Гидравлические движители
Гидравлические движители это часть движителей, предназначенная для работы в жидкой среде (как правило в пресной или соленой воде рек, озер, морей и океанов). Движитель вместе с двигателем и корпусом составляют гидравлический пропульсивный комплекс подвижного объекта (судна, торпеды, глубоководного аппарата, гидробионта, человека-пловца и т.д.). Главными отличительными чертами гидравлических пропульсивных комплексов от воздушных пропульсивных комплексов являются возможность возникновения кавитации и повышенные требования к прочности. Указанными отличительными чертами объясняется бросающееся в глаза различие между лопастями судовых гребных винтов и лопастями авиационных пропеллеров. Учитывая, что кавитация в воздушной среде невозможна, т.к. кавитация это фазовый переход в зоне пониженного давления среды из жидкого состояния в газообразное, цилиндрические сечения лопастей судовых гребных винтов имеют значительно меньшую относительную толщину по сравнению с цилиндрическими сечениями лопастей авиационных пропеллеров. Меньшая относительная толщина приводит к необходимости увеличения относительной ширины лопастей судовых гребных винтов по сравнению с цилиндрическими сечениями лопастей авиационных пропеллеров для обеспечения требуемой прочности лопастей.
Наука, изучающая сопротивление среды равномерному и прямолинейному движению корпуса, движители и их взаимодействие с корпусом, называется «Ходкость». Академик А.Н.Крылов ввел понятие «Мореходные качества» морского подвижного объекта (например, судна). Одно из мореходных качеств было названо «Ходкость».
«Ходкость» (Propulsion)этоспособность самоходного морского подвижного объекта (например, судна) к прямолинейному и равномерному движению, при эффективном использовании двигателя и движителя, преобразующих внутреннюю энергию топлива (химического или ядерного) в механическую энергию поступательного движения судна.
Наука «Ходкость» состоит из двух разделов “Сопротивление движению” и “Движители”. “Сопротивление движению” (Resistance of ship)это часть “Ходкости”,изучающая силу необходимую для буксировки (прямолинейно и равномерно) «голого» корпуса, т.е. корпуса без движителей.
“Движители” (Propulsors)это часть “Ходкости”,изучающая геометрию и гидродинамику (в более общем случае и аэродинамику) движителей, а также их гидродинамическое взаимодействие с корпусом судна.
При изучении «Ходкости» морских подвижных объектов целесообразно различать понятия «Двигатель» и «Движитель», т.к. в отличии от авиации, где получили распостранение реактивные двигатели, объединяющие в одном агрегате и двигатель и движитель, для морских подвижных объектов подобные пропульсивные комплексы являются редкостью (например, суперкавитирующая торпеда «Шквал» с ракетным пропульсивным комплексом). Для простоты нижеследующие определения относятся к традиционному гидравлическому пропульсивному комплексу, состоящему из двигателя, гребного вала и движителя в виде одного гребного винта.
Двигатель (Engine)это механическое устройство, преобразующее химическую или ядерную энергию топлива в механическую энергию вращения гребного вала.
Движитель (Propulsor) –гидромеханическое устройство, преобразующее механическую энергию вращения гребного вала в механическую энергию поступательного движения корпуса судна.
Изолированный движитель (движитель без корпуса или движитель в свободной воде) (Isolated propulsor) - гидромеханическое устройство,преобразующее механическую энергию вращения гребного вала в механическую энергию, создаваемую упором при поступательном равномерном движении движителя в свободной воде без корпуса (например, при испытаниях в опытовом бассейне на специальной гондоле при расположении движителя впереди гондолы или при испытаниях в кавитационной трубе).
Гребной винт (ГВ) (Screw propeller, SP) –движитель, имеющий несколько крыловидных специально профилированных лопастей, закрепленных на ступице через равные угловые расстояния и способный при вращении создавать упор за счет образования подъемной силы на лопастях, при этом упор направлен по оси вращения ГВ в сторону движения, т.е. перпендикулярно плоскости вращения лопастей.
Гребной вал (Propeller shaft) – вращающаяся деталь, соединяющая выходной фланец двигателя с гребным винтом (ГВ) и передающая вращающий момент.
Скорость морского подвижного объекта (velocity) V – скорость прямолинейного и равномерного движения корпуса.
Сопротивление (Resistance) R –модульпроекции на направление движения главного вектора гидродинамических сил, действующих на “голый” корпус судна (“голый” корпус означает корпус без движителей).
Частота вращения гребного винта (Propeller rotational speed in revolutions per second) n – число оборотов гребного вала в секунду, измеряется в Гц, т.е. в 1/сек, согласно системе СИ. Упор движителя (Thrust) T –проекция на ось движителя главного вектора всех гидродинамических сил действующих на элементы (лопасти) движителя при его работе. Момент, необходимый для вращения движителя за корпусом (Torque) Q* -проекция на ось движителя вектора момента всех гидродинамических сил действующих на элементы (лопасти) движителя при его работе или равный ему по модулю момент скручивающий гребной вал непосредственно перед движителем.
Момент, необходимый для вращения изолированного движителя, (Torque of Isolated propulsor) Q –проекция на ось движителя вектора момента всех гидродинамических сил действующих на элементы (лопасти) изолированного движителя при его работе.
Сила засасывания (Thrust-deduction)  –дополнительное сопротивление, возникающее на корпусе при работе движителя (фактически возникает за счет разрежения, имеющего место в жидкости перед движителем).
–дополнительное сопротивление, возникающее на корпусе при работе движителя (фактически возникает за счет разрежения, имеющего место в жидкости перед движителем).
Коэффициент засасывания (Thrust-deduction fraction) t – отношение силы засасывания к упору движителя, а именно t = /T.
/T.
Тяга движителя (Effective thrust) TE - упор движителя минус сила засасывания, а именно TE =(T- )=T(1-t).
Эквивалентный изолированный движитель (Equivalent isolated propulsor) –изолированный движитель, геометрически, совпадающий с установленным на судне и развивающий при равной частоте вращения упор, равный той величине, которую он развивал за корпусом судна (обычно это определение относится к гребному винту). Расчетная скорость попутного потока (Design wake speed) VW –условная величина, характеризующая величину уменьшения по сравнению со скоростью судна скорости поступательного движения эквивалентного изолированного движителя при его испытаниях в свободной воде.
Коэффициент расчетного попутного потока (Wake fraction) WT –отношениерасчетной скорости попутного потока к скорости судна (WT =VW/V).
Расчетная скорость движителя (Speed of advance) VA – условная скорость движения эквивалентного изолированного движителя, равная скорости судна минус расчетная скорость попутного потока [VA=V-VW=V(1-WT)]. Или иначе поступательная скорость тележки в опытовом бассейне при испытаниях эквивалентного движителя в свободной воде (при этом геометрия, частота вращения и упор у основного и эквивалентного движителей одинаковы). Полезная мощность создаваемая движителем (Available capacity)TVA – произведение упора на расчетную скорость.
Буксировочная мощность (Towing capacity) RV – мощность, необходимая для буксировки «голого» корпуса судна без движителей.
Мощность, подводимая к движителю за корпусом (Delivered power)  -определяется произведением угловой скорости вращения вала
-определяется произведением угловой скорости вращения вала  на момент Q* ,т.е. =
на момент Q* ,т.е. =  . Мощность, подводимая к эквивалентному изолированному движителю (Delivered power of equivalent isolated propulsor) PD – определяется произведением угловой скорости вращения вала на момент Q , т.е. PD=
. Мощность, подводимая к эквивалентному изолированному движителю (Delivered power of equivalent isolated propulsor) PD – определяется произведением угловой скорости вращения вала на момент Q , т.е. PD=  .
.
Эффективность изолированного движителя (Open water efficiency)  -отношение полезной мощности, создаваемой изолированным движителем, к мощности, затраченной на работу движителя, т.е. определяется по формуле = TVA/PD. (можно называть этот коэффициент к.п.д. и его величина не может быть больше 1).
-отношение полезной мощности, создаваемой изолированным движителем, к мощности, затраченной на работу движителя, т.е. определяется по формуле = TVA/PD. (можно называть этот коэффициент к.п.д. и его величина не может быть больше 1).
Пропульсивный коэффициент (Propulsive efficiency)  - отношение полезной мощности поступательного движения судна к мощности, затраченной на работу движителя за корпусом, т.е. определяется формулой =RV/ . (нельзя называть этот коэффициент к.п.д., т.к., в принципе, он может быть больше 1).
- отношение полезной мощности поступательного движения судна к мощности, затраченной на работу движителя за корпусом, т.е. определяется формулой =RV/ . (нельзя называть этот коэффициент к.п.д., т.к., в принципе, он может быть больше 1).
Коэффициент влияния неравномерности поля скоростей за корпусом судна на момент (irregularity influence coefficient for torque)  - отношение мощности, подводимой к движителю за корпусом, к мощности, подводимой к эквивалентному изолированному движителю, а именно =Q*/Q.
- отношение мощности, подводимой к движителю за корпусом, к мощности, подводимой к эквивалентному изолированному движителю, а именно =Q*/Q.
Приведенные выше определения дают возможность получить связь между пропульсивным коэффициентом и эффективностью изолированного движителя ,а именно
=RV/ = TEV / = (TVA/PD) [(1-t)/(1-WT)](1/ )= [(1-t)/(1-WT)](1/ )
справедливой для одновального судна с открытым гребным винтом. Величину (1-t)/(1-WT) называют коэффициентом влияния корпуса, который учитывает влияние коэффициентов взаимодействия t и WT на пропульсивный коэффициент. Например, у хорошо спроектированного одновинтового судна коэффициент влияния корпуса больше единицы примерно на 15% за счет того, что WT соответственно больше t. Для двухвальных судов приведенная формула справедлива, если все величины в правой части брать для одного из двух одинаковых в этом случае движителей и, при этом, брать половину сопротивления.
В случае нескольких неодинаковых движителей или водометного движителя данная выше система определений соответствующим образом уточняется. В частности водометный движитель можно рассматривать как насос в криволинейном канале, но при этом дополнительно должно быть уточнено как определяется сопротивление (например, с закрытыми отверстиями канала), как определяется тяга и т.д.
2.Геометрия гребного винта.
Плоскость диска ГВ –плоскость перпендикулярная оси ГВ и содержащая все ОЛЛ.
Основная линия лопасти (ОЛЛ) – условная прямая, перпендикулярная оси и привязанная к конкретной лопасти так, что все остальные ОЛЛ, привязанные к другим лопастям, лежат в плоскости диска ГВ на одинаковом угловом расстоянии друг от друга.
Цилиндрическое сечение лопасти на данном радиусе r -сечение лопасти соосным цилиндром радиуса r .
Развернутое на плоскость цилиндрическое сечение -указанное выше цилиндрическое сечение развернутое на плоскость вместе с поверхностью цилиндра, при помощи которого получено это цилиндрическое сечение.
Уравнение правильной винтовой линии, содержащей хорду цилиндрического сечения на данном радиусе r, в соосной цилиндрической системе координат E(x,r,  ) имеет вид:
) имеет вид:
 , для ГВ правого вращения;
, для ГВ правого вращения;  , для ГВ левого вращения, (1)
, для ГВ левого вращения, (1)
где ось x – направлена по оси, с началом в плоскости диска ГВ, в сторону направления движения;  - откидка (rake) рассматриваемого цилиндрического сечения;
- откидка (rake) рассматриваемого цилиндрического сечения;
Шаг правильной винтовой линии это расстояние вдоль оси, которое проходит точка движущаяся по этой линии за один оборот вокруг оси (см. (1)).
Шаг гребного винта, точнее кромочный шаг ГВ на данном радиусе это шаг правильной винтовой линии, совпадающий с хордой, проходящей через переднюю и заднюю кромки цилиндрического сечения лопасти на рассматриваемом радиусе. Шаг обозначается P(r).
Шаговое отношение - отношение шага к диаметру P/D, взятое обычно на относительном радиусе 0.7.
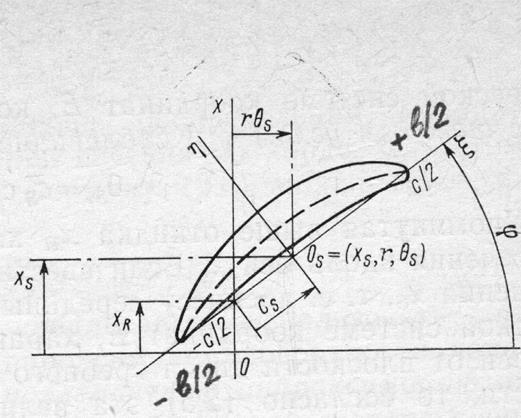
Локальная криволинейная система координат F(  )это система координат, предназначенная для описания цилиндрических сечений лопасти илежащая на поверхности соосного цилиндра радиуса r, первая координата направлена к передней кромке по указанной выше винтовой линии и совпадает с хордой цилиндрического сечения лопасти на радиусе r, начало системы F совпадает с серединой хорды, вторую координату удобно рассматривать в плоскости, на которую развернуто соответствующее цилиндрическое сечение, т.к. на этой плоскости вторая координата является прямой, перпендикулярной к хорде, при этом за положительное направление принято такое, которое совпадает с направлением от нагнетающей поверхности к засасывающей, т.е. от задней стороны лопасти к передней по ходу судна.
)это система координат, предназначенная для описания цилиндрических сечений лопасти илежащая на поверхности соосного цилиндра радиуса r, первая координата направлена к передней кромке по указанной выше винтовой линии и совпадает с хордой цилиндрического сечения лопасти на радиусе r, начало системы F совпадает с серединой хорды, вторую координату удобно рассматривать в плоскости, на которую развернуто соответствующее цилиндрическое сечение, т.к. на этой плоскости вторая координата является прямой, перпендикулярной к хорде, при этом за положительное направление принято такое, которое совпадает с направлением от нагнетающей поверхности к засасывающей, т.е. от задней стороны лопасти к передней по ходу судна.
Положение цилиндрического сечения лопасти в пространстве полностью определяется 4-мя параметрами:
r – радиус рассматриваемого цилиндрического сечения лопасти;
P – кромочный шаг этого сечения;
- откидка (rake);
 - саблевидность (skew).
- саблевидность (skew).
Математически роль этих параметров явствует из уравнений перехода от локальной системы координат F( )на радиусе r к цилиндрическойсоосной системе координатE(x,r, )
 ; (2)
; (2)
 , (3)
, (3)
где  - шаговый угол рассматриваемого сечения.
- шаговый угол рассматриваемого сечения.
Откидка (Rake) – смещение по оси x точки пересечения плоскости, содержащей ось винта и основную линию данной лопасти, с винтовой линией, содержащей хорду цилиндрического сечения на данного радиуса r; знак положителен, если указанная точка пересечения смещена вперед по ходу поступательного движения ГВ.
Саблевидность (Skew) – смещение середины хорды от плоскости, содержащей ось винта и основную линию данной лопасти, измеренное вдоль винтовой линии, содержащей хорду цилиндрического сечения на данного радиуса r; знак положителен, если середина хорды смещена в сторону входящей кромки. Обычно, для концевых цилиндрических сечений лопасти знак отрицателен.
Середина хорды цилиндрического сечения лопасти номер 1 на данном радиусе r имеет следующие координаты в цилиндрической системе координат E(x,r, )
 ; (4)
; (4)
 ; (5)
; (5)
 ; (6)
; (6)
Величина  называется полной откидкой и характеризует расстояние, измеренное вдоль оси, от середины хорды до диска ГВ, величина
называется полной откидкой и характеризует расстояние, измеренное вдоль оси, от середины хорды до диска ГВ, величина  называется углом саблевидности и характеризует смещение середины хорды рассматриваемого сечения по углу
называется углом саблевидности и характеризует смещение середины хорды рассматриваемого сечения по углу  от угла, соответствующего ОЛЛ рассматриваемой лопасти.
от угла, соответствующего ОЛЛ рассматриваемой лопасти.
Для характеристики геометрии цилиндрических сечений лопасти задаются в местной системе координат F( ) две функции  и
и  , т.е. ординаты передней (засасывающей) и задней (нагнетающей) сторон рассматриваемого сечения соответственно. При этом легко найти связь этих функций с распределением толщины
, т.е. ординаты передней (засасывающей) и задней (нагнетающей) сторон рассматриваемого сечения соответственно. При этом легко найти связь этих функций с распределением толщины  и распределением кривизны
и распределением кривизны  по хорде для этого цилиндрического сечения лопасти, а именно
по хорде для этого цилиндрического сечения лопасти, а именно
 ; (7)
; (7)
 ; (8)
; (8)
Максимум функции обозначается e, а отношение этой величины к длине хорды  называется максимальной относительной толщиной сечения. Максимум функции обозначается
называется максимальной относительной толщиной сечения. Максимум функции обозначается  , а отношение этой величины к длине хорды
, а отношение этой величины к длине хорды  называется максимальной относительной кривизной сечения.
называется максимальной относительной кривизной сечения.
Полное представление геометрии лопасти требует задания:
Трех параметров Z; D;  ;
;
Шести функций радиуса b(  )/D; P( )/D; ( )/D; ( )/D;
)/D; P( )/D; ( )/D; ( )/D;  ( )/D;
( )/D;  ( )/D; (часто указанные величины относят не к диаметру, а к радиусу ГВ R)
( )/D; (часто указанные величины относят не к диаметру, а к радиусу ГВ R)
Для каждого цилиндрического сечения, из числа задаваемых, должны быть известны две безразмерные функции по хорде /e; / .
Здесь дополнительно используются обозначения Z – число лопастей, D – диаметр, - радиус ступицы, b - ширина лопасти на данном радиусе r (длина хорды).
Дисковое отношение – отношение суммарной спрямленной площади лопастей к площади диска ГВ, а именно
 (9)
(9)
где R=D/2.
3.Классификация гидравлических движителей и историческая справка. Расположим различные конструктивные типы гидравлических движителей в порядке уменьшения частоты их применения на судах и других морских подвижных объектах.
3.1.Гребной винт фиксированного шага (ГВ). Наиболее распространенный гидравлический движитель. ГВ, как указывалось выше, это движитель, имеющий несколько крыловидных специально профилированных лопастей, закрепленных на ступице через равные угловые расстояния и способный при вращении создавать упор за счет образования подъемной силы на лопастях, при этом упор направлен по оси вращения ГВ в сторону движения, т.е. перпендикулярно плоскости вращения лопастей. Прообразом современного ГВ является изобретенный в 3 веке до нашей эры Архимедом (287-212гг. до н.э.) шнековый водоподъемный механизм. В 1475г. Леонардо да Винчи (1452-1519) в «Кодексе о полете птиц» нарисовал схему вертолета с одним архимедовым винтом, не обратив внимание на проблему парирования момента. В 1768г. английский ученый Пенктон опубликовал книгу «Теория винта Архимеда». В 1773г. американский механик Дэвид Бушнелл (1742-1826) установил горизонтальный и вертикальный гребные винты с ручным приводом на подводной лодке «Turtle» (Черепаха). В 1801г. французский изобретатель Роберт Фултон (1765-1815) провел испытания подводной лодки «Nautilus» с ГВ. В 1804г. Джон Стивенс испытал первый пароход с ГВ, который достиг скорости 4 узл. В 1827г. австрийский изобретатель Иосиф Рессель (в Чехии установлен памятник как изобретателю ГВ) получил патент на ГВ и в 1829 испытал пароход «La Civetta» с ГВ, который достиг скорости 6 узл. В 1836г. английский инженер Фрэнсис Смит построил бот с длинным деревянным архимедовым шнеком (два витка) в качестве движителя, при испытаниях половина шнека отломилась и скорость возросла до 8 узл. По заказу английского Адмиралтейства Фрэнсис Смит спроектировал и построил пароход «Архимед» с ГВ, имеющим диаметр 2.1м. и мощность 90 л.с. В 1840г. пароход «Стоктон» с ГВ пересек Атлантику. Его создатель шведский изобретатель Джон Эриксон (1803-1889) (в Стокгольме установлен памятник как изобретателю ГВ) основал в США компанию по строительству винтовых пароходов. В частности был построен винтовой пароходофрегат водоизмещением 950т. и мощностью 400 л.с. В 1848г. руссийский инженер И.А.Амосов построил первый в России винтовой пароход парусно-паровой фрегат «Архимед», мощностью 300 л.с. В 60-х годах прошлого века сначала на атомных подводных лодках, а затем и на различных надводных судах стали применять саблевидную форму контура лопастей (неправильно называть эти ГВ винтами с большой откидкой контура лопастей, как это делается иногда в публикациях) с целью снижения подводного шума, а также периодических сил и давлений, возникающих при работе ГВ в неравномерном поле скоростей. Первая серия саблевидных ГВ была испытана в Тейлоровском центре (Вашингтон, США) в 1971г. (Boswell R.J.). При большой саблевидности ( =36o¸72o)возрастает осевой габарит ГВ,что можно скорректировать, например, выбирая откидку таким образом, что середины хорд всех цилиндрических сечений лежат в плоскости диска ГВ, именно такой ГВ называют типа «WARPED».
3.2.Гребной винт регулируемого шага (ВРШ).Применяется часто на рыболовных судах, тральщиках, паромах и судах с несколькими режимами движения.ВРШ это гребной винт, каждая лопасть которого может поворачиваться вокруг перпендикулярной гребному валу оси. Механизм поворота расположен в ступице и управляется дистанционно с мостика судна. ВРШ позволяют при постоянных оборотах гребного вала изменять упор и даже осуществлять реверс без изменения направления вращения гребного вала за счет изменения угла установки лопасти относительно ступицы. В 1904г. Иван Григорьевич Бубнов применил ВРШ на первой российской дизельэлектрической подводной лодке «Минога». Первые серийные ВРШ появились 1935г. (фирма Эшер-Висс в Цурихе), в послевоенный период, начиная с 1945г. большую известность приобрели ВРШ шведской фирмы «KaMeWa».
3.3.Гребной винт в направляющей насадке.Применяется главным образом на буксирах, на крупнотоннажных танкерах и на тихоходных судах с ограниченной осадкой.На одновальных судах применение этого движительного комплекса целесообразно при коэффициенте нагрузки ГВ по упору (CTA) больше единицы, где  .Рассматриваемый комплекс состоит из ГВ, охваченного осесимметричным кольцевым крылом с минимальным зазором так, что поток в диске ГВ ускоряется. За счет этого тяга движителя возрастает на величину достигающую 50% по сравнению с ГВ без насадки. В 1925г. немецкий инженер Корт, убедившись неэффективности длинных водопроточных каналов для водометного движителя на буксире мощностью 120л.с. запатентовал комплекс ГВ в направляющей насадке, который первоначально назывался «водометный движитель с коротким водоводом и осевым насосом». Первое реальное применение насадки Корта было осуществлено в 1933г. В 1968г. российский инженер Вадим Кириллович Турбал в соавторстве с Ю.С.Зайцевой запатентовал «Осенесимметричную направляющую насадку на гребной винт», которая на крупнотоннажном танкере за счет выравнивания поля скоростей в диске ГВ существенно снизила периодические силы и моменты, действующие на гребной вал. В 1974г. такая насадка была установлена на танкере «Крым» вместе с ВРШ, который имел диаметр 7.5 м. и тперерабатывал 30000 л.с. В конце 70-х годов прошлого века в связи с ужесточением требований к акустическим характеристикам на торпедах и подводных лодках (например, на французской подводной лодке «Le Triomphant») начал применяться движитель представляющий собой многолопастный винт в насадке со спрямляющими поток специальными устройствами, который был назван «Pamp-jet» и который по существу является «водометным движителем с коротким водоводом и осевым насосом» плюс спрямляющее устройство.
.Рассматриваемый комплекс состоит из ГВ, охваченного осесимметричным кольцевым крылом с минимальным зазором так, что поток в диске ГВ ускоряется. За счет этого тяга движителя возрастает на величину достигающую 50% по сравнению с ГВ без насадки. В 1925г. немецкий инженер Корт, убедившись неэффективности длинных водопроточных каналов для водометного движителя на буксире мощностью 120л.с. запатентовал комплекс ГВ в направляющей насадке, который первоначально назывался «водометный движитель с коротким водоводом и осевым насосом». Первое реальное применение насадки Корта было осуществлено в 1933г. В 1968г. российский инженер Вадим Кириллович Турбал в соавторстве с Ю.С.Зайцевой запатентовал «Осенесимметричную направляющую насадку на гребной винт», которая на крупнотоннажном танкере за счет выравнивания поля скоростей в диске ГВ существенно снизила периодические силы и моменты, действующие на гребной вал. В 1974г. такая насадка была установлена на танкере «Крым» вместе с ВРШ, который имел диаметр 7.5 м. и тперерабатывал 30000 л.с. В конце 70-х годов прошлого века в связи с ужесточением требований к акустическим характеристикам на торпедах и подводных лодках (например, на французской подводной лодке «Le Triomphant») начал применяться движитель представляющий собой многолопастный винт в насадке со спрямляющими поток специальными устройствами, который был назван «Pamp-jet» и который по существу является «водометным движителем с коротким водоводом и осевым насосом» плюс спрямляющее устройство.
3.4.Водометный движительный комплекс (ВДК).Применяется на пассажирских скоростных катамаранах, судах на воздушной подушке скегового типа (СВП скегового типа) и на катерах.ВДК состоит из водопроточного канала, внутри которого имеется насос (осевой или центробежный), направляющее поток устройство, профилированный водозаборный участок (статического или полнонапорного типов) и сужающееся сопло формирующее струю, за счет выброса которой и образуется тяга движителя. Этот тип гидравлического движителя, как правило, имеет несколько меньшую эффективность по сравнению с открытым ГВ, но уникальная защищенность подвижных элементов, безопасность гидробионтов при сближении с судном, высокая эффективность при больших скоростях и особые акустические свойства делают в ряде случаев применение ВДК необходимым. В 1661г. английские изобретатели Томас и Джеймс получили привелегию на судно с ручным ВДК в виде раздувательных мехов. В 1753г. академик РАН Даниил Бернулли (1700-1782) в процессе участия в соответствующем конкурсе Парижской академии наук предложил и теоретически обосновал применение ВДК в качестве судового движителя. В 1798 английский изобретатель Рамси построил первый водометный катер «Колумбия Мейд». В 1839г. английский изобретатель Рутвен поставил на шлюпку водомет с центробежным насосом и с вертикальным водоводом на всасывании и двумя короткими каналами для образования струй на оба борта. В 1855г. С.О.Бурачек разработал проект водомета для российского парофрегата «Генерал-Адмирал». В 1883г. Торникрофт провел сравнительные испытания миноносок (15т., 167 л.с.) с ГВ и с ВДК, которые показали преимущество ГВ (17.3 узл. для корабля с ГВ и 12.6 узл. для корабля с ВДК). В 1962г. английский инженер Гамильтон разработал компактные ВДК для катеров мощностью 30-90 л.с. с целью движения по мелководным и каменистым рекам Новой Зеландии. В 1971г. два водомета по 6000 л.с. были установлены на СВП скегового типа «SES-100B», что обеспечило судну водоизмещением 114т. скорость 76 узл.. В 1975г. М.А.Мавлюдов изобрел «Вентилируемый водомет», отличительными чертами которого является выброс струи воды в воздух, отсутствие сопла и работа лопастей осевого насоса на выходе из водопроточного канала в режиме атмосферной супервентиляции. При этом, границы суперкаверн выполняют роль сопла, формирующего струю. Первая установка «Вентилируемого водомета» была осуществлена в России в 1980г. на 100 тонном катере «Серна» (30 узл., 3000x2 л.с.).
3.5.Крыльчатый движитель (КД). Единственная используемая реализация идеи машущего крыла для движения морских самодвижущихся объектов (тральщики, буровые суда, плавучие краны, судовые подруливающие устройства). КД состоитиз вертикально расположенных крыльев, движущихся по кругу вместе с горизонтальной круглой платформой и одновременно совершающих колебания вокруг вертикальных осей проходящих через центр давлений каждого крыла-лопасти. Управляя законом колебания крыльев-лопастей можно плавно управлять как величиной, так и направлением упора КД. Изобрел КД в 1681г. английский физик Роберт Гук (1635-1703). Независимо друг от друга позже были разработаны две различные конструкции управления колебаниями крыльев-лопастей КД, которые называются «Кристен-Боинг» (1925г.) и «Фойт-Шнейдер» (1928г.). Серийный выпуск КД в 1931г. наладила немецкая фирма Фойта.
3.6.Соосные гребные винты противоположного вращения.Используя соосные гребные валы, один из которых изготавливается полым, а другой проходит внутри него и вращается в противоположную сторону, обеспечивается вращение двух расположенных друг за другом соосных ГВ в разные стороны. При этом один винт должен быть правого вращения, а другой левого так, чтобы оба создавали упор в одну сторону, в сторону движения. Задний винт обычно имеет немного меньший диаметр, соответствующий диаметру сужающейся струи, образующейся за передним ГВ. Задний ГВ использует часть кинетической энергии этой закрученной в противоположную направлению вращения заднего ГВ струи. За счет этого позади соосной пары ГВ противоположного вращения в гидродинамическом следе заметно снижаются потери на окружные вызванные скорости по сравнению с одиночным ГВ. Выигрыш по эффективности соосной пары ГВ противоположного вращения по сравнению с одиночным ГВ может достигать 16%. Применение соосной пары ГВ противоположного вращения тормозится сложностью конструкции. Исключение составляют торпеды, для которых этот тип движителя применяется широко в связи с тем, что при его применении легко решается проблема парирования кренящего момента. Надо отметить широкое применение соосной пары ГВ противоположного вращения в самолетостроении и в вертолетостроении. В 1754г. академик РАН Михаил Васильевич Ломоносов (1711-1765) продемонстрировал «аэродромическую машину», способную при помощи соосной пары ГВ противоположного вращения и пружинного механизма создать подъемную силу величиной около двух золотников (8.5 грамма). Эта модель вертолета еще не летала, но прблема парирования момента уже была решена изобретением соосной пары ГВ противоположного вращения. В 1784г. Лонуа и Бьенвеню продемонстрировали полет модели вертолета (геликоптера) с соосной парой ГВ противоположного вращения, которые вращались при помощи тетивы небольшого лука. В 1824г. французский изобретатель Доллман предложил применить соосную пару ГВ противоположного вращения в качестве судового гидравлического движителя. В 1836г. шведский изобретатель Джон Эриксон переизобрел рассматриваемый тип движителя. В Стокгольме ему воздвигнут монумент как изобретателю ГВ. В 1988г. в Японии построено два крупных судна, оборудованных соосными парами ГВ противоположного вращения (мощностью 11400 кВт. и 6540 кВт.). Экономия мощности при неизменной скорости по сравнению с одновинтовым вариантом в обоих случаях составила 16%.
3.7.Гребной винт на поворотной колонке с электроприводом, расположенным внутри колонки. AZIPOD (Azimuthing Podded Drive) Является движителем в составе дизель-электрического пропульсивного комплекса. Может поворачиваться на 360 градусов вокруг вертикальной оси. Получил применение на круизных судах, где обеспечил низкий уровень вибрации, повышенную управляемость при отсутствии традиционного руля и отсутствие механической передачи мощности на ГВ. Изобретен в США в 1979г.; переизобретен в Финляндии в 1990г.; первая установка на финском вспомогательном судне “Seli”; в 1998г. фирмами «Kvaerner Masa-Yards» и «ABB Industry» установлено два АЗИПОДа по 14000kВт. на круизном лайнере типа «Festival».
3.8.Гребной винт с колесом профессора Грима На ступице обычного ГВ позади основного ГВ устанавливается свободновращающийся турбопропеллер, называемое колесом Грима (КГ). КГ имеет обычно 7 или 9 лопастей и на 20% больший чем основной ГВ диаметр. Вращается КГ без подвода мощности в сторону вращения основного ГВ, но медленнее его, за счет гидродинамического взаимодействия со струей основного ГВ. Внутренние сечения КГ профилируются как турбина и утилизируют кинетическую энергию закрученной струи, образующейся за основным ГВ. Внешние сечения, лежащие на концевых 25% лопастей профилируются как ГВ и создают дополнительный упор, достигающий 9%. КГ установлены более чем на 50 судах различного назначения. В 1966г. немецкий профессор из Гамбурга Отто Грим опубликовал идею КГ, но получил патент лишь в 1968г. после того, как аналогичная идея была запатентована в Японии (1966г.). Наибольшее по диаметру девяти лопастное КГ (диаметром 11.64м., диаметр основного ГВ равен 9.5м.) было установлено на японском танкере «T.Y.Draco» в 1989г.. Достигнутая при этом экономия топлива составила 8%. После поломки одного из двух КГ, установленных на лайнере «Куин Элизабет» и смерти
Грима установка КГ на судах прекратилась.
3.9.Гребной винт, свободный от концевых вихрей (tip vortex free-TVF). Обычный ГВ, на концах лопастей которого установлены небольшие профилированные пластины, перпендикулярные радиальному направлению. Имеется много модификаций этой конструкции, которые объединяются под названием «ГВ с модифицированными концами лопастей» (tip-modified propeller). К ним относятся «Гронинген пропеллер», разработанный голландским ученым Спаренбергом в 1981г., «Пропеллер с укороченным и нагруженным концом» (CLT), испытанный в натурных условиях английским инженером Аноном, «Каппел пропеллер», предложенный в 1976г. американским изобретателем Каппелем, «Пропеллер с крылышками на концах лопастей» (Bladelet), разработанный в 1986г. японским специалистом Итохи. Одна из наиболее разрекламированных конструкций была предложена в 1980г. испанским изобретателем Гомесом (Gomes G.P.) и называлась гребной винт, свободный от концевых вихрей (TVF). Изобретатель ошибочно считал, что небольшие профилированные пластины на концах лопастей могут полностью ликвидировать концевые вихри и тем самым уменьшить индуктивное сопротивление. Тем не менее, некоторое снижение интенсивности концевых вихрей имело место, что давало увеличение эффективности движителя лишь на несколько процентов (сопротивление трения при этом увеличивалось и снижало выигрыш, особенно при слабой нагрузке). Широкого распространения гребной винт, свободный от концевых вихрей не получил.
3.10.Суперкавитирующий гребной винт (СКВ).От обычного ГВ отличается клиновидной или специальной сегментной профилировкой, обеспечивающей на расчетном режиме такое развитие кавитации, что образующиеся на засасывающей стороне лопастей суперкаверны замыкаются в следе за лопастью, не вызывая эрозионных повреждений поверхности лопасти. Широкого применения на скоростных судах не получил, т.к. не выдержал конкуренции с водометным движительным комплексом (для скоростных катамаранов) и с частично погруженным гребным винтом (для рекордно скоростных катеров и СВП скегового типа). Изобрел СКВ в 1941г. академик РАН профессор Ленинградского Кораблестроительного института Валентин Львович Поздюнин. Первый двухлопастной СКВ был установлен на американском судне на подводных крыльях “Denison” (80т.,60 узл., 10000л.с.). Автор этого проекта американский профессор Маршал Тулин. В 1980г. в СССР было создано самое крупное в мире судно на подводных крыльях “Сокол” (465т.,63 узл., 18000л.с.), на котором было установлено на трех угловых колонках шесть СКВ.
3.11.Частично погруженный гребной винт (ЧПГВ) или гребной винт, пересекающий свободную поверхность (Surface piecing propeller). Принцип действия ясен из названия. Применяется на скоростных судах (СПК, СВП скегового типа, спортивные катера Формулы-1), когда скорость так велика, что уже не избежать кавитации и подводные выступающие части недопустимо увеличивают сопротивление. Работает в режиме атмосферной супервентиляции, но иногда в нижнем положении на лопастях возникает и естественная кавитация, что нежелательно. Главный недостаток значительные переменные силы и моменты, а также значительная боковая сила, действующие на движитель. Впервые установлен в 1963 г. в России на судне на подводных крыльях Ракета-М (1200 л.с., 50 пассажиров). Два наиболее мощных ЧПГВ установлено в 1971г. на американском скеговом судне на воздушной подушке «SES-100B», (105 т., 90.3 узл., 7500x2 л.с.).
Для полноты классификации необходимо дополнить указанный список типами судовых движителей, имевших историческое значение и применяемых до сих пор в спортивном судостроении и в индустрии развлечений. Это парус, весло, колесо с подвижными или неподвижными плицами, движитель типа машущее крыло, парные ласты, моноласт.
Перечислим в заключении два типа гидравлических движителей, не получивших распространения, но интенсивно изучавшихся за последние 100 лет. Это движитель типа машущее крыло (см. крыльчатый движитель, который, вопреки традиции, следует отнести к этому типу движителей) и магнитогидродинамический движитель (1961 г.), вызвавший в свое время большой интерес.
Дата добавления: 2017-03-29; просмотров: 624;