Дискретизация и континуализация
Дискретизация. Если исходное описание линейной системы непрерывно, часто можно перейти к дискретному описанию при помощи следующей процедуры.
Пусть состояние x(t) системы (11) доступно измерению в дискретные моменты времени tk=kh, k=0, 1……., где k>0 – шаг дискретности. Пусть u(t) постоянно на промежутках между моментами коррекции tk. Тогда динамику векторов xk=x(tk) можно описать разностными уравнениями (13), в которых матрицы P и Q определяются соотношениями

 (19)
(19)
Здесь eAh – экспоненциал матрицы А, определяется формулой
 (20)
(20)
Если предположение о кусочном постоянстве u(t) не выполняется, то переход от (11) к (13) является приближенным, но его точность растет по мере уменьшения шага h. При достаточно малых h для вычисления eAh можно удерживать лишь несколько членов ряда (11) или аппроксимировать сумму (11) каким-либо способом.
Например, при переходе от (11) к (13) можно пользоваться формулой  , соответствующей численному интегрированию (11) методом Эйлера. При такой аппроксимации передаточные функции дискретной и непрерывной систем будут связаны соотношением
, соответствующей численному интегрированию (11) методом Эйлера. При такой аппроксимации передаточные функции дискретной и непрерывной систем будут связаны соотношением
 (21)
(21)
т.е при переходе к дискретному времени в передаточной функции W(p) системы (16) нужно заменить p на (1-z)/h. Если матрица A гурвицева, т.е. Re λi(A)<0, то метод Эйлера дает устойчивую аппроксимацию лишь при
 (22)
(22)
где λi(A) - собственные числа матрицы А (корни полинома А(λ)). Целый ряд способов перехода от (11) к (13) основан на аппроксимации матрицы eAh дробями Падэ. Частными случаями этих способов является метод Тастина (формула Падэ порядка)
 (23)
(23)
приводящий к соотношению между передаточными функциями
 (24)
(24)
а также метод Дэвисона (формула Падэ порядка)
 (25)
(25)
Отметим, что (23) и (25) дают устойчивые аппроксимации при любом h>0 (разумеется, если А гурвицева).
Если непрерывная система нелинейна, то для перехода к ее дискретному описанию также можно использовать методы численного интегрирования. Например, метод Эйлера дает для системы (9) дискретное описание:

 (26)
(26)
Континуализация – это переход от дискретной математической модели системы к непрерывной. Если дискретная модель системы имеет вид (13), то перейти к непрерывной модели (11) можно по формулам
 (27)
(27)
Вытекающими из (11), где lnP – логарифм матрицы – функция, обратная к экспоненциальной и также определяемая через ряд
 (28)
(28)
сходящийся при ||Х|| < l (Х=Р-I). С точностью до величин порядка h2 можно ограничиться формулами
 (29)
(29)
соответствующими методу Эйлера. Однако удобнее всего переходить от дискретной передаточной функции к непрерывной по формулам (23) и (26). Например, по методу Эйлера (21) достаточно заменить в передаточной функции  переменную
переменную  на 1 - hp.
на 1 - hp.
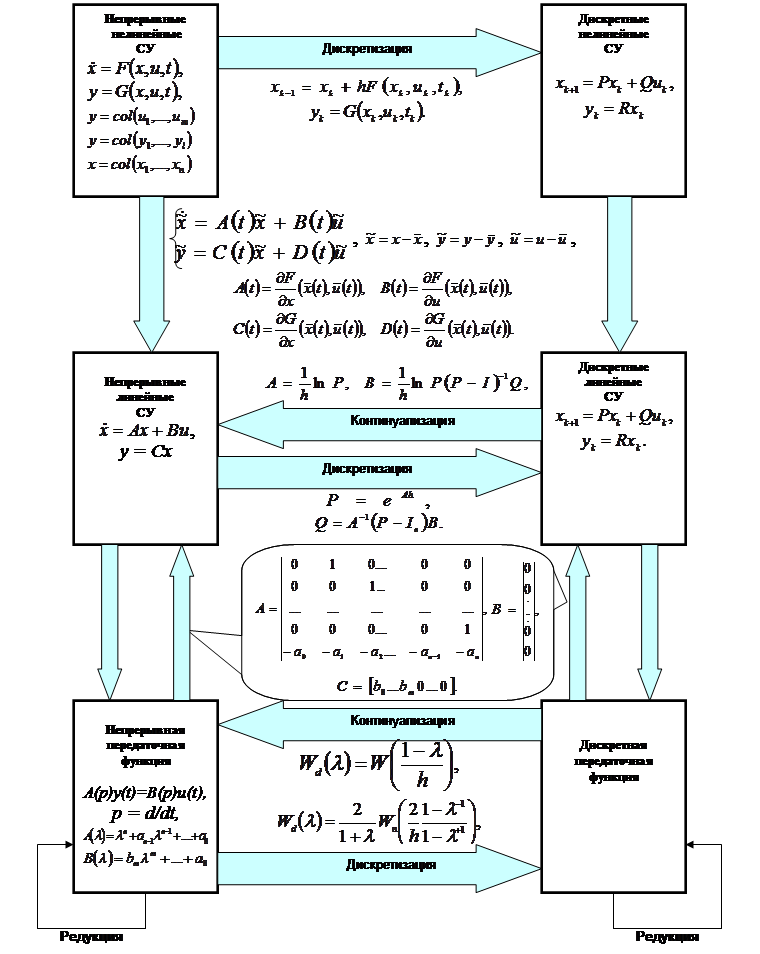
При исследовании линейных систем получили распространение также методы упрощения описаний систем путем редукции - (понижения порядка). Взаимосвязь различных описаний динамических систем представлена на рис. 1.

Дата добавления: 2017-03-29; просмотров: 2342;