Показатели качества регулирования угловой скорости электроприводов
Для количественного определения предъявляемых к регулируемому электроприводу требований и для сопоставления между собой возможных способов регулирования используются обобщенные показатели регулирования. К их числу относятся точность регулирования, плавность, стабильность скорости, допустимая нагрузка при различных скоростях, динамические показатели качества и экономичность регулирования.
5.2.1. Точность регулирования
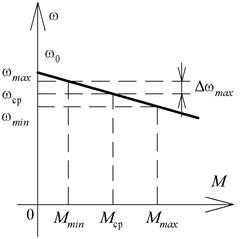
Точность регулирования переменной определяется возможными отклонениями её от заданного значения под действием возмущающих факторов (изменений нагрузки, колебания напряжения мети и др.). При регулировании в разомкнутой системе может быть принято среднее значение координаты при известных пределах изменения всех возмущающих воздействий. При этом оценкой точности регулирования может служить отношение наибольшего отклонения  к среднему значению
к среднему значению 
 ,
,
где  и
и  – максимальное и минимальное значение переменной при данных значениях параметра или задающего сигнала и пределов изменения возмущений.
– максимальное и минимальное значение переменной при данных значениях параметра или задающего сигнала и пределов изменения возмущений.
Количественная оценка точности регулирования в замкнутых системах обычно выполняется иначе. Если по условиям работы электропривода важна точность воспроизведения значений регулируемой координаты, задаваемой на входе САР, требования к точности определяются допустимой ошибкой регулирования  , абсолютное значение которой при единичной обратной связи можно записать так:
, абсолютное значение которой при единичной обратной связи можно записать так:
 ,
,
где  – задающий сигнал,
– задающий сигнал,  – текущие значения регулируемой координаты. При необходимости ошибку регулирования можно представить в относительных единицах, поделив на .
– текущие значения регулируемой координаты. При необходимости ошибку регулирования можно представить в относительных единицах, поделив на .
| 
|
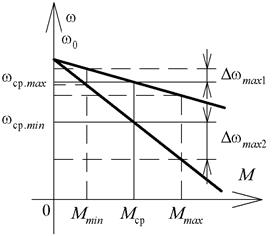
| Рис. 5.1. К определению понятия точности регулирования | Рис. 5.2. К определению понятия диапазона регулирования |
5.2.2. Диапазон регулирования
Диапазон регулирования угловой скорости определяется отношением возможных установившихся скоростей: максимальной  к минимальной
к минимальной
 .
.
При заданной точности регулирования для установленных пределов изменения момента нагрузки и других возмущений. Диапазон регулирования скорости в разомкнутых системах обычно составляет 10:1, 20:1. Использование замкнутых систем регулирования позволяет получать  до 30000:1.
до 30000:1.
Различные производственные механизмы требуют различных диапазонов регулирования. Например, главные привода металлорежущих станков в зависимости от назначения работают в с диапазонами  , для механизмов подач универсальных металлорежущих станков требуется диапазон до 10000:1. Для прокатных станов средний диапазон регулирования скорости составляет 25:1.
, для механизмов подач универсальных металлорежущих станков требуется диапазон до 10000:1. Для прокатных станов средний диапазон регулирования скорости составляет 25:1.
5.2.3. Плавность регулирования
Плавность регулирования характеризует скачок скорости при переходе от данной скорости к ближайшей возможной. Плавность тем выше, чем меньше этот скачек. Её можно оценить коэффициентом плавности регулирования, который определяется как отношение двух соседних значений угловых скоростей при регулировании
 ,
,
где  и
и  соответственно угловые скорости на i-той и (i-1) ступенях регулирования.
соответственно угловые скорости на i-той и (i-1) ступенях регулирования.
При плавном регулировании  . Плавность регулирования во многих случаях определяет качество продукции. Высокая плавность регулирования достигается сегодня при использовании полупроводниковых преобразователей для ДПТ и АД.
. Плавность регулирования во многих случаях определяет качество продукции. Высокая плавность регулирования достигается сегодня при использовании полупроводниковых преобразователей для ДПТ и АД.
5.2.4. Экономичность регулирования
Экономичность регулирования характеризуется затратами на сооружение и эксплуатацию электропривода. Применение регулируемого электропривода связано с дополнительными первоначальными затратами и эксплуатационными расходами, которые должны окупаться повышением производительности и надежности работы установки, а также улучшением качества продукции. При сравнении различных способов регулирования ориентировочное суждение о затратах можно составить, оценивая массогабаритные показатели дополнительного оборудования, а эксплуатационные затраты по энергии – КПД, характеризующим потери энергии
 ,
,
где  – мощность, потребляемая из сети;
– мощность, потребляемая из сети;  – мощность на валу двигателя
– мощность на валу двигателя
и значением  , характеризующим потребление активной мощности при регулировании.
, характеризующим потребление активной мощности при регулировании.
Для регулируемых электроприводов с вентильными преобразователями, которые вносят искажения в форму потребляемого из сети тока, важным энергетическим показателем служит коэффициент мощности:
 ,
,
где  – угол сдвига по фазе между первой гармоникой потребляемого тока и напряжением сети;
– угол сдвига по фазе между первой гармоникой потребляемого тока и напряжением сети;  – коэффициент искажений, характеризующий отношение эффективного значения первой гармоники тока к эффективному значению реальной кривой потребляемого тока, содержащей высшие гармоники.
– коэффициент искажений, характеризующий отношение эффективного значения первой гармоники тока к эффективному значению реальной кривой потребляемого тока, содержащей высшие гармоники.
Для современных регулируемых приводов наиболее характерные значения указанных показателей следующие:  . Часто для достижения наилучших значений указанных показателей применяют специальные устройства, такие как фильтры, регулирование тока возбуждения синхронной машины, оптимизация частоты переключения вентилей, использование полупроводниковых приборов с низкими потерями на переключение.
. Часто для достижения наилучших значений указанных показателей применяют специальные устройства, такие как фильтры, регулирование тока возбуждения синхронной машины, оптимизация частоты переключения вентилей, использование полупроводниковых приборов с низкими потерями на переключение.
5.2.5. Стабильность угловой скорости
Данный критерий характеризуется изменением угловой скорости при заданном отклонении момента нагрузки и тесно связан с понятием жесткости механической характеристики. Чем больше жесткость механической характеристики двигателя, тем выше стабильность скорости электропривода. Самой высокой стабильностью обладают синхронные двигатели, так как у них жесткость МХ  .
.
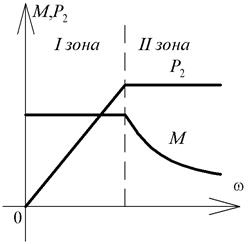
5.2.6. Направление регулирования скорости
Показатель определяет возможность уменьшение или увеличение её по отношению к номинальному значению зависит от способов регулирования. Для приводов постоянного тока различают одно- и двухзонное регулирование.
В первом случае регулирование осуществляется при постоянстве магнитного потока путем изменения напряжения на якоре вниз от номинального значения. Такое регулирование называют регулированием с постоянством момента (  ).
).
Для перевода привода во вторую зону уменьшают магнитный поток двигателя (изменяют напряжение на обмотке возбуждения ниже номинального), при этом уменьшается перегрузочная способность двигателя по моменту (  ) и увеличивается скорость. Такое регулирование называют регулированием с постоянством мощности (
) и увеличивается скорость. Такое регулирование называют регулированием с постоянством мощности (  ).
).
Характеристики двух зон регулирования ДПТ с НВ представлены на рис. 5.3.
| 
|
| Рис. 5.3. Характеристики двух зон регулирования ДПТ с НВ | Рис. 5.4. Динамические показатели качества регулирования |
5.2.6. Допустимая нагрузка двигателя
Под указанным показателем понимают наибольшее значение момента, который двигатель способен длительно развивать при работе на регулировочных характеристиках. Определяется нагревом двигателя и различается в зависимости от способа регулирования. Изменение статического момента от скорости в зависимости от механизма может быть различным. Принципиально путем выбора соответствующей мощности двигателя можно удовлетворить любому изменению нагрузочного момента или мощности при регулировании скорости. Однако часто оказывается, что регулирование является неэкономичным, и двигатель при разных скоростях может оказаться недогруженным.
Недогрузка двигателя ведет к ухудшению эксплуатационных показателей привода, так как при этом уменьшается КПД двигателя, а для АД падает также значение коэффициента мощности. Желательно поэтому применять такой способ регулирования, при котором двигатель был бы по возможности полностью загружен при всех угловых скоростях.
Допустимая нагрузка определяется степенью нагрева двигателя, которая в свою очередь зависит от потерь в двигателе и условий охлаждения двигателя. Таким образом, можно заключить, что для полной загрузки двигателя необходимо, чтобы ток двигателя во всех режимах работы был близок к номинальному. Для того чтобы условия охлаждения двигателя не ухудшались в регулируемых приводах используют двигатели с принудительной вентиляцией. Конструкция таких двигателей содержит дополнительный отдельный двигатель вентилятора, который вращается с постоянной частотой, не зависимо от частоты вращения вала двигателя.
5.2.7. Показатели качества регулирования в динамических режимах работы электропривода
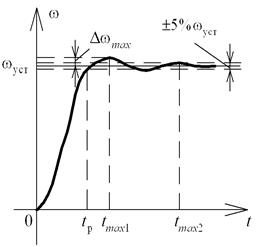
Динамические качества электропривода во многих случаях определяют производительность установки, износ механического оборудования, качество выпускаемой продукции. Поэтому качество переходных процессов имеет серьёзное значение. Качество переходного процесса можно оценить быстродействием, величиной перерегулирования и колебательностью процесса.
Быстродействие определяет быстроту реакции электропривода на изменения воздействий. Главным показателем быстродействия, непосредственно влияющим на производительность механизмов, является время переходного процесса или время регулирования. В автоматических системах регулирования быстродействие характеризуют показателями переходного процесса при отработке единичного скачкообразного управляющего воздействия. Обычно под временем регулирования понимают время, которое требуется привода для того, чтобы отклонение регулируемой координаты не превышало 5% от заданного значения.
Перерегулирование представляет собой динамическую ошибку и характеризуется максимальным отклонением от установившегося значения  . Как правило, перерегулирование
. Как правило, перерегулирование  выражают в относительных единицах или процентах:
выражают в относительных единицах или процентах:
 .
.
Колебательность электропривода является фактором, влияющим на точность, динамические нагрузки и качество технологического процесса. Её общим показателем служит значение логарифмического декремента затухания
 ,
,
где  - величина амплитуд первого и следующего за ним максимума.
- величина амплитуд первого и следующего за ним максимума.
На рис. 5.4. представлен вид переходного процесса и указаны величина быстродействия  и перерегулирование .
и перерегулирование .
Дата добавления: 2016-12-26; просмотров: 3109;