аналитических сетей
Аналитические сети строятся в виде отдельных треугольников, центральных систем, четырёхугольников, цепей треугольников между сторонами или пунктами опорной сети высшего класса. К аналитическим сетям относят также сети, в которых положение пунктов определяется прямой, обратной, комбинированной засечками.
Сущность прямой засечки ( рисунок 8 ) заключается в измерении горизонтальных углов ( a и b ) на пунктах, например, А иВ с известными координатами ХА, УА; ХВ,УВи вычислении координатХР, УР определяемого пункта Рпо формулам Юнга
ХР = ( ХА сtg a+ ХB сtg b + УВ – УА ) / ( сtg a+ сtg b ),
УР = ( УА сtg a+ УB сtg b + ХВ – ХА ) / ( сtg a+ сtg b).
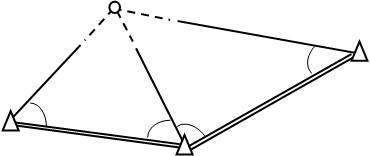 Р
Р
С
b/
a b a/
А
B
Рисунок 8 - Определение координат пункта прямой засечкой
Для контроля определяют координаты пункта из второго треугольника и вычисляют средние значения координат.
Сущность обратной засечки( рисунок 9 )заключается в измерении горизонтальных углов a, b, gна определяемом пункте Р. Затем по координатам исходных пунктов А, В, Сиизмеренным углам вычисляют дирекционныеуглы aАР стороныАР, aВР стороны ВР,а затем координаты ХР, УРопределяемого пункта по нижеприводимым формулам
D A
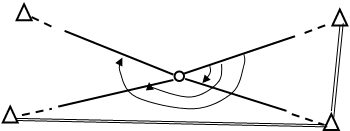 |
Р
G a
b
C B
Рисунок 9 - Сущность обратной засечки
[(ХВ -ХА) ctg a+(ХA- ХС) ctg b+УВ -УС]
 сtg aАР = ,
сtg aАР = ,
[(УВ -УА) ctg a+(УА- УС) ctg b+ХС -ХВ]
aВР = aАР + a,
УР = [УВ + ( УВ -УА) ctg aАР + ХА - ХВ] / (сtg aВР - сtg aAР),
XP = XA + (УP - УА) ctg aAР.
Для контроля измеряют третий угол g между пунктами А и D и определяют координаты пункта Р с учётом координат пункта D.
Определение координат определяемого пункта Р комбинированной засечкой заключается в измерении угла на одном из исходных пунктов, например, угла a1 на пункте А, и угла g1 на определяемом пункте Р ( рис.10 ). Для контроля измеряют аналогичные углы на пунктах Си Р.
Р
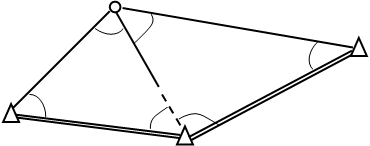 g2
g2
g1 a1 С
a1 b 1 b 2
А
В
Рисунок 10 - Определение координат пункта комбинированной
засечкой
Прямоугольные координаты определяемого пункта вычисляют по формулам Юнгас контролем из двух треугольников
б) Создание съёмочного обоснования проложением
Теодолитных ходов
Ходы съёмочного обоснования, развиваемые методом полигонометрии, называют теодолитными ходами.
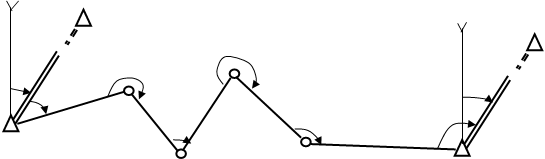
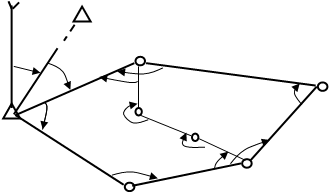
Теодолитные ходы опираются на пункты ГГС или пункты сетей сгущения ( местного значения ). По своей форме они бывают замкнутыми, опирающимися на один пункт сети ( рисунок 11 ) или разомкнутыми ( рисунок 12 ), опирающимися минимум на два пункта сети.
В
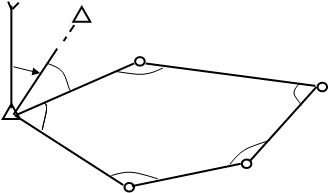 |
a 0 1
d0 d 1 2
b0 b1 b2
bА
А b3 d2
d4
b4 d3 3
Рисунок 11 - Замкнутый теодолитный ход
В
 D
D
aН b3
b1 aК
bА 1 3
d1 d2 b2 d3 d4 b4 bC
А d5
2 4С
Рисунок 12 - Разомкнутый теодолитный ход
 При проложении замкнутых теодолитных ходов с целью контроля внутри него прокладывают, как правило, диагональный ход, опирающийся на пункты замкнутого хода, например, пункты 2, 4 ( рисунок 13 ).
При проложении замкнутых теодолитных ходов с целью контроля внутри него прокладывают, как правило, диагональный ход, опирающийся на пункты замкнутого хода, например, пункты 2, 4 ( рисунок 13 ).
В
a0 4
b0 3
А 6
Рисунок 13 - Замкнутый и диагональный теодолитные ходы
При создании съёмочного обоснования из проложения теодолитных ходов соблюдается следующая последовательность работ:
- проектирование ходов по планам и картам;
- рекогносцировка ходов с целью уточнения составленного проекта и окончательное установление местоположения пунктов хода;
- измерение углов поворота полным приёмов теодолитом 30" точности ( Т30, 2Т30П );
- измерение длин линий землемерной лентой в прямом и обратном направлениях или дважды в одном направлении.
В измеренную линию вводят поправки за компарирование, температуру, если температура компарирования и температура при измерениях различаются более чем на 80, за приведение длины линии к горизонту, если наклон линии к горизонту превышает 1.50.
Результаты измерений записывают в журнал теодолитного хода.
По окончании полевых измерений производится камеральная обработка, конечной целью которой является определение уравненных значений прямоугольных координат пунктов.
Камеральная обработка измерений, выполненных при проложении теодолитного хода, производят в следующем порядке:
- проверяют вычисления углов и расстояний в полевых журналах и вычислений по введению поправок в длины линий; составляют схемы проложенных теодолитных ходов;
- вычисляют суммы измеренных углов S b/ i
S b/ i = b1 + b2 +b3 ...+ bn;
- вычисление теоретической суммы измеренных углов S bТ
S bТ = 1800(n-2),
где n – число измеренных углов в ходе,
если проложен замкнутый ход, и по формулам
S bТ = aк - aн + 1800 n,
S bТ = aн - a к + 1800 n,
если измерены соответственно левые и правые по ходу углы в разомкнутых ходах;
- вычисляют угловую невязку хода f b
fb= S bТ - S bТ'i ;
-вычисляют допустимую невязку ходаf b доп
 fb доп < 3tÖ n,
fb доп < 3tÖ n,
где t – точность теодолита ( 30" );
- вычисляют поправки в измеренные углы db i
d b i = - f b / n;
- вычисляют уравненные ( исправленные ) горизонтальные углы b i
bi = b'i + db i;
- контролируют правильность вычислений
S b i = S b Т.
- вычисляют дирекционные углы направлений a i
ai = a i-1 ± 1800 + b i ,
ai = a i-1 ± 1800 - b i ,
если измерены соответственно левые и правые по ходу углы,
- вычисляют приближённые приращенийя координат DХ'i, DУ'i
DХ'i = d cos ai,
DУ'i = d sin ai;
- вычисляют суммы приближённых значений приращений координатS DХ'i , S DУ'i
S DХ'i = DХ1 + DХ2 + DХ3 +...+ DХn,
S DУ'i = DУ1 + DУ2 + DУ3 +...+ DУn;
- вычисляют теоретические разности приращений координат
S DХТ = ХК - ХН,
S DУТ = УК - УН;
- вычисляют линейные невязки по абсциссе fxи по ординатеfy
fx = S DХТ - S DХ'i,
fу = S DУТ - S DУ'i;
Невязки по абсциссе и ординате свидетельствуют об отклонения конечной точки хода от действительного положения. В этом случае необходимо оценить точность хода. Для этого вычисляют линейную невязку хода DР
DР2 = fХ2 + fУ2,
а затем относительную невязку хода
DР / Р = (fХ2 + fУ2)2 / Р,
которая не должна превышать 1:2000для замкнутого хода и 1:1000 – для диагонального ( разомкнутого );
- вычисляют поправки dХi, dУiв приближённые значения приращений координат
dХi = - fХ di / P,
d Уi = - fУ di / P;
- вычисляют уравненные ( исправленные поправками)приращения координат DХi, DУi
DХi = DХ'i + dХi,
DУi = DУ'i + dУi;
- контролируют правильность вычисления уравненных приращений координат
S DХ i = S DХТ,
S DУi = S DУТ;
- вычисляют уравненные значения прямоугольных координат пунктов съёмочной сети
Хi = Хi-1 + DХ i,
Уi = Уi-1 + DУi.
Вопросы для контроля
1. Понятие геодезического пункта и геодезической сети.
2. Классификация геодезических сетей.
3. Понятие о съёмочных сетях, методы построения их.
4. Сущность метода триангуляции.
5. Сущность метода полигонометрии.
6. Сущность метода трилатерации
7. Сущность прямой и обратной засечек.
8. Сущность прямой геодезической задачи.
9. Сущность проложения теодолитного хода. Полевые измерения.
10. Понятие уравнивания углов и приращений координат точек.
Дата добавления: 2019-04-03; просмотров: 736;