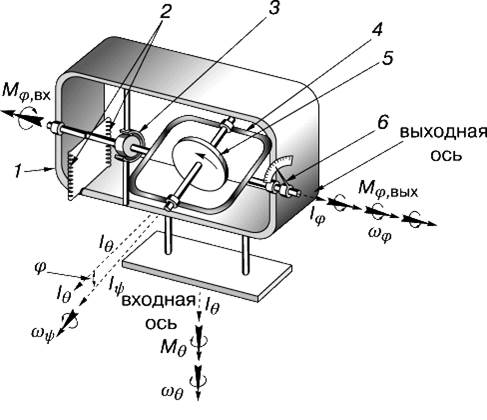
Гироскопический указатель курса.
На рис. 2 показан пример применения трехстепенного гироскопа в авиационном указателе курса (гирополукомпасе). Вращение ротора в шарикоподшипниках создается и поддерживается струей сжатого воздуха, направленной на рифленую поверхность обода. Внутренняя и наружная рамки карданова подвеса обеспечивают полную свободу вращения оси собственного вращения ротора. По шкале азимута, прикрепленной к наружной рамке, можно ввести любое значение азимута, выровняв ось собственного вращения ротора с основанием прибора. Трение в подшипниках столь незначительно, что после того как это значение азимута введено, ось вращения ротора сохраняет заданное положение в пространстве, и, пользуясь стрелкой, скрепленной с основанием, по шкале азимута можно контролировать поворот самолета. Показания поворота не обнаруживают никаких отклонений, если не считать эффектов дрейфа, связанных с несовершенствами механизма, и не требуют связи с внешними (например, наземными) средствами навигации.
ДВУХСТЕПЕННЫЙ ГИРОСКОП
Во многих гироскопических приборах используется упрощенный, двухстепенный вариант гироскопа, в котором наружная рамка трехстепенного гироскопа устранена, а полуоси внутренней закрепляются непосредственно в стенках корпуса, жестко связанного с движущимся объектом. Если в таком устройстве единственная рамка ничем не ограничена, то момент внешней силы относительно оси, связанной с корпусом и перпендикулярной оси рамки, заставит ось собственного вращения ротора непрерывно прецессировать в сторону от этого первоначального направления. Прецессия будет продолжаться до тех пор, пока ось собственного вращения не окажется параллельной направлению момента силы, т.е. в положении, при котором гироскопический эффект отсутствует. На практике такая возможность исключается благодаря тому, что задаются условия, при которых поворот рамки относительно корпуса не выходит за пределы малого угла.
Если прецессия ограничивается только инерционной реакцией рамки с ротором, то угол поворота рамки в любой момент времени определяется проинтегрированным ускоряющим моментом. Поскольку момент инерции рамки обычно сравнительно мал, она слишком быстро реагирует на вынужденное вращение. Имеются два способа устранить этот недостаток.
Противодействующая пружина и вязкостный демпфер.
Датчик угловой скорости.
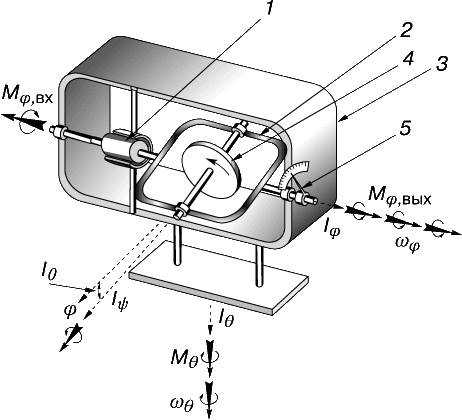
Прецессию оси вращения ротора в направлении вектора момента силы, направленного вдоль оси, перпендикулярной оси рамки, можно ограничить пружиной и демпфером, воздействующими на ось рамки. Кинематическая схема двухстепенного гироскопа с противодействующей пружиной представлена на рис. 3. Ось вращающегося ротора закреплена в рамке перпендикулярно оси вращения последней относительно корпуса. Входной осью гироскопа называется направление, связанное с основанием, перпендикулярное оси рамки и оси собственного вращения ротора при недеформированной пружине.
Момент внешней силы относительно опорной оси вращения ротора, приложенный к основанию в тот момент времени, когда основание не вращается в инерциальном пространстве и, следовательно, ось вращения ротора совпадает со своим опорным направлением, заставляет ось вращения ротора прецессировать в сторону входной оси, так что угол отклонения рамки начинает увеличиваться. Это эквивалентно приложению момента силы к противодействующей пружине, в чем состоит важная функция ротора, который в ответ на возникновение входного момента силы создает момент силы относительно выходной оси (рис. 3). При постоянной входной угловой скорости выходной момент силы гироскопа продолжает деформировать пружину, пока создаваемый ею момент силы, воздействующий на рамку, не заставит ось вращения ротора прецессировать вокруг входной оси. Когда скорость такой прецессии, вызванной моментом, создаваемым пружиной, сравняется с входной угловой скоростью, достигается равновесие и угол рамки перестает изменяться. Таким образом, угол отклонения рамки гироскопа (рис. 3), указываемый стрелкой на шкале, позволяет судить о направлении и угловой скорости поворота движущегося объекта.
На рис. 4 показаны основные элементы указателя (датчика) угловой скорости, ставшего в настоящее время одним из самых обычных авиакосмических приборов.

Вязкостное демпфирование.
Для гашения выходного момента силы относительно оси двухстепенного гироузла можно использовать вязкостное демпфирование. Кинематическая схема такого устройства представлена на рис. 5; она отличается от схемы на рис. 4 тем, что здесь нет противодействующей пружины, а вязкостный демпфер увеличен. Когда такое устройство поворачивается с постоянной угловой скоростью вокруг входной оси, выходной момент гироузла заставляет рамку прецессировать вокруг выходной оси. За вычетом эффектов инерционной реакции (с инерцией рамки связано в основном лишь некоторое запаздывание отклика) этот момент уравновешивается моментом сил вязкостного сопротивления, создаваемым демпфером. Момент демпфера пропорционален угловой скорости вращения рамки относительно корпуса, так что выходной момент гироузла тоже пропорционален этой угловой скорости. Поскольку этот выходной момент пропорционален входной угловой скорости (при малых выходных углах рамки), выходной угол рамки увеличивается по мере того, как корпус поворачивается вокруг входной оси. Стрелка, движущаяся по шкале (рис. 5), указывает угол поворота рамки. Показания пропорциональны интегралу угловой скорости вращения относительно входной оси в инерциальном пространстве, и поэтому устройство, схема которого представлена на рис. 5, называется интегрирующим двухстепенным гиродатчиком.
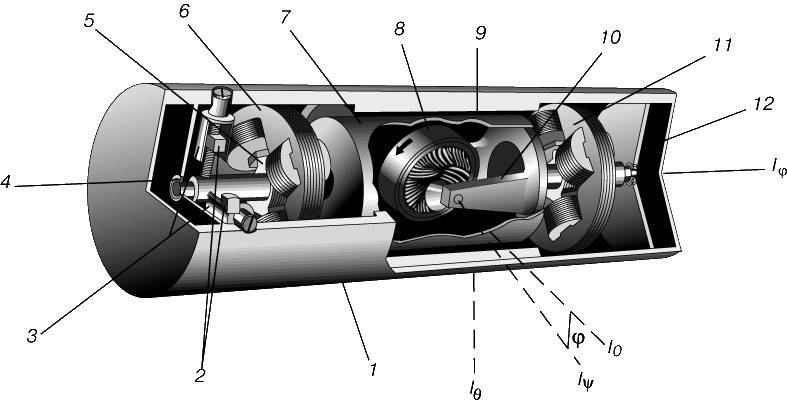
На рис. 6 изображен интегрирующий гиродатчик, ротор (гиромотор) которого заключен в герметично запаянный стакан, плавающий в демпфирующей жидкости. Сигнал угла поворота плавающей рамки относительно корпуса вырабатывается индукционным датчиком угла. Положение поплавкового гироузла в корпусе задает датчик момента в соответствии с поступающими на него электрическими сигналами. Интегрирующие гиродатчики обычно устанавливают на элементах, снабженных сервоприводом и управляемых выходными сигналами гироскопа. При таком расположении выходной сигнал датчика момента можно использовать как команду на поворот объекта в инерциальном пространстве. .
ГИРОКОМПАС
ГИРОКОМПАС, прибор, указывающий направление на земной поверхности; в его состав входит один или несколько гироскопов. Используется почти повсеместно в системах навигации и управления крупных морских судов; в отличие от магнитного компаса его показания связаны с направлением на истинный географический (а не магнитный) Северный полюс. Прототип современного гирокомпаса первым создал Г.Аншюц-Кэмпфе (запатентован в 1908), вскоре подобный прибор построил Э.Сперри (запатентован в 1911). В последующие годы разрабатывалось множество гирокомпасов различных модификаций, но наиболее удачные из них принципиально почти не отличались от устройств Аншюца и Сперри. Приборы современной конструкции значительно усовершенствованы по сравнению с первыми моделями; они отличаются высокой точностью и надежностью и удобнее в эксплуатации.
Применение.
В связи с длительным использованием гирокомпаса необходимо, чтобы его высокая точность оставалась неизменной в течение многих недель и даже месяцев. Поэтому он конструируется и изготавливается с соблюдением жестких требований по точности, а в процессе эксплуатации подлежит тщательному периодическому обслуживанию. Обычно гирокомпас применяется как опорное навигационное устройство в судовых рулевых системах с ручным или автоматическим управлением, а также при решении различных задач иного рода, например, для определения точного направления при наводке орудия боевого корабля. Морской гирокомпас, как правило, очень тяжел; в некоторых конструкциях вес гироскопического ротора превышает 25 кг. Для нормальной работы гирокомпаса необходимо устойчивое основание, не испытывающее ускорений и фиксированное относительно земной поверхности, причем скорость его перемещения должна быть пренебрежимо мала по сравнению со скоростью суточного вращения Земли на данной широте. Эти условия не соблюдаются на самолете, поэтому применение гирокомпаса ограничено морскими судами.
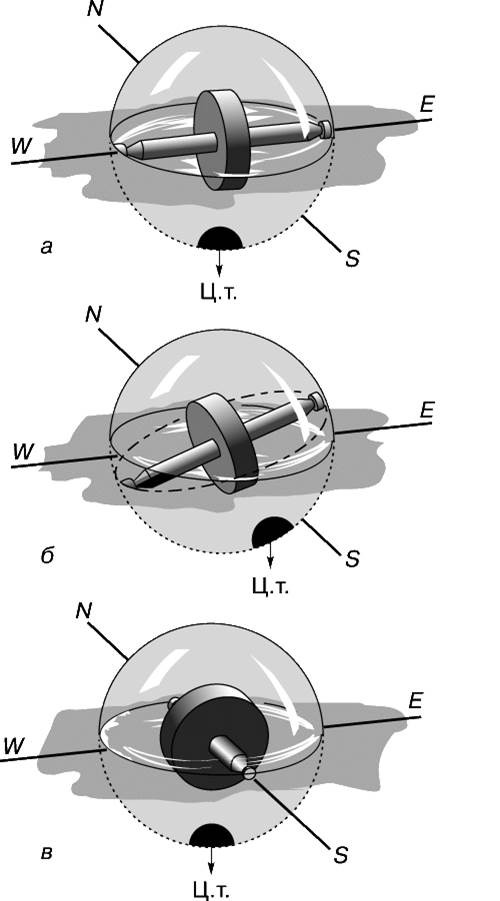
Принцип действия
гирокомпаса можно описать с помощью упрощенной схемы, приведенной на рисунке. Простейший гирокомпас состоит из гироскопа, подвешенного внутри полого шара, который плавает в жидкости; вес шара с гироскопом таков, что его центр тяжести располагается на оси шара в его нижней части, когда ось вращения гироскопа горизонтальна. Предположим, что гирокомпас находится на экваторе, а ось вращения его гироскопа совпадает с направлением запад – восток (позиция a); она сохраняет свою ориентацию в пространстве в отсутствие воздействия внешних сил. Но Земля вращается, совершая один оборот в сутки. Так как наблюдатель, находящийся рядом, вращается вместе с планетой, он видит, как восточный конец (E) оси гироскопа поднимается, а западный (W) опускается; при этом центр тяжести шара смещается к востоку и вверх (позиция б). Однако сила земного притяжения препятствует такому смещению центра тяжести, и в результате ее воздействия ось гироскопа поворачивается так, чтобы совпасть с осью суточного вращения Земли, т. е. с направлением север – юг (это вращательное движение оси гироскопа под действием внешней силы называется прецессией). Когда ось гироскопа совпадет с направлением север – юг (N – S, позиция в), центр тяжести окажется в нижнем положении на вертикали и причина прецессии исчезнет. Поставив метку «Север» (N) на то место шара, в которое упирается соответствующий конец оси гироскопа, и соотнеся ей шкалу с нужными делениями, получают надежный компас. В реальном гирокомпасе предусмотрены компенсация девиации компаса и поправка на широту места. Действие гирокомпаса зависит от вращения Земли и особенностей взаимодействия ротора гироскопа с его подвесом.
Дата добавления: 2019-02-07; просмотров: 1392;