Исполнение выходных цепей датчиков сигналов
Этот вопрос важен для того, чтобы выполнить физическое подключение датчиков к контроллеру, так как при этом всегда встают вопросы о необходимом числе проводов, цепей, которые надо использовать, и что куда подключить?
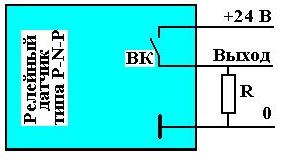
Наиболее простым получается соединение с датчиками, обладающими релейными выходами (рис.1.11). На клеммах 3-4-5 организована контактная группа, гальванически не связанная с остальными компонентами контроллера. Это позволяет подать входной сигнал на ПЛК через эту контактную группу от любого подключенного к ней источника питания.

Рис. 1.11
Использование релейного переключения сигнала может вызвать дополнительные требования по обеспечению импедансных соотношений в прерываемой цепи. Импеданс – это полное или кажущееся сопротивление, учитывающее не только его активную часть, но также индуктивную и емкостную составляющие. Их соотношение оказывает влияние на характер переходных процессов в разрываемой цепи. Это может стать причиной возникновения перенапряжений на элементах схемы и, как следствие, - привести к искрообразованию, что совершенно недопустимо для очень широкого круга применений. Поэтому там, где это необходимо, сопряжение выполняют с применением специальных модулей – барьеров искробезопасности [ ] или по особо организованным интерфейсам [ ]. Повышение искробезопасности обеспечивают путём уменьшения значений питающих напряжений, ограничения номинальных величин емкости и индуктивности в разрываемой цепи, применения параметрических (увеличение доли активного сопротивления) и схемных приёмов предотвращения перенапряжений.
Часто встречается такое исполнение выходной цепи датчика,
а б
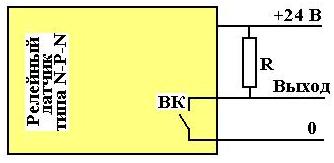
Рис. 1.12
при котором переключение выходного сигнала осуществляется бесконтактно, за счёт применения транзистора в выходном каскаде. Распространены два варианта таких выходов N – P – Nи P – N - P при трёхпроводном включении (рис.1.12). Оба варианта построены на каскаде с открытым коллектором, поэтому требуют включения внешнего резистора R. Если иметь в виду подключение датчиков с таким выходом к контроллеру, нужно помнить, что сигнал на вход ПЛК надо подавать плюсом на входную клемму относительно нулевой шины питания. Выполнить это условие можно, если снимать сигнал с R относительно корпуса у датчиков P – N – P типа (рис.1.12,а) или с коллекторно - эмиттерного перехода выходного транзистора у датчиков N – P – N типа (рис.1.12,б). Нетрудно заметить, что включение транзистора в первом случае приводит к выдаче выходного сигнала уровнем ON, тогда как во втором – уровнем OFF. Получаемая взаимная инверсия снимаемого сигнала с датчиков, обладающих различным исполнением выходов, легко учитывается при составлении программы контроллера.
Такого же типа выходные цепи широко используются для находящих широкое применение индуктивных, ёмкостных и других датчиков положения (приближения) [ ]. Их особенность только в том, что вместо транзистора ключевым элементом может использоваться релейный внутренний контакт ВК(рис.1.14). С предыдущим вариантом (рис.1.13) это исполнение выхода объединяют похожесть расположения ключевого элемента и одинаковость способа сопряжения с контроллером, а с вариантом, изображенным на рис.1.12, – только то, что ключ выбран контактным.
 а б
а б
Рис. 1.13
Обычно в сопроводительной документации на приобретаемые компоненты средств автоматизации указывается вид исполнения входных и выходных портов, приводятся их характеристики. Но номинал резистора R в схемах рис.1.12 и 1.13 скорее всего в этих характеристиках указан не будет. Причина этого в том, что для его определения требуется точно знать, что с чем сопрягается в данном случае и при каком соотношении параметров.
Пример расчёта параметров цепи сопряжения.
Исходные данные. К входу контроллера LOGO! фирмы SIEMENS через порт ввода дискретных сигналов подключается ёмкостный датчик положения E2K - C25ME1 фирмы OMRON, имеющий выходной порт N – P – N типа в соответствии с рис.1.13, б. Напряжение питания датчика равно + 24 B.
Задание. Необходимо найти диапазон допустимых значений сопротивления R.
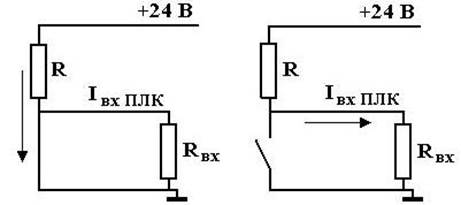
Решение.Цепь передачи сигнала может находиться в двух состояниях – включенного и выключенного контакта ВК. Соответствующие схемы замещения приведены на рис.1.14.
а б
Рис. 1.14
При замкнутом контакте (рис.1.14,а) входная цепь ПЛК зашунтирована накоротко, Iвх ПЛК =0, и ток протекает от источника +24 B через резистор R. Этот ток не должен быть больше разрешённого для выходной цепи датчика, так как иначе контакт сгорит. По техническим параметрам E2K-C25ME1 ток Imax = 0,2 A. Можно найти Rmin = 24 B / 0,2 A =120 Oм.
При разомкнутом положении ВК (рис.1.14, б) ток протекает через последовательное соединение R и Rвх ПЛК. По характеристикам контроллера его входная цепь «распознает» сигналы уровней ON и OFF при Uвх = 12 B и Iвх > 2,5 mA. Примем Iвх = 5 mA и будем считать, что на резисторе R от протекания такого тока падение напряжения не должно превышать UR = Uпит - Uвх = 24 B – 12 B = 12 B. Этому будет соответствовать максимально допустимое значение сопротивления Rmax =UR / I вх = 12 / 0,005 = 2400 Ом.
Таким образом, величина сопротивления R может быть выбрана не меньше 120 Ом (иначе сгорит контакт) и не больше 2,4 кОм, чтобы контроллер не потерял способность распознать при вводе уровни сигналов ON и OFF.
Дата добавления: 2014-12-20; просмотров: 1823;