Режимы работы асинхронной машины
 Пусть в начале ротор не вращается. Магнитное поле, пересекая проводники ротора индуктируют в них ЭДС. При замкнутой цепи ротора по обмотке его потечет ток.
Пусть в начале ротор не вращается. Магнитное поле, пересекая проводники ротора индуктируют в них ЭДС. При замкнутой цепи ротора по обмотке его потечет ток.
Взаимодействие потока статора и тока ротора вызовет усилие, действующее на проводник, под действием которого ротор начнет вращаться. Вращение будет в ту же сторону, что магнитный поток. Скорость ротора будет меньше скорости вращения магнитного поля статора. Скольжение
 .
.
Разберемся, в каких пределах будет изменяться скольжение.
1. Момент зависит от потока Ф и тока I2 при U = const, поток также постоянен. Если увеличивается момент на валу, то увеличивается и момент двигателя за счет увеличения тока I2, а I2 Е2 S, S за счет увеличения интенсивного пересечения проводников ротора.
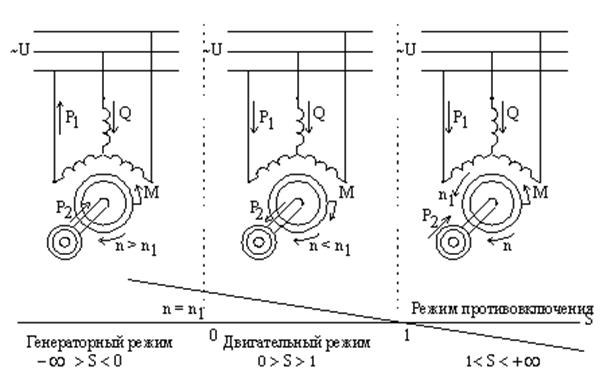
При неподвижном роторе n = 0, S = 1
Если ротор будет вращаться с n = n1, S = 0
Это диапазон скольжений соответствует двигательному режиму. Мощность потребляемая из сети будет преобразована в механическую на валу.
2. Но если под действием спускаемого груза раскрутить ротор до скорости больше синхронной, то машина перейдет в генераторный режим
n > n1, S < 0 - скольжение отрицательное
При этом режиме механическая мощность будет преобразована в электрическую, которая будет отдаваться в сеть Р1, а реактивная будет потребляться для создания магнитного потока - Q.
3. Режим противовключения.
Если например в приводе имеется большой маховик, то если отключить двигатель, то маховик будет вращаться длительное время до остановки, но если же мы переключим две фазы асинхронного двигателя, то его момент будет направлен против вращения маховика и время останова его резко сократиться. При этом режиме мощность будет потребляться из сети и механическая мощность будет теряться в роторе. Это тяжелый режим для асинхронной машины. Поэтому, если используется двигатель с фазным ротором, то на период работы в цепь ротора включают значительное сопротивление для ограничения тока. Если же используется короткозамкнутый двигатель, то пускают его при пониженном напряжении. Ниже на рисунке представлены все три режима работы асинхронной машины.
Режим двигателя
Рассмотрим два крайних режима двигателя:
а) холостой ход двигателя
При холостом ходе нет нагрузки на валу, ротор под действием вращающего магнитного поля статора разгонится до скорости близкой к синхронной, а ток статора равен току холостого хода. Мощность, потребляемая из сети пойдет на покрытие потерь, т.е.
Ро = Рэл1 + Рмг + Рмех + Рдоб
Разница между тр-м и двигателем будет только конструктивная. В двигателе имеется воздушный зазор. Поэтому ток холостого хода двигателя равен 20 ¸ 30% от номинального.
б) режим короткого замыкания
При этом режиме ротор механически заторможен, а обмотка ротора закорочена. К статору подводится пониженное напряжение, при котором ток имеет значение близкое к номинальному. Мощность короткого замыкания пойдет на покрытие потерь в стали и обмотках. При номинальном напряжении пусковой ток
Iп = (5 ¸ 7)Iн.
Используя данные режима холостого хода и короткого замыкания можно построить круговую диаграмму, а по ней определить рабочие характеристики двигателя при нагрузке.
Дата добавления: 2019-07-26; просмотров: 798;