Мостові вимірювальні ланцюги.
Параметричні датчики самих різних типів мають в якості вихідної величини зміну одного з електричних параметрів : опори, індуктивності або місткості. Проблема в тому, що ці параметри мають якісь значення навіть при відсутності вхідної дії на датчик. В результаті після не-посереднього перетворення цих параметрів у більше зручну для подальшої обробки величину — напруга — отримуються ненульові його значення при нульовій дії на датчик, т. е. при нульовому значенні технологічного параметра. Звичайно, це створює незручність як для оператора, утрудняй сприйняття ним інформації про параметри технологічного процесу, так і для пристроїв подальшої обробки сигналів.
Для усунення такого зрушення напруги було б природним зрушити відповідно до нульовий рівень вхідного сигналу пристрою, на який поступає сигнал від датчика. Проведемо аналогію: для виміру висоти струменя, що б'є вгору, фонтан потрібно брати в якості нульового рівня не рівень землі, а той рівень, на якому знаходиться сопло фонтану, інакше може вийти результат в декілька метрів навіть при вимкненому фонтані. Зрушення нульового рівня означає, що треба створити напругу, рівну сигналу з датчика при нульовій дії на нього, і вже від цієї напруги відлічувати значення сигналу. Це можна зробити за допомогою мостового вимірювального ланцюга.
а б
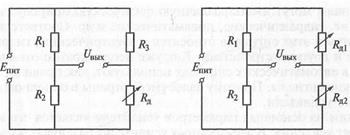
Рисунок 34 - Мостові вимірювальні кола: а — проста;б — для диференціального датчика
На мал. 34, а показаний мостове коло , утворений трьома резисторами R1, R2, R3 і вихідним опором датчика Rд. Вона живиться від джерела напруги Ежив. Опори резисторів підбираються так, що R1/R2 = R3/Rд. Отже, напруга на опорах R2 і Rд однакові і їх різниця Uвих дорівнює нулю. Ця напруга і є вихідною величиною мостового кола.
При дії на датчик з боку технологічного параметра опір датчика Rд змінюється, відповідно змінюється і напруга на ньому. Тепер воно відрізняється від напруги на R2 і різницю цих напруг (вихідний сигнал мостового кола Uвих) стає відмінною від нуля, причому вона може бути як позитивною, так і негативною.
Приведене мостовий коло є найпростішим, і його функція перетворення лінійна в дуже вузькому діапазоні. При роботі такого кола з диференціальним датчиком з вихідними опорами Rд1 і Rд2 (рис. 34, б) діапазон лінійності суттєво розширюється.
Якщо вихідна величина датчика — індуктивність або ємність, то мостове коло повинне живитися від джерела змінної напруги. В цьому випадку коло трохи ускладнюється, але принцип його роботи залишається тим же.
Підсилювачі
Підсилювачі — це пристрої, що підсилюють сигнали за рахунок зовнішнього джерела енергії.
Сигнали можуть мати різну фізичну природу: електричні, гідравлічні, пневматичні та ін. Відповідно і підсилювачі цих сигналів відносяться до електричних, гідравлічним і іншим пристроям. Як вже неодноразово відзначалося раніше, в автоматичних системах використовують, як правило, електричні сигнали. Тому далі розглянуті в основному электронні підсилювачі.
Одним з основних параметрів підсилювача є його коефіциєнт підсилення. У електронних підсилювачах розрізняють коефіцієнт підсилення по напрузі, по струму і по потужності. Коли йдеться про підсилення слабких сигналів датчиків до значень, що дозволяють виміряти величину сигналу з необхідною точністю (звичайно це рівень від частки вольта до декількох вольт), доводиться підсилювати напругу:

де Uвих — напруга на виході підсилювача;
Кu — коефіцієнт посилення напруги підсилювачем;
Uвх — напруга на вході підсилювача.
Коефіцієнт підсилення по напрузі — це відношення напруги на виході підсилювача до напруги на його вході.
Сигнали, що управляють, для виконуючих механізмів звичайно дуже слабкі для безпосередньої дії на ці механізми, і їх підсилюють по струму або по потужності до потрібних значень (до кіловат).
Коефіцієнти підсилення по струму і по потужності визначаються аналогічно коефіцієнту підсилення по напрузі:

Залежність вихідної напруги від вхідної в усьому діапазоні змін вхідної напруги називається амплітудною характеристикою підсилювача :

Амплітудна характеристика реального підсилювача показана на рис. 35. На характеристиці виділено три зони: А, В і С.
Зона А відповідає нульовому вхідному сигналу, але напруга на виході підсилювача відмінно від нуля — воно рівне так званій напрузі шумів, пов'язаній з процесами, що відбуваються усередині підсилювальних елементів (транзисторів, мікросхем), а також із зовнішніми електромагнітними наведеннями.
Від мінімальної вхідної напруги Uвх min, для якого гарантовані чіткі характеристики підсилювача, до максимальної напруги Uвх max, що задовольняє цим гарантіям, триває ділянка В, на якій амплітудна характеристика підсилювача лінійна. На ділянці С починається насичення підсилювача, коли напруга на його виході наближається до напруги джерела живлення, і він більше не може забезпечувати необхідний коефіцієнт підсилення. Штриховою лінією на рис. 5.10 показана ідеальна амплітудна характеристика. Звичайно, реальна напруга шумів значно менше, чим можна судити по рис. 35, ділянка А показана такою великою тільки для наочності.
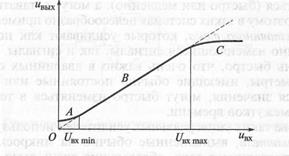
Рисунок 35 – Амплітудна характеристика підсилювача
При зміні частоти f вхідної напруги коефіцієнт підсилення підсилювача може змінюватися. Залежність Кu=F(f) називається амплітудно-частотною характеристикою (АЧХ).
На рис. 36 приведена реальна амплітудно-частотна характеристика підсилювача, по якій видно, що постійність коефіциента підсилення забезпечується тільки у визначеному діапазоні частот вхідного сигналу від fmin до fmax. На низьких і високих частотах коефіцієнт підсилення падає. Це пов'язано, в першу чергу, з наявністю в підсилювачах конденсаторів, опір яких змінному струму залежить від частоти цього струму. У сучасній електроніці поширені підсилювачі постійного струму, в яких міжкаскадні конденсатори відсутні, і коефіцієнт підсилення залишається незмінним навіть на найнижчих частотах. Штриховою лінією на рис. 5.11 показана ідеальна АЧХ.
У автоматичних системах контролю і керування сигнали, що поступають від датчиків на входи підсилювачів, прямопропорційні різним технологічним параметрам. Ці параметри можуть змінюватися (швидко або повільно), а можуть залишатися постійними. Тому в таких системах доцільне застосування підсилювачів постійного струму, які підсилюють як постійні так і силнаси, що змінюються повільно або дуже швидко, що дуже важливо в аварійних ситуаціях, коли параметри, що мають зазвичай постійні або повільно такі, що міняються значення, можуть швидко змінюватися впродовж коротких проміжків часу.

Рисунок 36 – Амплітудно-частотна характеристика підсилювача
В якості таких універсальних підсилювачів використовують операційні підсилювачі, виконані зазвичай на мікросхемах. Це підсилювачі постійного струму, що мають дуже високий коефіцієнт підсилення (до десятків тисяч) і що мають дифференційний вхід, тобто фактично два входи (прямий і інверсний), причому вихідний сигнал пропорційний різниці напруг на цих входах:

Оскільки напруга завжди передається по двохпровідній лінії, його можна підводити або до двох входів підсилювача, або до одного з входів відносно нульової точки підсилювача. Вихідний сигнал також знімається відносно цієї нульової точки. Якщо напруга подається тільки на прямий вхід, тоUвих = KuUвх1, а якщо тільки на інверсний, то Uвих = - KuUвх2
На рис. 37 показані умовне позначення операційного підсилювача на принципових схемах, його амплітудна і амплітудно-частотная характеристики. Залежно від вхідного сигнала вихідна напруга операційного підсилювача може бути як позитивною, так і негативною, що забезпечується живленням підсилювача від двох джерел напруги : +Eп і -Еп. Коли вихідна напруга наближається до цих значень, починається насичення підсилювача і його амплітудна характеристика спотворюється.
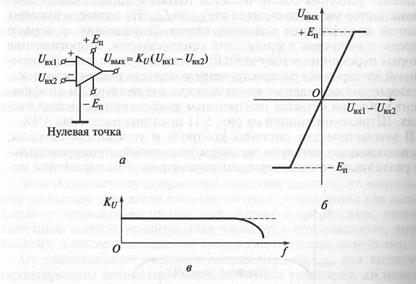
Рисунок 37 – Операційний підсилювач:
а – графічне позначення, б – амплітудна характеристика (+ Еп, -Еп – напруги живлення підсилювача); в - АЧХ
Коефіцієнт посилення операційного підсилювача можна легко регулювати, вводячи негативний зворотній зв'язок з виходу підсилювача на його інверсний вхід (рис. 38). Зміна напруги на виході завжди протилежно по знаку зміні напруги на інверсному вході, тобто ця напруга завжди в протифазі. Подаючи частину напруги з виходу на вхід, можна частково зменшити вхідний сигнал, зменшуючи тим самим коефіцієнт підсилення, тому такий зворотній зв'язок і називається негативним. Потрібний коефіцієнт встановлюється за рахунок зміни опору одного з резисторів в колі зворотнього зв'язку (зазвичай R2). Можна вважати, що коефіцієнт підсилення зі зворотнім зв'язком Кз.з рівний: Кз.з.=КU*R2/R1
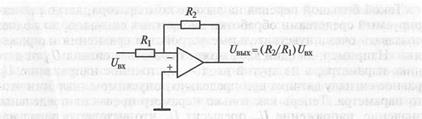
Рисунок 38 – Операційний підсилювач з від’ємним зворотнім зв’язком.
Операційні підсилювачі з великим коефіцієнтом підсилення і без зворотного зв'язку широко використовуються в автоматичних системах в якості компаратора — пристрою порівняння напруг.
Якщо на два входи такого підсилювача подати дві напруги (для обох напруги друга точка — нульова точка підсилювача), то відповідно до приведеної раніше формули напруга на виході залежатиме від різниці вхідних сигналів. Але при великому коефіцієнті посилення навіть дуже малень- різниця напруги виведе підсилювач в стан насичення, коли напруга на його виході практично стане рівною напрузі живлення. Якщо тепер одно напруга буде становити то трохи більше, то трохи менше іншого, то вихідний сигнал підсилювача мінятиметься стрибком від -Еп до +Еп, і навпаки.
Такий великий перепад на виході компаратора, легко реєструється засобами обробки дискретних сигналів, дозволяє створювати дуже чутливі пристрої порівняння напруг. Наприклад, на один вхід може подаватися сигнал Uвх від датчика параметра, а на інший вхід — постійну напругу U0, рівну сигналу датчика при гранично допустимому значенні цього параметра. Тепер як тільки параметр перевищить граничне значення, напруга Uвх перевищить U0, що викличе перепад напруги на виході компаратора, сприйманий системою як аварійний сигнал.
Оскільки при дуже великому коефіцієнті посилення Кu різниця напруги (Uвх1 - Uвх2), що призводить до спрацьовування компаратора, надзвичайно мала, можна вважати, що компаратор фіксує момент рівності напруги на його входах.
Для управління старанними механізмами в АСУ ТП використовують транзисторні підсилювачі постійного і змінного струму з невеликим коефіцієнтом посилення (100...500), але з великою вихідною потужністю (до 200 Вт).
Якщо потужність, споживана старанними механізм-мі, складає кіловати і більше, то застосовують магнітні підсилювачі. Їх робота заснована на здатності феромагнітних матеріалів в сильних магнітних полях переходити в стан насичення.
Обмотки 1 і 3 магнітні підсилювачі (мал. 39), які живляться від джерела змінної напруги створюють змінне магнітне поле, що пронизує сердечника і створює в нім магнітний потік. Згідно із законом електромагнітної індукції, чим більше цей потік, тим більше індуктивність на сердечнику обмоток і менше струм, що проходить через них. Якщо сердечник введений в стан насичення, то пронизуюче його магнітне поле вже не в змозі створити в нім великий магнітний потік. В результаті індуктивність обмоток істотно зменшується, а струм, що проходить через них, росте. Таким чином, управляючи переходом сердечника в стан насичення, можна управляти струмом в ланцюзі обмоток — вихідний величиною підсилювача.
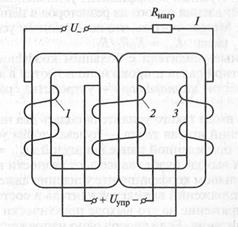
Рисунок 39 – Схема магнітного підсилювача (1...3 - обмотки)
Управляти станом насичення можна, змінюючи значення постійної напруги Uупр, що управляє, подається на обмотку підмагнічування 2. Ця напруга розглядається як вхідна величина магнітного підсилювача. При його збільшенні матеріал сердечника наближається до стану насичення, причому навіть невеликі зміни напруги, що управляє, призводять до значних змін струму I (вихідної величини) в обмотках.
Простота і велика вихідна потужність магнітних усилите-лей привели до їх широкого застосування в автоматичних системах. Основний їх недолік — велика інерційність.
Дата добавления: 2016-12-16; просмотров: 1058;