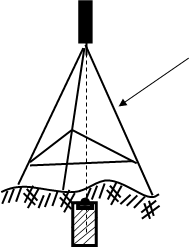
Опознавательный столб
0.70
0.50
1.30 2.20
Глубина
Промерзания грунта
0.20
Рисунок 2 - Центр геодезического пункта
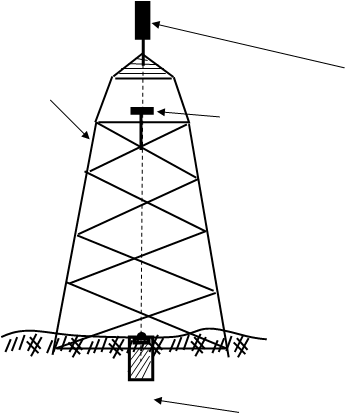 |
Визирные цилиндры
 Сигнал
Сигнал
Инструментальный
Столик
 |
Пирамида
 |
Центры
Рисунок 3 - Наружные геодезические знаки
Методы построения плановых геодезических сетей
Конечной целью построения плановых геодезических сетей является определение прямоугольных координат геодезических пунктов. Обработка измерений и вычисление координат при этом основано на решении прямой и обратной геодезических задач.
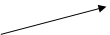
Вопрос о решении обратной геодезической задачи рассмотрен ранее. Сущность решения прямой геодезической задачи ( рисунок 4 ) состоит в том, что по координатам исходного пункта А( ХА,УА ), расстоянию между исходным пунктом и определяемым dAB и дирекционному углу направления с исходного пункта на определяемый aАВвычисляют координаты определяемого пункта В (XВ,УВ)
XВ = ХА + dAB cos aАВ,
УВ = УА + dAB sin aАВ .
 |
B
(XВ,УВ)
D Х aАВ
dAB
А D У
( ХА,УА )
Рисунок 4 - Сущность решения прямой геодезической задачи
Плановые геодезические сети строятся, как правило, методами триангуляции, полигонометрии, трилатерации, прямой, обратной, комбинированной засечками и другими методами.
а) Построение плановых сетей методом триангуляции
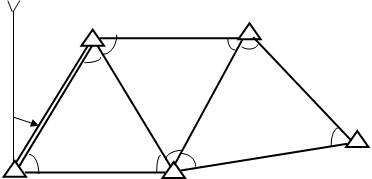
Сущность метода триангуляции заключается в построении плановой геодезической сети в виде примыкающих друг к другу треугольников, в которых измеряют все горизонтальные углы и длину хотя бы одной стороны, например, b, называемой базисом ( рисунок 5 ).
 |
С k D
5 6 8
N
aАС b a m
E
Q
А c B
Рисунок 5 - Построение плановой сети методом триангуляции
В основе метода триангуляции лежит решение треугольника по стороне и двум углам – теорема синусов. Процесс определения координат пунктов триангуляционной сети в принципе заключается в следующем:
- в результате многократного последовательного применения теоремы синусов ко всем треугольникам вычисляют длины сторон всей триангуляционной сети, в которой каждый последующий треугольник связан с предыдущимобщими сторонами, например, а, m, n и т.д. Например, вычисление промежуточной стороны си связующей авыполняют по формулам
с / sin 2 = b / sin 3, с = b sin 2 / sin 3,
a /sin 1 = b / sin 3, a = b sin 1 / sin 3;
-находят суммы углов в треугольниках, определяют угловую невязку, поправки в измеренные углы, вводят их в измеренные углы и вычисляют исправленные ( уравненные ) углы в треугольниках;
- вычисляютдирекционные углы промежуточных и связующих сторон по заданному исходному дирекционному углу aАС и уравненным горизонтальным углам треугольников.
Например, дирекционные углы сторон АВ и ВС - aАВиaВСвычисляют по формулам
aАВ = aАС +1/ ,
aВС = aАC ± 1800 + 3/,
где1/ , 3/ -уравненные горизонтальные углы;
- определяют координаты пунктов триангуляционной сети путём решения прямых геодезических задач. Например, координаты пунктов B и C вычисляют по формулам
XВ = ХА + c cos aАB,
УВ = УА + c sin aАB,
XС = ХA + b cos aCB ,
УС = УA + b sin aCBи т д.
б) Построение плановых сетей методом полигонометрии
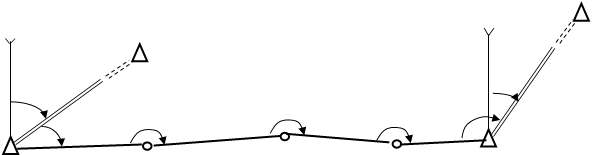 Полигонометрия – метод построения геодезической сети в виде системы замкнутых или разомкнутых ломаных линий, в которых непосредственно измеряют углы поворота biи длины сторон d i(рисунок 6 ).
Полигонометрия – метод построения геодезической сети в виде системы замкнутых или разомкнутых ломаных линий, в которых непосредственно измеряют углы поворота biи длины сторон d i(рисунок 6 ).
D
C
aК
aН
b1 b2 b3 bB
b0
A d1 1 d2 2 d3 3 d4 B
Рисунок 6 - Построение плановой сети методом полигонометрии
Горизонтальные углы измеряют теодолитами со ср.кв.ош. не более 10", а длины линий - шкаловыми лентами, мерными проволоками и светодальномерами с относительной ошибкой, не менее 1:10000.
Полигонометрический ход опирается на исходные пункты в начале хода и в конце ( например,А и В ), имеющие координаты ( ХА,УА ; ХВ,УВ )и дирекционные углы ( aН, aК ).
Координаты точек полигонометрического хода в принципе получают из решения прямых геодезических задач, например,
X1 = ХА + d1 cos aА-1,
У1 = УА + d1 sin aА-1,
X2 = Х1 + d2 cos a1-2,
У2 = У1 + d2 sin a1-2,
X3 = Х2 + d3 cos a2-3,
У3 = У2 + d3 sin a2-3 ,
X4 = Х3 + d4 cos a3-В ,
У4 = У3 + d4 sin a3-В .
Дирекционные углы, входящие в приведенные соотношения, вычисляют по формулам
aА-1 = aН ± 1800 ± b0,
a1-2 = aА-1 ± 1800 ± b1,
a2-3 = a1-2 ± 1800 ± b2,
a3-4 = a2-3 ± 1800 ± b3,
в которых знак " +"перед значением углаbставят в случае, когда измеряют левые по ходу углы, а знак " - " - в случаях, когда измеряют правые по ходу углы.
Полигонометрические ходы представляют собой вытянутые ломаные линии, углы поворота в которых близки к 1800.
в) Построение плановых сетей методом трилатерации
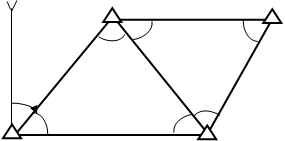
Трилатерация – метод построения плановой геодезической сети в виде треугольников, в которых измеряют длины всех сторон ( рисунок 7 ) Из решения их определяют горизонтальные углы в треугольниках.
 B m D
B m D
C b
a0 n
A а С
( ХА,УА )
Рисунок 7 - Сущность метода трилатерации
Горизонтальные углы в треугольниках, например, угол А в треугольнике АВС вычисляют по формуле тангенса половинного угла
tg 2 A/2 = ( p-b )(p-c )/p ( p-a ),
где а, b, с – длинысторон треугольника, а р - его полупериметр
р = 0.5 ( а + в + с ),
или по теореме косинуса угла
cos A =( а2 + с2 – b2 ) / 2ac.
В этих сетях тоже должны быть исходные пункты с известными координатами и исходными дирекционными углами, например, пункт А.
Зная исходные дирекционные углы, длины сторон в треугольниках и вычисленные горизонтальные углы определяют координаты вершин треугольников, решая в принципе прямые геодезические задачи.
3 Создание сети планового съёмочного обоснования
Изобразить участок местности на листе бумаги в виде топоплана можно, выполнив измерения на пунктах с известными координатами и высотами – на пунктах съёмочной сети.
Создание сети съёмочного обоснования имеет целью:
- сгущение геодезической сети до густоты пунктов, необходимой для выполнения топографической съёмки в заданном масштабе;
- создание геодезической основы для выполнения инженерно-геодезических работ различного характера и назначения - изысканий, перенесения проектов в натуру, привязки геологических выработок и т.п.
Съёмочное обоснование развивается на основе пунктов ГГС и сетей сгущения местного значения. В отдельных случаях съёмочное обоснование развивается в местной системе координат.
Для определения координат пунктов съёмочного обоснования используются методы полигонометрии и триангуляции.
Сети планового съёмочного обоснования, развиваемые методом триангуляции, называют аналитическими сетями.
а) Создание планового съёмочного обоснования построением
Дата добавления: 2019-04-03; просмотров: 519;