Механические характеристики асинхронного двигателя в тормозных режимах
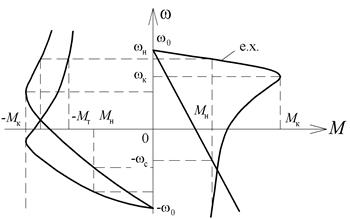
4.4.1. Режим рекуперативного торможения
Данный режим возникает при превышении частоты вращения ротора относительно синхронной частоты вращения магнитного поля статора (  ). В этих условиях электромагнитный момент двигателя становится отрицательным, а вырабатываемая энергия отдаётся в сеть. Практически этот режим можно получить уменьшив синхронную частоту вращения в работающем двигателе. Из формулы для частоты вращения ВМП (
). В этих условиях электромагнитный момент двигателя становится отрицательным, а вырабатываемая энергия отдаётся в сеть. Практически этот режим можно получить уменьшив синхронную частоту вращения в работающем двигателе. Из формулы для частоты вращения ВМП (  ) видно, что сделать это можно двумя способами: либо изменением числа пар полюсов в обмотке статора в сторону увеличения
) видно, что сделать это можно двумя способами: либо изменением числа пар полюсов в обмотке статора в сторону увеличения  , либо уменьшением частоты питающего напряжение
, либо уменьшением частоты питающего напряжение  . Этот режим применяют для уменьшения частоты вращения перед полной остановкой двигателя в лифтах, либо в тех случаях, когда двигатель работает на активный момент (например, в подъемно-транспортных машинах). Схема включения и механические характеристики двигателя в режиме рекуперативного торможения представлены на рис. 4.8, а, б соответственно.
. Этот режим применяют для уменьшения частоты вращения перед полной остановкой двигателя в лифтах, либо в тех случаях, когда двигатель работает на активный момент (например, в подъемно-транспортных машинах). Схема включения и механические характеристики двигателя в режиме рекуперативного торможения представлены на рис. 4.8, а, б соответственно.
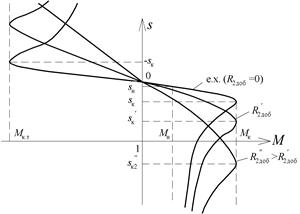
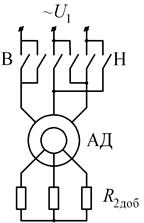
4.4.2. Режим торможения противовключением
Режим получается, когда активный статический момент больше, чем пусковой либо при изменении чередования фаз на обратное, при этом частота вращения магнитного поля изменяет направление вращения на притивоположное. Данный режим позволяет получать большие моменты, благодаря чему время торможения существенно уменьшается. Если при переключении чередования фаз двигатель включить при скорости близкой к нулю, то двигатель перейдет в двигательный режим работы другого направления вращения. При таком способе торможения в двигателе возникают большие токи, поэтому данный режим применяется для двигателей с ФР и введением дополнительного сопротивления в цепь ротора для ограничения максимального тока двигателя.

| 
|
| а | б |
| Рис. 4.8. Схема включения АД (а) и механические характеристики (б) при рекуперативном торможении | |
| 
|
| а | б |
| Рис. 4.9. Схема включения АД (а) и механические характеристики (б) при торможении противовключением |
В асинхронном двигателе с ФР момент и ток двигателя можно регулировать введением в цепь ротора дополнительного сопротивления. При этом изменяется жесткость механических характеристик в режиме торможения. При торможении вся энергия выделяется на сопротивлении ротора и дополнительном сопротивлении, поэтому этот режим является неэкономичным.
Схема включения и механические характеристики для этого режима представлены на рис. 4.9, а, б соответственно.

| 
|
| а | б |
| Рис. 4.10. Схема включения АД (а) и механические характеристики (б) при динамическом торможении |
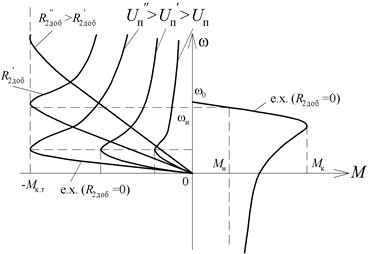
4.4.3. Динамическое торможение
Этот вид торможения наступает в трехфазном АД при отключении его от сети переменного тока и подключении его к источнику постоянного тока. При этом постоянный ток создаст неподвижное магнитное поле статора. В этих условиях в роторе, вращающемся по инерцией, наводится ЭДС, возникает ток в обмотке ротора, взаимодействие которого с магнитным полем приводит к созданию тормозного момента на валу двигателя. В процессе динамического торможения механическая энергия вращающихся масс электропривода преобразуется в электрическую энергию, которая расходуется на нагрев обмотки ротора и дополнительных резисторов, включенных в цепь ротора. При скорости близкой к нулю, ЭДС становится равной нулю, ток прекращается, и тормозной момент пропадает.
Данный режим применяют для точной остановки двигателя. Постоянный ток преодолевает лишь активное сопротивление обмотки статора, поэтому напряжение постоянного тока, подводимое к обмотке статора при динамическом торможении, должно быть ниже напряжения переменного тока, соответствующего работе двигателя, так, чтобы ток в обмотке статора не превышал номинального значения. Схема включения и механические характеристики динамического торможения показаны на рис. 4.10, а, б.
Дата добавления: 2016-12-26; просмотров: 1437;