения ПН через трансформатор включен параллельно линии в узле сети, к которому подключена линия (рис. 11.20, а). Здесь преобразователь выполняет роль синхронного компенсатора или СТК. В этом случае такой преобразователь называют параллельным регулятором потоков мощности или статическим компенсатором (СТАТКОМ). Отметим, что СТАТКОМ может использоваться не только в схемах управ-
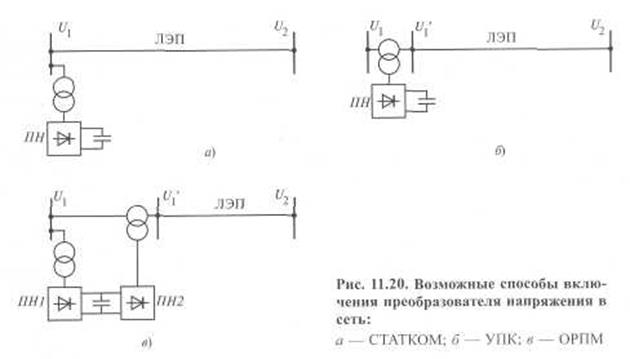
ляемых линий, но и в других случаях, когда требуется стабилизировать напряжение в узлах сети.
Другой путь использования ПН состоит в том, что переменное напряжение преобразователя вводится в линию последовательно с помощью трансформатора, одна из обмоток которого включена в линию последовательно, к другой подключен сам преобразователь (рис. 11.20, б). Причем, такое включение может быть выполнено в любой точке линии: в ее начале, конце или на промежуточной подстанции. Здесь преобразователь, работая в режимах генерации или потребления реактивной мощности с помощью последовательной обмотки трансформатора, вводит в линию некоторое регулируемое напряжение ΔUK, сдвинутое по отношению к току линии на ±90°, что эквивалентно последовательному включению емкости — УПК или индуктивности.
Изменение величины ΔUK будет эквивалентно изменению сопротивления хк и, следовательно, общего сопротивления линии, что в свою очередь будет увеличивать или уменьшать ее пропускную способность. Это изменение будет регулируемым в зависимости от режима системы. При этом величина ΔUK должна изменяться пропорционально току линии, аналогично изменению напряжения на конденсаторах УПК. В этом случае во всех режимах работы линии будет сохраняться заданная степень компенсации. При необходимости степень компенсации может изменяться по заданному закону, что также должно найти отражение в значении ΔUK. Поэтому в данном случае преобразователь должен быть оснащен регулятором, где входными величинами должны быть ток линии и закон изменения степени компенсации, а выходными — углы управления тиристорами преобразователя.
Введение в линию дополнительной индуктивности может оказаться полезным в режимах малых нагрузок для компенсации избыточной зарядной мощности линии. Отметим, что и в этом случае из-за указанного выше угла сдвига напряжения ΔUK по отношению к току, активная мощность преобразователя равна нулю.
Таким образом, подобное включение преобразователя в линию аналогично применению управляемой УПК. В этом случае преобразователь называют последовательным регулятором потоков мощности.
Еще один путь использования преобразователей напряжения для создания управляемых линий заключается в том, что фазоповоротное устройство также может быть создано путем введения в начале линии через последовательную обмотку трансформатора регулируемого напряжения ΔUK, сдвинутого на электрический угол ±90° по отношению к напряжению начала линии U1. Однако при этом будет появляться некоторая активная мощность, поскольку угол вводимого напряжения ΔUK no отношению к току будет отличаться от 90°. Значение этой мощности будет определяться углом между током и напряжением фазы, т.е. определяться режимом линии, а знак — знаком угла напряжения ΔUK. При сдвиге ΔUK на электрический угол +90° потребуется введение активной мощности в линию, при сдвиге на электрический угол -90° — отбор активной мощности. Поэтому, преобразователь, подключенный к линии, должен работать в одном случае в режиме инвертора, в другом — выпрямителя.
Для замыкания контура обмена активной мощностью между линией и шинами, куда она подключена, требуется другой преобразователь, включенный на те же шины и связанный с преобразователем, включенным последовательно в линию, по цепи постоянного тока (рис. 11.20, в). Эти два преобразователя ПН1 и ПН2 образуют вставку постоянного тока, подключенную к линии, но ее мощность меньше мощности, передаваемой по линии.
Если вводить в линию напряжение ΔUK, фаза которого будет изменяться от 0 до 360° по отношению к напряжению U1 то мы получим регулятор, который может выполнять все ранее перечисленные функции (рис. 11.21). Такой регулятор в литературе получил название объединенный регулятор потоков мощности (ОРПМ). В англоязычной литературе — UPFC (Unified Power Flow Controller).
Поскольку здесь, как и в случае ФПУ, фаза вводимого напряжения ΔUK по отношению к току линии будет отличаться от 90 град., то необходимы обмен активной мощностью между линией и шинами и, следовательно, вставка постоянного тока. Преобразователь ПН2 выполняет основную функцию этого регулятора путем введения в линию через последовательный трансформатор напряжения ΔUK. Величина этого напряжения может изменяться как по амплитуде, так и по фазе по отношению к току линии. Амплитуда и фаза его будут определять необходимые величины и знаки активной и реактивной мощности этого преобразователя. За счет изменения режима работы преобразователя ПН2 фаза вектора ΔUK может изменяться в диапазоне от 0 до 360°, поэтому изменяется и угол между напряжениями по концам линии и передаваемая по ней активная мощность.
Здесь можно отметить три наиболее характерных режима работы такого устройства: вектор ΔUK совпадает с напряжением U1, что означает режим регулятора напряжения; вектор ΔUK сдвинут по отношению к напряжению U1, на электрический угол +90°, что соответствует режиму ФПУ; вектор ΔUK сдвинут по отношению к току фазы линии на электрический угол ±90°, что равноценно режиму УПК (рис. 11.21).
Параллельный преобразователь ПH1 осуществляет подачу активной мощности к ПH2 или ее отвод по связи постоянного тока. Кроме того, он обеспечивает независимую поперечную компенсацию линии за счет генерации или потребления реактивной мощности, обеспечивая стабилизацию напряжения в узле сети, к которому подключена данная линия.
Таким образом, ОРПМ сочетает в себе свойства сразу трех аппаратов: статического компенсатора реактивной мощности, установки продольной компенсации и фазоповоротного устройства, что дает возможность регулировать потоки как активной, так и реактивной мощности. Поэтому ОРПМ может эффективно демпфировать качания мощности в линии и применяться для управления потоками мощности в слабых межсистемных связях.
Линии с ОРПМ в литературе называют линиями с векторным регулированием. На рис. 11.22 приведены режимные характеристики линии с векторным регулированием (линия напряжением 500 кВ и длиной 500 км). Регулятор ОРПМ включен в ее начале. Все зависимости, приведенные на этом рисунке, даны в относительных единицах, за базисные величины приняты номинальное напряжение и натуральная мощность линии. Из
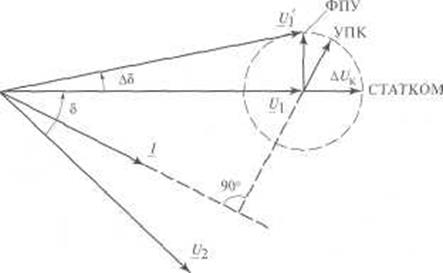
Рис. 11,21. Векторная диаграмма линии при действии объединенного регулятора потоков мощности
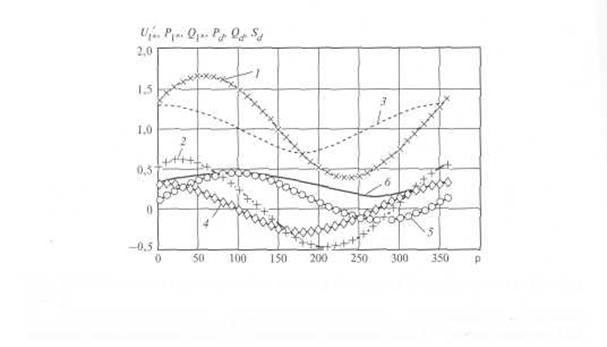
Рис. 11.22. Режимные характеристики линии с векторным регулированием в функции угла ρ:
1— активная мощность; 2 — реактивная мощность; 3 — напряжение; 4 — активная мощность преобразователя ПН2; 5 — реактивная мощность ПН2; 6— полная мощность ПН2
рис. 11.22 следует, что путем изменения угла ρ, т.е. поворота вектора ΔUK , можно в достаточно широких пределах регулировать передаваемую по линии активную мощность. Одновременно изменяются напряжение и реактивная мощность в начале линии. Здесь же показано изменение активной, реактивной и полной мощностей преобразователя ПН2 в процессе регулирования. Активная и реактивная мощности этого преобразователя знакопеременны, точка перехода активной мощности через ноль соответствует режиму УПК.
Устройства ОРПМ могут быть установлены на двух или нескольких системообразующих линиях различных классов напряжения. В этом случае управление перетоками мощностей по этим линиям должно осуществляться единым регулятором, что даст возможность оптимизировать распределение мощностей по этим линиям и повысить надежность работы электроэнергетической системы.
Гибкие линии могут играть важную роль в повышении динамической и результирующей устойчивости электроэнергетической системы. Благодаря быстродействию описанных выше устройств, они смогут изменять перетоки мощности по системообразующим связям и тем самым способствовать демпфированию колебаний роторов генераторов и повышению устойчивости системы.
Применение аппаратуры гибких линий позволит существенно изменить характеристики электроэнергетических систем и обойтись, в ряде случаев, без строительства новых линии для обеспечения передачи растущих потоков мощности, что стало в последнее время затруднительным в связи с целым рядом экономических, экологических и социальных проблем.
Контрольные вопросы
1. Назовите возможные области применения электропередач постоянного тока и дайте соответствующие обоснования.
2. Чем вставка постоянного тока отличается от электропередачи постоянного тока? Назовите возможные области применения вставок постоянного тока.
3. Чем режим выпрямителя отличается от режима инвертора? Что нужно сделать, чтобы перевести преобразователь из одного режима в другой?
4. С какой целью на преобразовательных подстанциях прибегают к каскадному соединению мостов?
5. Чем линия постоянного тока отличается от линии переменного тока равной пропускной способности?
6. Назовите мероприятия, которые применяются на преобразовательных подстанциях для компенсации токов высших гармоник и реактивной мощности, обоснуйте эти мероприятия.
7. От каких факторов зависит мощность, передаваемая по линии постоянного тока, и как ее можно регулировать?
8. В каких случаях целесообразно использовать униполярную и биполярную схему электропередачи постоянного тока?
9. От каких факторов зависит мощность, передаваемая по линии переменного тока, и как ее можно регулировать?
10. Перечислите типы устройств, с помощью которых можно управлять мощностью, передаваемой по линии переменного тока. Назовите принципы, положенные в основу их создания.
11. На каком принципе основано создание фазоповоротного устройства?
12. Что такое универсальный регулятор потоков мощности и как он работает?
Литература для самостоятельного изучения
11.1. Худяков В.В. Электропередачи постоянного тока и опыт их эксплуатации. М.: Издательство МЭИ, 1992.
11.2. Ивакин В.Н., Сысоева Н.В. Худяков В.В.Электропередачи ивставки постоянного тока и статические тиристорные компенсаторы / под ред. В.В. Худякова. М: Энер-гоатомиздат, 1993.
11.3. Кощеев Л.А.Электропередачи постоянного тока. Нужны ли они России? // Электричество. 1999. № 3. С. 29—36.
11.4. Ивакин В.Н., Ковалев В.Д., Худяков В.В.Гибкие электропередачи переменного тока // Электротехника. 1996. № 8. С. 16—21.
11.5. Кочкин В.Н., Шакарян Ю.Г.Режимы управляемых линий электропередачи // Электричество. 1997. № 9. С. 2—8.
11.6. Управляемыеподмагничиванием электрические реакторы: сб. статей / под ред. A.M. Брянцева. М.: Знак. 2004.
11.7. Кочкин В.Н., Дементьев Ю.А.Управляемые линии электропередачи // Электрические станции. 1999. № 2. С. 31—38.
11.8. Болдырев Е.А.Работа преобразовательных устройств нового класса в электропередачах переменного и постоянного тока // Электричество. 2001. № 9. С. 68—76.
11.9. Дорофеев В.В.Перспективы применения в ЕЭС России гибких (управляемых) электропередач переменного тока / В.В. Дорофеев, Ю.Г. Шакарян, В.И. Кочкин и др. // Электрические станции. 2004. № 8. С. 10—13.
11.10. Рыжов Ю.П., Моти Бирджанди А.А.Режимные характеристики линии переменного тока с векторным управлением // Электричество. 2004. № 9. С. 2—10.
Лекция двенадцатая
Дата добавления: 2014-12-21; просмотров: 5315;