Характерные черты и сферы применения контроллеров.
Потребность в применении программируемых логических контроллеров (ПЛК) обозначилась в 60 – х годах прошлого века. Для многих технических задач применяемые средства автоматизации строились преимущественно на релейно – контактных элементах и за значительный период своего использования обнаружили целый ряд присущих им недостатков:
Ÿ для разработки, обслуживания и ремонта таких систем требовались значительные кадровые и экономические ресурсы, так как каждая отдельная схема создавалась под конкретную, и только под неё, задачу;
Ÿ переналадка схемы на решение другой задачи была невозможна без полной или кардинальной разборки её, и, если нужно, - с возможностью повторного использования компонентов – это трудоёмко и неудобно;
Ÿ затруднительно объединение в единую структуру фрагментов системы, территориально удалённых друг от друга;
Ÿ практически невозможно построить схему на реле, выдержав её в минимальных габаритах;
Только с появлением ПЛК, построенных на микропроцессорах, удалось сосредоточить в конструктивно очень компактном модуле сотни и даже тысячи «релейных» элементов, счётчиков, таймеров, пусть даже не существующих физически, а программно воспроизводимых. Это позволило создать гибко переналаживаемую структуру, способную выполнить любую из очень широкого круга задач.
Возможности программируемых логических контроллеров делают их практически незаменимыми для автоматизации насосных станций, компрессорных установок, котельных, конвейеров, норий, для управления технологическими процессами в комплексе с датчиками самого различного вида, приводными устройствами, клапанами, задвижками и т. д. по схеме взаимодействия с объектом, изображенной на рис. 1.1.

Рис. 1.1
Именно поэтому первоначально сформулированной причиной появления ПЛК была названа задача вытеснения из управляющих устройств элементов релейно – контактной техники. Даже больше того, некоторые фирмы – производители (Schneider Electric, например) называют свою продукцию интеллектуальными реле.
Конечно, возможности ПЛК не безграничны. Некоторые из них обладают небольшим быстродействием, не всегда удобно сопрягаются по входным и выходным цепям. Они оперируют данными не в кодовой форме, а c их логическим или числоимпульсным представлением и т.д. Но, тем не менее, игнорирование их достоинств в настоящее время объяснимо только для тех, у кого принятие технических решений на уровне многолетней давности стало непререкаемым предпочтением.
1.2. Состав контроллера, связь с объектом, виды сигналов
Из блок – схемы системы управления некоторым объектом (рис. 1.1), являющимся локальной подсистемой некоторого технологического процесса, можно хотя бы предварительно установить функции, которые выполняет ПЛК в качестве управляющего устройства, из чего он должен состоять и какое это может оказать влияние на особенности программирования и применения.
1.2.1. Структура контроллера.
Связь контроллера с окружающей средой осуществляется через устройства ввода и вывода. Через первые в контроллер вводятся сигналы о параметрах и характеристиках объекта управления, через вторые – выводятся управляющие воздействия на включение / выключение исполнительных устройств. Для прохождения сигналов через порты ввода / вывода эти устройства реализуются не программно, они должны быть физически существующими.
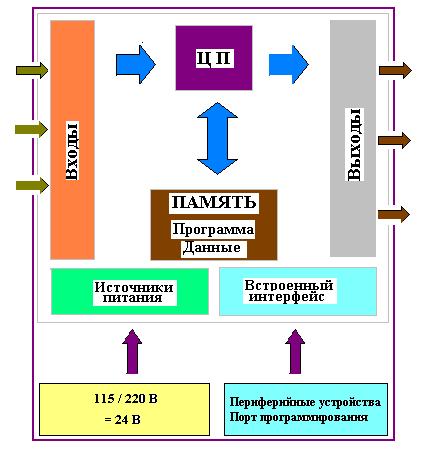 |
Множество внутренних реле, счётчиков, таймеров, необходимых для составления и работы программы, физически не существуют, они моделируются центральным процессором (ЦП) контроллера. Именно благодаря этому удалось в ограниченном объёме «разместить» огромное количество блоков, каждый из которых предназначен для имитации выполнения некоторой вполне конкретной задачи. Более подробно состав и взаимодействие отдельных компонентов внутренней структуры ПЛК раскрываются на рис. 1.2.
Рис. 1.2
Тот факт, что внутренняя структура ПЛК основывается на множестве программно моделируемых функционально законченных блоков, совершенно иначе ставит вопрос о технике программирования задач для ПЛК. В какой бы форме ни обращались данные внутри контроллера, очевидно, что среда программирования позволяет программисту работать без необходимости обращаться к Ассемблеру, а на некотором упрощенном языке. С точки зрения пользователя несущественными становятся углублённые представления о работе микропроцессорных устройств, о составе компонентов и объединении их в единую систему. Это значительно сглаживает требования к уровню квалификации пользователей и в немалой степени способствует росту привлекательности использования логических контроллеров.
Успешность применения ПЛК для задач управления зависит от того, насколько подробно и правильно в контроллер вводится информация о состоянии и поведении объекта. Чтобы грамотно встроить ПЛК в разрабатываемую систему управления (СУ), достаточно выполнить несколько очевидных, но, тем не менее, очень важных правил, основные из которых следующие:
- информация о наиболее важных параметрах и характеристиках объекта, определяющих особенности управления в данной задаче, должна быть введена в контроллер;
-форма представления сигналов должна быть такой, которую контроллер в состоянии правильно воспринять.
В связи с этим надо хотя бы в краткой форме дать характеристику наиболее часто встречающимся видам сигналов, тому, в какой форме они могут быть заданы, и какие схемы сопряжения контроллера с источниками сигналов при этом используются.
1.2.2.Виды сигналов.
1. Дискретные (DC) сигналы характеризуются наличием только двух состояний: включено / выключено, которые часто обозначаются как ONиOFF. Контроллер по этому сигналу может отменить выполнение какого – либо действия или активизировать выполнение другого.
Условимся считать, что формирование уровней напряжения DC сигналов выполняет источник сигнала (датчик, кнопка, тумблер), т.е. сигнал поступает уже в виде, пригодном для ввода его в контроллер.
2. Сигнал типа « СУХОЙ КОНТАКТ » характеризуется тоже наличием двух состояний « включено / выключено », но это означает лишь смысловое содержание сигнала - нахождение контактов в любом из этих состояний, но пока ещё не уровни сигналов на входе ПЛК. Просто в какой-то части схемы что-то произошло, и контактная группа переключилась из одного состояния в другое. Чтобы контроллер мог отреагировать на изменение коммутационного состояния реле, надо от некоторого источника при замыкании контакта подать на вход ПЛК напряжение, а при размыкании – снять его.
Иными словами, при выполнении входной цепи типа « сухой контакт » обеспечение требуемого уровня электрического сигнала на входе контроллера должен предусматривать разработчик на этапе проектирования схемы. Можно считать, что этим только и отличаются два только – что рассмотренные виды входных сигналов.
Сформировать требуемый уровень напряжения на входе контроллера при отработке сигнала типа «сухой контакт» можно либо подачей сигнала от некоторого стороннего источника, либо используя напряжение питания контроллера (рис.1.3).
3.Аналоговые (AC) сигналы представляют собой очень широкий и чрезвычайно важный тип входных сигналов контроллера. Без них невозможно было бы вводить и отслеживать при управлении текущие значения плавно изменяющихся параметров, задавать плавные управляющие воздействия и изменяемые числовые уставки параметров программы и управляемого процесса.
Напомним, что внутри контроллера все операции над данными ведутся программно. Следовательно, ни о каких действиях над токами и напряжениями речи быть не может из-за отсутствия физической реализации блоков, поэтому естественно, что форма представления токов и напряжений при вводе в контроллер должна способствовать такой работе.
В контроллерахα – серии фирмы MITSUBISHI ELECTRIC используется блок  для ввода аналоговых сигналов, который предполагается как аналого – цифровой преобразователь (АЦП) с диапазоном преобразования 10 B и числом разрядов m = 8. При таких условиях внутри диапазона преобразования удаётся определить (2m - 1) = 255 равноотстоящих друг от друга уровней напряжения. В реально существующих АЦП эти уровни представляются кодами от 00000000 до 11111111, но для логических контроллеров такое отображение величин напряжения неудобно. Это вызвано тем, что рассмотрение ПЛК, выполняемое в данном пособии, ограничено наиболее функционально «лёгкими» моделями, которые, как правило, не оперируют кодами.
для ввода аналоговых сигналов, который предполагается как аналого – цифровой преобразователь (АЦП) с диапазоном преобразования 10 B и числом разрядов m = 8. При таких условиях внутри диапазона преобразования удаётся определить (2m - 1) = 255 равноотстоящих друг от друга уровней напряжения. В реально существующих АЦП эти уровни представляются кодами от 00000000 до 11111111, но для логических контроллеров такое отображение величин напряжения неудобно. Это вызвано тем, что рассмотрение ПЛК, выполняемое в данном пособии, ограничено наиболее функционально «лёгкими» моделями, которые, как правило, не оперируют кодами.
Рассматриваемый способ ввода аналоговых сигналов является общеупотребляемым, почти универсальным, и его легко пояснить следующим образом. Максимальное напряжение 10 B соответствует сумме 255 минимальных дискретных значений (дискрет). Поэтому напряжению 2 B соответствует число дискрет в пять раз меньшее, т. е. равное 51. Подобным образом любое значение напряжения N в интервале от 0 до 10 B может быть приближенно заменено вполне определённым числом дискрет, вычисляемым через простейшую пропорцию: 10 B ----- 255 дискрет
N B ----- X дискрет, значит X = 255 • N / 10.
Это число вводится в ПЛК, и там с ним можно выполнять операции сравнения, счёта, арифметических преобразований, позволяющих, как правило, решать достаточно сложные задачи управления.
4. Токовые сигналы. У контроллеровα - серии, LOGO!, да и других тоже ввод аналоговых сигналов выполняется через порты, работающие в формате 0…10 B. Эти контроллеры не имеют токового (0…20 mAили4 … 20 mA) входа, хотя датчиков и других сопрягаемых устройств с токовым выходом очень много, и, вполне возможно, даже больше, чем в формате 0 …10 B. Как и во всех датчиках, измеряемый параметр преобразуется датчиком в изменяемую величину выходного сигнала, которым в данном случае является не напряжение, а ток. При токовом выходе передающей средой является пара проводов, по которым течёт ток, величина которого в каждый момент времени соответствует текущему значению измеряемого параметра.
Схемотехнический приём, позволяющий преобразовать токовый выход датчика к параметрам аналогового ввода контроллеров по постоянному напряжению, чрезвычайно прост. Для этого обычно к токовой линии подключают внешний резистор R номиналом 500 Ом (рис. 1.4), падение напряжения на котором от протекания тока 20 миллиампер равно 10 вольтам, и тем самым весь диапазон изменения тока в сигнальной цепи переводится на стороне контроллера в формат 0…10 B.
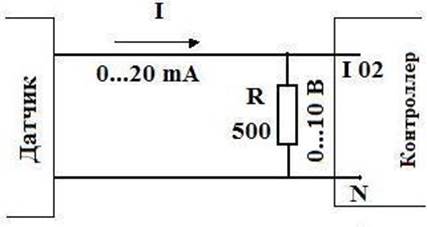
Рис. 1.4
5. Иногда встречается необходимость аналогового ввода дискретных сигналов.Допустим, что DC сигнал, подаваемый на вход ПЛК, может принимать значения только от 0 до 5 вольт, а вход контроллера, рассчитанный на работу с сигналами 0 …24 B, распознаёт значения ON и OFF на уровне примерно 12-14 вольт.
Это означает, что фактически подаваемый сигнал будет слишком мал для того, чтобы контроллер мог распознать уровни включенного и выключенного состояний.
 |
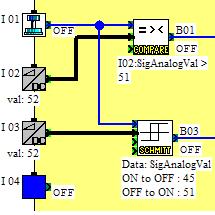
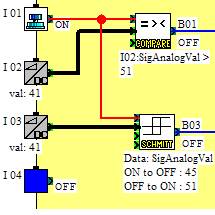
Чтобы обеспечить нормальные условия для ввода и таких сигналов, можно рекомендовать использование промежуточного формирователя на основе чувствительных пороговых устройств. Такими устройствами могут быть компаратор или триггер Шмитта, функциональные блоки которых предусмотрены практически во всех средах программирования. На рис. 1.5 средствами α -Programming показано, как работают эти блоки при различных значениях вводимых величин.
а б
в
Рис. 1.5
В первом состоянии (рис.1.5, а) через блоки аналогового ввода DC выставлены значения сигналов I 02 и I 03, характеризуемые числом 52, т.е. это сигнал чуть-чуть больше 2 вольт, тогда как количественные значения уставок на включение обоих блоков одинаковы и равны 51. Тем не менее, ни один из блоков не перешел в состояние ON, так как с входа I 01 не был подан сигнал разрешения на срабатывание. Синим цветом отображается состояние «выключено», т.е. OFF. Соответственно этому красным цветом – обозначается состояние « включено », т.е. ON.
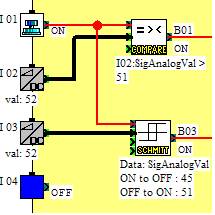
Рисунок 1.5, б показывает переход обоих пороговых элементов в ON (выходы B 01 и B 03) после получения разрешающего уровня I 01, а последний (рис. 1.5, в) – их возвращение в выключенное (OFF) состояние из-за уменьшения величины входного сигнала ниже заданного порога переключения.
Дата добавления: 2014-12-20; просмотров: 1162;