Колебания и стабилизация управляемых колес
Во время движения управляемые колеса автомобиля, имеющего зависимую подвеску, могут колебаться вместе с передним мостом в вертикальной плоскости, а вместе с рулевой трапецией – вокруг шкворней (осей поворота) в горизонтальной плоскости. Угловые колебания управляемых колес вокруг шкворней недопустимы, т.к. детали ходовой части и рулевого управления воспринимают при этом значительные знакопеременные динамические нагрузки, а колебания с большой амплитудой приводят к потере автомобилем управляемости. Наиболее опасными являются устойчивые колебания колес, т.е. такие, которые непрерывно повторяются (самовозбуждаются).
Причинами, вызывающими эти колебания, являются гироскопическая связь управляемых колес, их неуравновешенность (дисбаланс) и двойная связь колес с несущей системой (рама, кузов) через рулевой привод и подвеску.
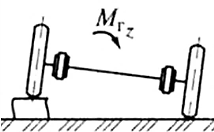
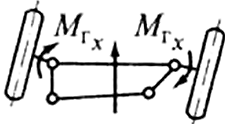
Передние колеса движущегося автомобиля представляют собой гироскопы и реагируют на всякое угловое перемещение их оси вращения. При наезде одного из колес на неровность дороги происходит перекос переднего моста. Управляемые колеса наклоняются, и изменяется положение их оси вращения. Это приводит к возникновению гироскопического момента Μrz, который действует в горизонтальной плоскости и поворачивает управляемые колеса вокруг шкворней (рис. 9.5, а). Поворот колес вокруг шкворней вызывает появление другого гироскопического момента Μrх, действующего в вертикальной плоскости и стремящегося увеличить перекос моста и наклон колес (рис. 9.5, б).
 а а
|  б б
|
а – вертикальные колебания; б – горизонтальные колебания
Рисунок 9.5 – Схема возникновения колебаний управляемых колес при зависимой подвеске
Таким образом, перекос переднего моста вызывает угловые колебания управляемых колес вокруг шкворней, которые в свою очередь увеличивают перекос моста. С увеличением скорости движения гироскопическая связь усиливается и колебания возникнув, продолжаются даже после того, как колесо съехало с неровности.
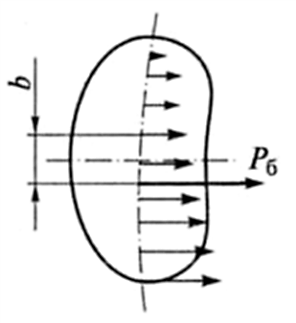
Могут также возникнуть вынужденные колебания, вызванные периодическим действием возмущающей силы, например, за счет дисбаланса (неуравновешенности) управляемых колес (рис 9.6).
При качении неуравновешенного колеса возникает центробежная сила (Рц), горизонтальная составляющая которой (Рх) пытается повернуть колесо относительно шкворня, а вертикальная составляющая (Рz) – переместить колесо в вертикальном направлении. При качении колеса направление центробежной силы непрерывно меняется, что приводит к его вилянию. Наиболее неблагоприятным является случай, когда оба колеса имеют дисбаланс и неуравновешенные участки расположены в одной плоскости, но с разных сторон от оси вращения колес. В этом случае поворачивающие моменты, действующие на колеса, складываются, и угловые колебания становятся особенно сильными.
Основным средством уменьшения угловых колебаний колес является применение независимой передней подвески. В этом случае большой наклон при вертикальных перемещениях управляемых колес не происходит.
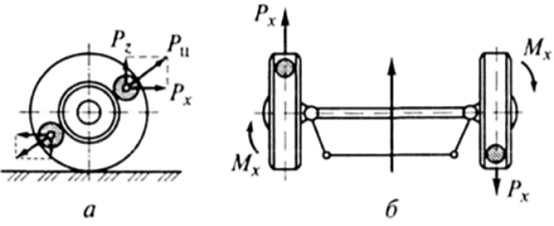
а – силы, действующие на неуравновешенные колеса; б – схема возникновения поворачивающего момента
Рисунок 9.6 – Дисбаланс управляемых колес
Явным признаком дисбаланса управляемых колес является биение рулевого колеса в процессе движения.
При движении на управляемые колеса автомобиля всегда действуют различные силы (толчки от неровностей дороги, боковой ветер, и др.), стремящиеся отклонить их от нейтрального положения. Это может явиться причиной неустойчивого движения автомобиля.
Устойчивое движение автомобиля обеспечивается стабилизацией управляемых колес, то есть их свойством сохранять нейтральное положение, занимаемое ими при прямолинейном движении, и автоматически в него возвращаться. Стабилизация управляемых колес обеспечивается наклоном шкворня (оси поворота колес) в поперечной и продольной плоскостях, а также упругими свойствами пневматической шины. Это создает соответственно весовой, скоростной и упругий стабилизирующие моменты.
Весовой стабилизирующий момент(рис. 9.7, а) возникает вследствие поперечного наклона шкворня или оси поворота управляемого колеса при бесшкворневой подвеске.
 а а
|  б б
|  в в
|
а – весовой стабилизирующий момент; б – скоростной стабилизирующий момент;
в – упругий стабилизирующий момент
Рисунок 9.7 – Стабилизация управляемых колес
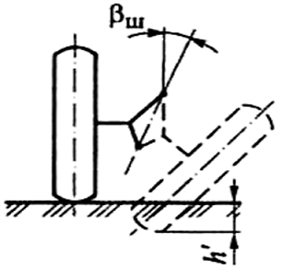
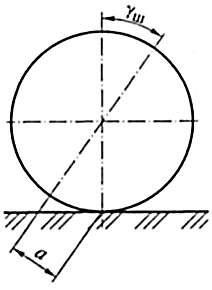
Скоростной стабилизирующий момент создается в результате продольного наклона шкворня. Продольный наклон оси поворота (рис. 9.7, б), определяемый углом γш, создает плечо (а) действия реакций дороги, возникающих при повороте колес между шиной и дорогой в месте их касания.
Упругий стабилизирующий момент шины создается при повороте управляемого колеса вследствие смещения результирующей боковых сил, действующих в месте контакта шины с дорогой, относительно центра контактной площадки (рис. 9.7, в).
Стабилизация управляемых колес неразрывно связана с установкой управляемых колес автомобиля. Управляемые колеса устанавливают на автомобиле с развалом в вертикальной и со схождением в горизонтальной плоскости.
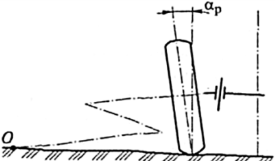
Углом развала управляемых колес (αр) – угол (рис.9.8, а), заключённый между плоскостью колеса и вертикальной плоскостью. Он считается положительным, если колесо наклонено от автомобиля наружу, и отрицательным при наклоне колеса внутрь.
 а а
|  б б
|
а – развал; б – схождение; А, Б – расстояния между задними и передними частями колес
Рисунок 9.8 – Схемы установки управляемых колес
Угол схождения управляемых колес (δс) определяется разностью расстоянийA иБ между колесами, которые измеряют сзади и спереди по краям ободьев на высоте оси колес.
Контрольные вопросы
1. Что такое управляемость автомобиля?
2.Какие силы действуют на автомобиль при повороте?
3.Какие параметры влияют на критическую скорость по условию управляемости?
4. Что такое боковой увод шин и почему он возникает?
5. Что такое недостаточная, нейтральная и избыточная поворачиваемость?
6. Какие параметры влияют на креновую поворачиваемость автомобиля?
7. Что понимают под колебанием и стабилизацией управляемых колес?
8.Как обеспечивают стабилизацию и установку управляемых колес?
Лекция10
Дата добавления: 2017-06-02; просмотров: 2611;