Управление индуктивностью
Из основной формулы трансформаторнй ЭДС (2.13) следует, что магнитный поток однозначно связан с величиной приложенного напряжения и не зависит от материала сердечника. Из курса общей физики известно, что потокосцепление (ψ) связано с током ( i ) коэффициентом пропорциональности ( L)
ψ= L* i (2.14)
На основании закона полного тока для магнитной цепи выполняется соотношение
Н * lср = i * W, (2.15)
где lср – длина средней магнитной силовой линии сердечника,
W – число витков,
H – напряжённость магнитного поля.
Найдём этот коэффициент пропорциональности, который называют индуктивностью (L)
 , ( 2.16)
, ( 2.16)
где  – абсолютная магнитная проницаемость; s – сечение магнитопровода. Отношение
– абсолютная магнитная проницаемость; s – сечение магнитопровода. Отношение  – называют магнитным сопротивлением. Тогда
– называют магнитным сопротивлением. Тогда
 , ( 2.17)
, ( 2.17)
то есть индуктивность пропорциональна квадрату числа витков.
Индуктивность измеряется в генри (  ). Воздействовать на индуктивность можно двумя путями, которые ведут к одному – увеличению RМ, то есть индуктивность можно только уменьшать.
). Воздействовать на индуктивность можно двумя путями, которые ведут к одному – увеличению RМ, то есть индуктивность можно только уменьшать.
Первый путь – введение немагнитного зазора шириной  в магнитную цепь (рис.2.10), который существенно влияет на результирующую магнитную проницаемость.
в магнитную цепь (рис.2.10), который существенно влияет на результирующую магнитную проницаемость.
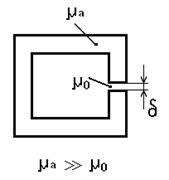
Рисунок 2.10 – Введение немагнитного зазора шириной 
Зависимости  и результирующей магнитной проницаемости
и результирующей магнитной проницаемости  при различной ширине зазора приведены на рис.2.11.
при различной ширине зазора приведены на рис.2.11.
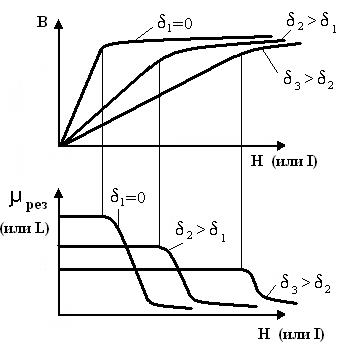
Рисунок 2.11 – Влияние немагнитного зазора на индуктивность
Видно, что при увеличении зазора индуктивность падает, но расширяется область независимости индуктивности от тока нагрузки. Это используется в дросселях сглаживающих фильтров, когда постоянная составляющая тока нагрузки может сместить рабочую точку в область насыщения, где индуктивность практически равна нулю и переменная составляющая проходит в нагрузку. Величина зазора выбирается минимально возможной и находится в пределах от долей до единиц миллиметров.
Второй путь– введение постоянного подмагничивания сердечника. Схема управления индуктивностью рабочей обмотки показана на рис.2.12.
Индуктивность LУ служит для ограничения тока индуцированного в обмотке WУПР из рабочей обмотки WР. Для магнитопровода по любой обмотке (рабочей или управляющей) справедливо соотношение (2.15)
Н * lср = Iр * Wр или Н * lср = IУПР * WУПР ,
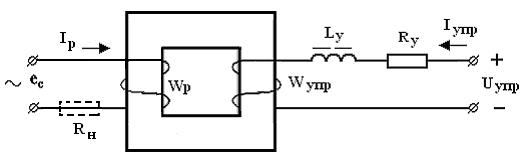
Рисунок 2.12 – Схема управления индуктивностью
откуда следует, что изменение тока управления приводит к изменению напряженности в сердечнике и, следовательно, индуктивности рабочей обмотки. Здесь имеет место электронное управление индуктивностью рабочей обмотки, то есть LР =F(IУПР). Эта зависимость приведена на рис.2.13.
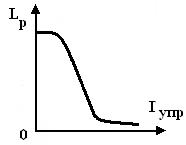
Рисунок 2.13 – Зависимость индуктивности от тока управлении
Если в цепь рабочей обмотки включить сопротивление нагрузки (Rн), как показано на рис.2.12, то путём изменения IУПР можно в широких пределах изменять ток рабочей обмотки и мощность в нагрузке. На этом принципе работают магнитные усилители (МУ), которым присущи: высокий КПД ( 0,85… 0,95 ), широкий диапазон рабочих температур (буквально до точки Кюри), высокие надёжность и чувствительность (сигналы до 10-17 Вт), радиационная стойкость. Основная характеристика МУ вход – выход, то есть зависимость тока рабочей обмотки от тока управления. Она приведена на рисунке 2.14.
Эта характеристика не чувствительна к знаку тока управления, поэтому МУ называются однотактными, нейтральными или нереверсивными. Коэффициент усиления по току равен
Кi=∆Iр/∆Iупр =Wупр/Wр. ( 2.18)
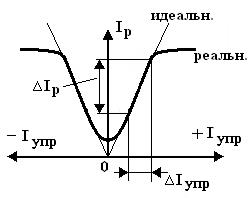
Рисунок 2.14 – Зависимость тока нагрузки (IР) от тока управления
Число витков управляющей обмотки может быть очень большим, поэтому можно управлять десятками киловатт с помощью очень малых токов, так как здесь важны ампервитки – произведение IУПР * WУПР. В этом заключается только принцип действия, а на практике применяют более сложные и совершенные схемы МУ. К недостаткам магнитных усилителей можно отнести: инерционность (рабочий диапазон частот ферромагнетиков – сотни килогерц) и нелинейные искажения сигналов за счёт гистерезиса. Поэтому областью применения МУ остаются системы автоматики, управление приводами механизмов и предварительная стабилизация напряжения в мощных системах.
Трансформаторы
Основные понятия и классификация трансформаторов
Трансформатор - это статический электромагнитный аппарат, преобразующий параметры электрической энергии переменного тока (напряжение, ток, форму, число фаз и пр.). Трансформатор представляет собой магнитопровод с нанесенной на него одной или несколькими обмотками [1].
В зависимости от назначения трансформаторы делят на силовые, согласующие и импульсные.
По схемному исполнению различают однообмоточные или автотрансформаторы и многообмоточные (рис.2.15).
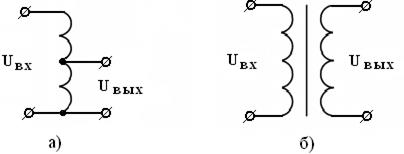
Рисунок 2.15–Автотрансформатор (а) и многообмоточный трансформатор (б)
По конструктивному исполнению трансформаторы различают: броневые, стержневые, тороидальные, трёхфазные, кольцевые и кабельные. Все они отличаются условиями охлаждения и индуктивностью рассеяния. Расположение обмоток на магнитопроводах (сердечниках) чёрным цветом показано на рис.2.16.
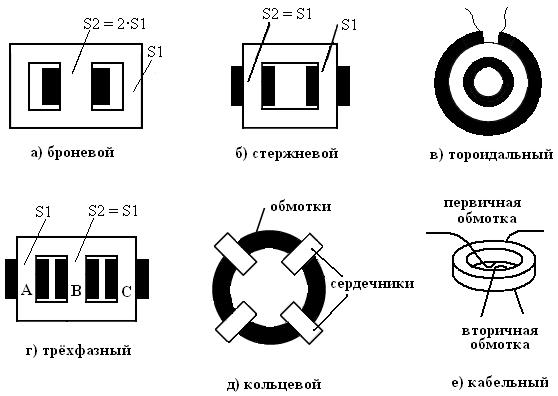
Рисунок 2.16 – Конструктивное исполнение трансформаторов
Часть магнитопровода, на которую нанесена обмотка, называется стержень, а открытая часть – ярмо. Наименьшей индуктивностью рассеяния обладает тороидальный трансформатор (весь магнитопровод охвачен обмотками!), а наибольшей – кабельный. Наихудшими условиями охлаждения сердечника также обладает тороидальный трансформатор, поскольку потерям (теплу) из сердечника уходить некуда. Наиболее известны и распространены первые три конструкции. Их расположение в порядке возрастания индуктивности рассеяния: в, б, а. Расположение в порядке улучшения условий охлаждения сердечника такое же: в, б, а. Именно проблема отвода тепла привела к появлению трансформаторов с воздушными радиаторами, с водяным и с масляным охлаждением, но это уже специальные типы трансформаторов.
Дата добавления: 2017-09-19; просмотров: 608;