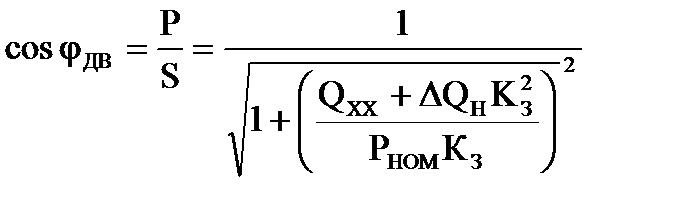
Зависимость реактивной мощности асинхронного двигателя от нагрузки.
При нормальной нагрузке:
Холостой ход:


| Q |
| Qном |
| Qхх |
| Кз |

 коэффициент загрузки
коэффициент загрузки
| jдв |
| 0,8 |
| Кз |
| 0,5 |
| 0,3 |
| 0,51 |
| 0,65 |
Условия рентабельности требуют:

Коэффициент потерь численно равны отношению потерь активной энергии в сети к 1 кВа реактивной энергии.
 - для каждой сети свой.
- для каждой сети свой.
Вывод: работы, проводимые в энергонадзоре, что если КЗ< 0.45, то всегда целесообразна замена двигателя, двигателем меньшей мощности и энергетические расчеты не нужны. Если КЗ> 0.7 до 1 то никаких замен не требуется. Если 0.45<КЗ< 0.7, то целесообразность замены должна быть подтверждена механико-экономическим расчетом.
Компенсация реактивной мощности статических преобразователей.
Выбор схемы с целью снижения потребления Q (cosj)
| I1 |
| j |
| A |
| C |
| B |
| g |

aу – угол управления В
 - угол I1 Ð U
- угол I1 Ð U 
 - неуправляемый В
- неуправляемый В  Для ДПТ
Для ДПТ
| лебедка |
 - управляемый В
- управляемый В  aу=j
aу=j
| U |
| 0.5 |
| М |
| станок |
| вентилятор |
| n |
Типы характеристик нагрузочных механизмов.
В зависимости от механизма, приводимого ДПТ, необходимо рассчитать
QВИ= f(kЗ) для данного механизма. Если реактивная мощность снижается с уменьшением нагрузки, то для данного механизма целесообразно применять устройства компенсации. Если коэффициент загрузки находится в пределах 0.5 – 1 применяется схема:
а) 2х мостовая схема.
| Д |
| НВ |
| УВ |
 - коэффициент загрузки ДПТ
- коэффициент загрузки ДПТ
б) Искусственная компенсация.
| Д |
| Ском |
| Ск |
| C |
| B |
| A |
| TP |
1)
| А В С |
| Iв |
| УВ в иск. ком. |
| Д |
| С L |
| Iy |
Статические преобразователи и конденсаторы для компенсации реактивной мощности несовместимы, т.к. очень часто возникают на некоторых гармониках резонансы напряжений, что ведет к повышению напряжения на конденсаторах и выходу их из строя.
Дата добавления: 2017-03-29; просмотров: 1048;