Основные расчетные зависимости для определения параметров зубчатого колеса, исходя из схемы станочного зацепления.
1. Радиус окружности вершин ra.
ra = r + xm + ha*m – Δуm (1)
Δуm – уравнительное смещение инструмента (расстояние между граничной прямой инструмента и окружностью вершин заготовки).
Δу вводится в расчет для того, чтобы при создании зубчатой передачи с колесами z1 и z2 было бы обеспечено зацепление этих колес без бокового зазора при стандартном радиальном зазоре.
2. Радиус окружности впадин rf.
rf = r – ha*m – c*m + xm (2)
3. Определение высоты зуба.
h = ra – rf = 2 ha*m + c*m – Δуm (3)
4. Определение коэффициента изменения толщины зуба.
Δ=2.x.tga
Специальные передаточные (планетарные) механизмы.
Планетарным называется механизм, имеющий в своем составе хотя бы одно звено с подвижной геометрической осью в пространстве.
Звено, имеющее подвижную геометрическую ось в пространстве, называется сателит.
Звено, на которое устанавливают ось сателитов, называется водило (Н).
Зубчатые колеса, имеющие неподвижную геометрическую ось в пространстве, называются центральными.
Центральное колесо, имеющее внешние зубья, называется солнечное колесо.
Центральное колесо, имеющие внутренние зубья, называется коронная шестерня (опорное колесо).
Достоинства планетарных передач:
1. имеют малые габариты и вес из-за того, что поток мощности, подводимый к центральному колесу, распределяется по к сателитам (к – количество сателитов). Затем поток мощности собирается на выходном звене. На одной планетарной передаче можно поставить до 24 сателитов.
2. очень высокий КПД, в среднем 0.99.
Недостатки:
Если число сателитов неравно 3, то необходим специальный механизм, который бы выравнивал нагрузку между сателитами. Этот механизм утяжеляет и удорожает конструкцию.
Сравнительный анализ передачи с неподвижными осями планетарной передачи.
На первое колесо подается крутящий момент, а со второго снимают.
Ось В неподвижна Ось В подвижна
u1-2 =  =
=  u1-Н =
u1-Н = 
Через число зубьев u1-Н записать нельзя, т.к. ось В – подвижная ось.
Чтобы записать передаточное отношение через число зубьев, применим метод обращения движения:
мысленно сообщим всем звеньям механизма, включая стойку, дополнительное движение с угловой скоростью -wн. Получим обращенный планетарный механизм с неподвижными осями зубчатых колес.
В обращенном движении звенья этого механизма будут иметь следующие угловые скорости:
w1* = w1 – wН
w2* = w2 + (– wН) = w2 – wН
wН* = wН – wН = 0
 - формула Виллиса
- формула Виллиса
Определение передаточного отношения планетарных механизмов различных схем.
Планетарный однорядный механизм (механизм Джеймса).
КПД в одном ряду – 0.99
Передаточное отношение можно определить:
1. графическим способом по чертежу;
2. аналитическим способом, используя формулу Виллиса.
Графический способ определения передаточного отношения.

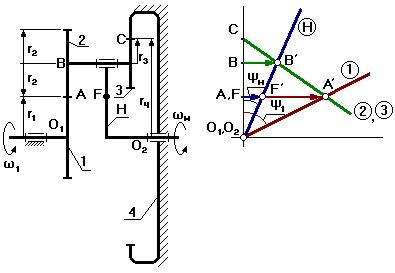
Выберем на водиле Н точку F которая расположена на том же расстоянии от оси О2, что и точка А.
Оси О1 и О2 расположены на одном уровне.
Для данной схемы входное звено – звено 1 (солнечное колесо), выходным является водило Н.
Зададимся отрезком АА’, который изображает линейную скорость колеса 1 в точке А. Т.к. колесо 1 вращается вокруг О1, то закон распределения линейной скорости по первому звену изображается прямой линией О1А’. Сателлит 2 в т.А имеет такую же линейную скорость, что и колесо 1. В т.С сателлит 2 имеет МЦС в абсолютном движении, т.к. идет контакт с неподвижным колесом 3. Закон распределения линейной скорости по второму колесу изображается прямой линией СА’. В т.В сателлит имеет линейную скорость, которая изображается отрезком ВВ’, однако т.В является также и осью водила Н, которое вращается вокруг О2. Следовательно, закон распределения линейной скорости по водилу изобразиться прямой линией О2В’. Для точки F водила линейная скорость изображается отрезком FF’.
От вертикали до линии распределения скоростей по водилу измеряем угол ψн, а от вертикали до линии распределения скоростей по колесу 1 измеряем угол ψ1. Т.к. углы ψ1 и ψн отложены от вертикали в одном направлении, то это показывает, что входное звено 1 и выходное звено вращаются в одном направлении.



Аналитический способ определения передаточного отношения.

Применим метод обращения движения, обратив планетарный механизм в непланетарный.
w1* = w1 – wН
w3* = w3 – wН = – wН

 – плюсовой механизм.
– плюсовой механизм.
Планетарный механизм со смешанным зацеплением
(с одним внешним и одним внутренним зацеплением).
 при η= 0,99
при η= 0,99
Входное звено – первое звено;
 Выходное – водило.
Выходное – водило.
1– солнечное колесо;
2,3 – блок сателлитов;
4 – коронная шестерня;
Н – водило.
Выберем на выходном звене (на водиле) точку F так, чтобы O1A=O2F (O1 и O2 соосны).
1. Графический способ определения передаточного отношения
Отрезок АА' берем произвольно.
2. Аналитический способ определения передаточного отношения.
Обратим мысленно планетарный механизм в механизм с неподвижным водилом, для того чтобы использовать формулы для механизма с неподвижными осями зубчатых колес (применим метод обращения движения).
В обращенном движении каждое из звеньев будет иметь:
1 звено: ω*1 = ω1 + (–ωн)
2 звено: ω*2 = ω*3 = ω2 + (–ωн)
3 звено: ω*3 = ω*2 = ω3 + (–ωн)
4 звено: ω*4 = ω4 + (–ωн) = –ωн
5 звено: ω*н = ωн + (–ωн) = 0
 (1)
(1)

если (1) переписать через количество зубьев, то
плюсовой механизм
Дата добавления: 2019-07-26; просмотров: 799;