Применение микропроцессоров в дорожных контроллерах
В нашей стране осуществляется выпуск дорожных контроллеров с микропроцессорной техникой, они отличаются наличием встроенных в контроллер микроЭВМ, она выполняет функции блока управления и контроля.
Использование микропроцессоров резко расширяет технологию управления дорожным движением, появилась возможность функционирования на перекрёстке нескольких алгоритмов, с автоматическим переключением от одного к другому, в зависимости от конкретной ситуации. Это достигается за счёт смены программ обработки информации в ЗПУ и достаточного быстродействия микропроцессоров (50-100 тысяч операций в секунду).
Наличие вычислительной техники в контроллерах позволяет решить и другие задачи. То есть вывести в любой момент времени на инженерную панель контроллера данные о скорости движения, об интенсивности движения, о задержках для отдельных направлений перекрёстка. Применение в контроллерах микроЭВМ ведёт к уменьшению кол-ва передаваемой в центр информации, то есть уменьшается загрузка каналов связи с управляющим пунктом. Разгружается ЭВМ самого управляющего пункта, от решения тактических задач по управлению движением на отдельных перекрёстках.
Эксплуатация контроллеров с микропроцессором упрощается, так как изменение программы его работы не связано с перепайкой проводимой перемычки, проводов или заменой блоков.
Структурная схема контроллера ДКМП
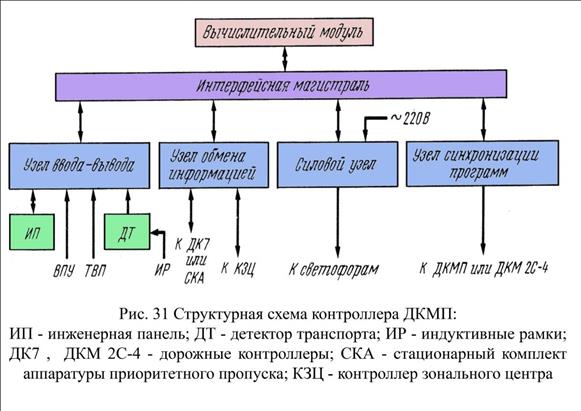
ИП - инженерная панель
ВПУ – выносной пульт управления
ТВП – табло вызова пешехода
ДТ – детектор транспорта
ИР – индукционная рамка
ДК7 – дорожный контроллер для управляемых знаков.
СКА – стационарный комплект аппаратуры.
КЗЦ – контроллер зонального центра.
Важной особенностью детекторов с микропроцессорами является осуществление операций обусловленных требованиями безопасности движения:
– осуществляется контроль перегорания ламп красного сигнала и
– одновременного горения зеленых сигналов в конфликтующих направлениях.
В этих случаях происходит отключение светофоров или перевод их в режим желтого мигания.
Лекция 14
«Характеристики дорожных контроллеров»
В нашей стране выпускались контроллеры различных типов, они отличаются по конструктивному исполнению и реализуемой ими техникой управления движением. Выделяют 3 этапа выпуска контроллеров:
1) Контроллеры 1-го поколения выпускались до 1980 года.
Особенности:
А) выполнялись на дискретных элементах.
Б) узкая специализация.
В) отсутствие возможности управления по отдельным перекрёсткам движения.
Г) ограниченное число фаз регулирования.(не более трех).
Модели 1-го поколения:
Локальные:
Упрощённые контроллеры серии УК
Пешеходные и универсальные вызывные устройства ПВУ-2М, УВУ-2М
Счётно-программное решающее устройство управления транспортом СПРУТ-1М
Системные:
БКТ-3М, БКТ-4, БКТ-5, БКТ-6, БКТ-7.
Рост интенсивности движения и усложнение схем организации движения потребности дальнейшего совершенствования технических средств управления.
2) Начиная с 1980 года в эксплуатации появились контроллеры 2-го поколения. Отличительной особенностью 2-го поколения является их построение из унифицированных блоков (агрегатный принцип). Унификация позволила сократить число блоков примерно в 10 раз. Были применены интегральные схемы, улучшилась технология управления:
А) Появилась возможность управлением движением по отдельным перекрёсткам.
Б) Увеличение числа фаз регулирования.
В) В контроллерах появилось устройство обеспечивающее безопасность движения, при выходе из строя ламп красного сигнала или включения ламп на разных направлениях.
Модели 2-го поколения.
Локальные:
ДКЛ-4, ДКМ-4.4
Системные:
ДКМ-2С.4, ДКМ-5.4, ДКМ-5.8, ДКМ-6.4.
Контроллер для управления дорожными знаками ДК-7
3)С 1985 года освоено производство контроллеров 3-го поколения с использованием микропроцессорной техники. Эти контроллеры имеют существенное отличие от контроллеров предыдущего поколения. ДКМП-1М, ДКМ-2С.4, ДКЛ-7МП.1, ДКЛ-МП.2
Переход к производству контроллеров этого типа связан:
1. С широким внедрением микропроцессоров в сферу управления технологическими процессорами в народном хозяйстве;
2. Необходимость реализации более эффективных режимов управления дорожным движением и построением разнообразных и гибких структур автоматизированных систем управления движением, приспособленных для городов с различной УДС в условиях высокой интенсивности транспортных и пешеходных потоков.
В настоящее время ведется разработка и других типов дорожных контролеров. Это позволит в дальнейшем полностью перейти на использование технических средств третьего поколения.
Дата добавления: 2017-01-29; просмотров: 1795;