Динамические характеристики датчиков.
Виды электродвигательных исполнительных механизмов.
Электродвигательные ИМ (ЭИМ) получили наибольшее распространение в системах промышленной и сельскохозяйственной автоматики. Чаще всего в ЭИМ малой мощности (до 1000 Вт) применяются двухфазные асинхронные двигатели или двигатели постоянного тока, а в более мощных – трехфазные с короткозамкнутым или фазным ротором. Для уменьшения выбега двигателя и улучшения качества регулирования используется электрическое торможение. Конструктивно ЭИМ обычно выполняют с вращательным движением выходного вала и реже – с поступательным перемещением выходного штока.
В зависимости от типа регулирующего органа различают однооборотные, многооборотные, шаговые и постоянно вращающиеся ЭИМ. Однооборотные- с углом поворота выходного вала до 360° применяют обычно в приводе таких регулирующих органов, как заслонки, краны, шибера и т.п. Многооборотные - используют для перемещения регулирующих органов в форме запорных вентилей, дросселей и задвижек. Выходной вал у них может совершать большое число оборотов и одновременно поступательно перемещать регулирующие органы. Шаговые – применяют для преобразования импульсных сигналов управления в фиксированный угол поворота, т.е. на каждый импульс механизм делает строго заданный угловой шаг. У постоянно вращающихся - крутящий момент от вала электродвигателя к регулирующему органу передается обычно через электромагнитную муфту. Направление и скорость вращения выходного вала муфты регулируют, изменяя ток возбуждения муфты.
Основными техническими требованиями, предъявляемыми к ЭИМ, являются:
- статическая устойчивость и линейность механических характеристик во всем диапазоне изменения управления;
- линейная зависимость угловой скорости вращения ротора от величины управляющего сигнала во всем рабочем диапазоне;
- высокое быстродействие по отношению к динамическим параметрам объекта управления;
- большой пусковой момент;
- малая мощность управления при значительной механической мощности на валу электродвигателя;
- отсутствие самохода, т.е. малый остаточный вращающий момент при отсутствии сигнала управления;
- высокая надежность;
- малые габариты, размеры и масса;
- высокие эксплуатационные свойства (КПД, ресурс работы).
Динамические характеристики датчиков.
Датчик должен воспроизводить физическую величину максимально быстро и точно. Основой работы управляющего компьютера является входная информация, поэтому точные и надежные измерения — это необходимое условие качества управления. Свойства, отражающие работу датчика в условиях изменяющихся входных воздействий, называются динамическими характеристиками. Идеальный датчик мгновенно реагирует на изменение измеряемой физической величины. На практике любому датчику необходимо некоторое время на отработку нового входного сигнала.
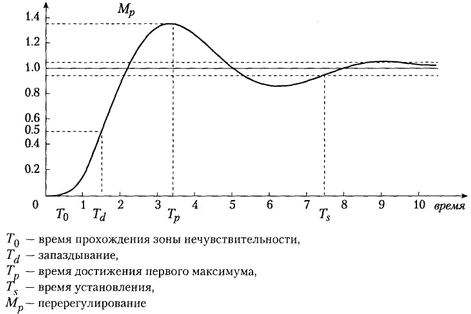
Динамическую характеристику датчика можно экспериментально получить как реакцию на скачок измеряемой входной величины. Параметры, описывающие реакцию датчика, дают представление о его скорости (например, время нарастания, запаздывание, время достижения первого максимума), инерционных свойствах (относительное перерегулирование, время установления) и точности (смещение). В принципе следует стремиться к минимизации следующих параметров.
-Время прохождения зоны нечувствительности — время между началом изменения физической величины и моментом реакции датчика, т. е. моментом начала изменения выходного сигнала.
-Запаздывание — время, через которое показания датчика первый раз достигают 50 % установившегося значения.
-Время нарастания — время, за которое выходной сигнал увеличивается от 10 до 90 % установившегося значения. Малое время нарастания всегда указывает на быструю реакцию.
-Время достижения первого максимума — время достижения первого максимума выходного сигнала (перерегулирования).
-Время переходного процесса, время установления — время, начиная с которого отклонение выхода датчика от установившегося значения становится меньше заданной величины (например, + 5 %).
-Относительное перерегулирование — разность между максимальным и установившимся значениями, отнесенная к установившемуся значению (в процентах).
-Статическая ошибка — отклонение выходной величины датчика от истинного значения или смещение. Может быть устранена калибровкой датчика.
В реальных условиях некоторые требования к датчикам всегда противоречат друг другу, поэтому все параметры нельзя минимизировать одновременно.
3. Практическая задача: Рассчитать основные характеристики апериодического звена второго порядка, такие как: передаточная функция, комплексная частотная характеристика (КЧХ), амплитудно-частотная характеристика (АЧХ) и фазо-частотная характеристика (ФЧХ). Привести примеры данного типа элементарного динамического звена.
Передаточная функция:
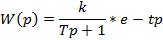
,где k - коэффициент усиления звена;T — постоянная времени, характеризующая инерционность звена. Чем больше постоянная времени звена, тем дольше длится переходный процесс.
Переходная характеристика:
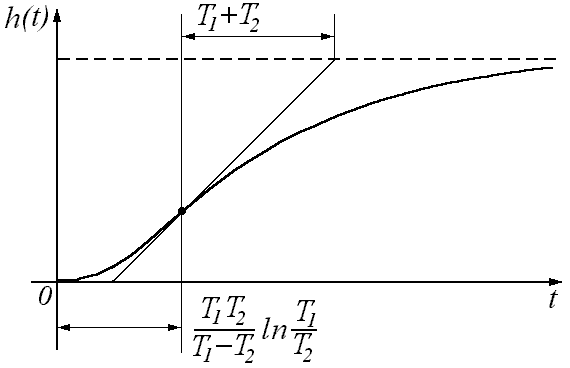
При >1 колебательное звено называется апериодическим звеном второго порядка (последовательное соединение двух апериодических звеньев с постоянными времени Т1 и Т2).
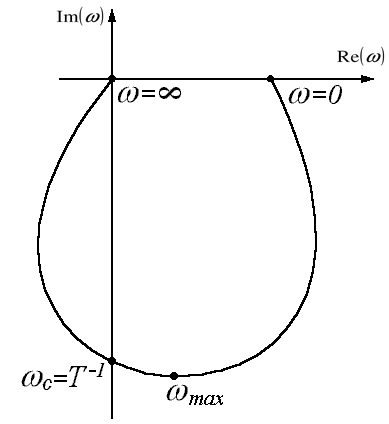
КЧХ:

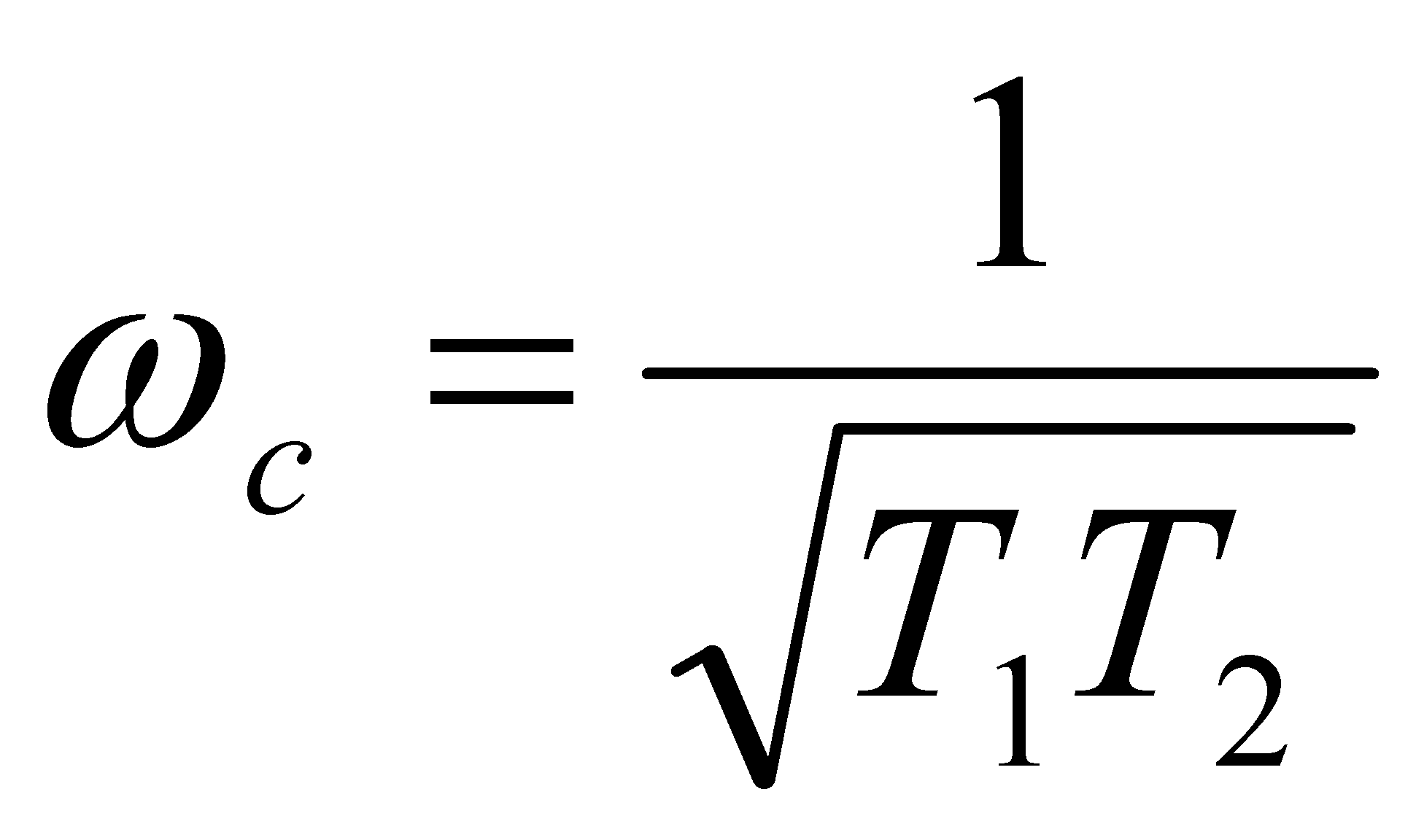
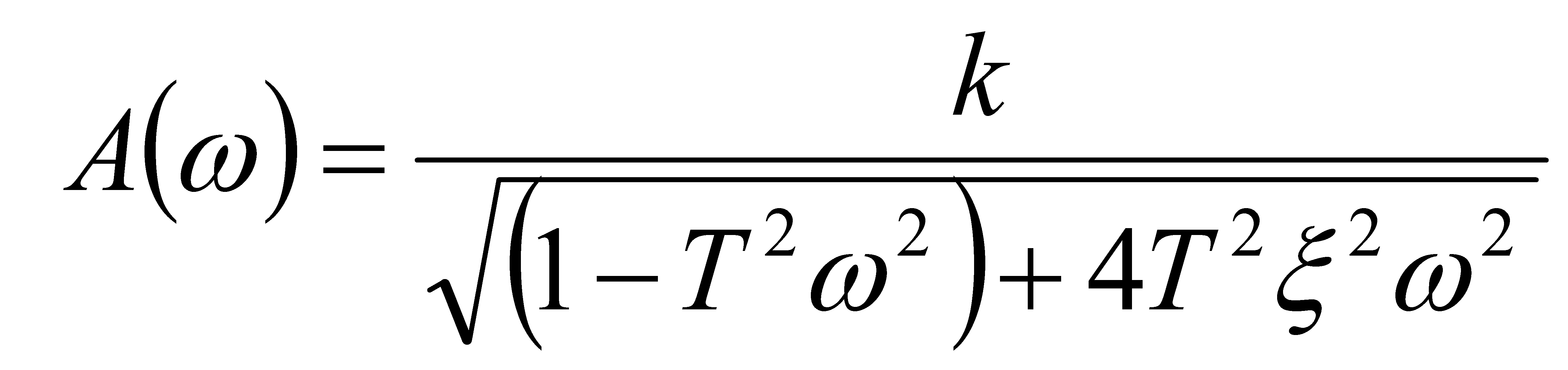
АЧХ:
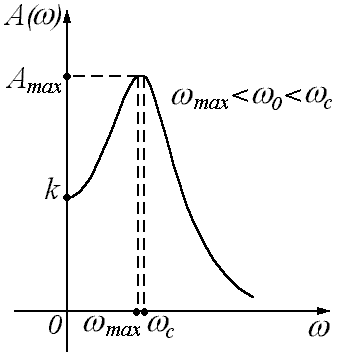
АЧХ при частоте 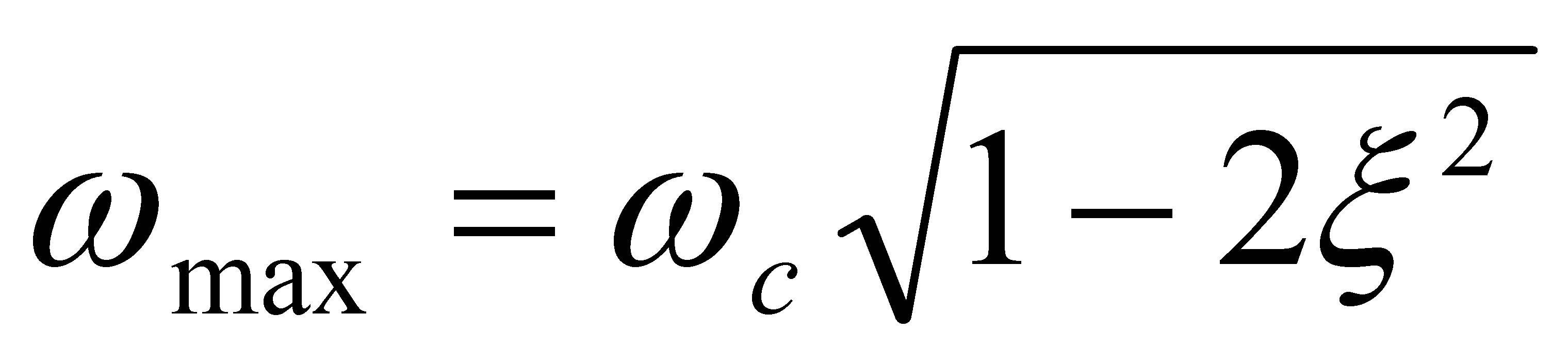 имеет максимум (резонансный пик), равный
имеет максимум (резонансный пик), равный
 .
.
Отсюда видно, что, чем меньше коэффициент , тем больше резонансный пик.
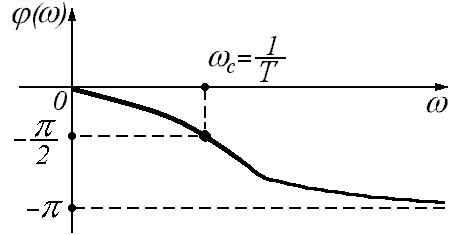
ФЧХ:
Пример использования апериодического звена второго порядка:
RC-цепь с двумя емкостями.
Двигатель постоянного тока с независимым возбуждением.
| <== предыдущая лекция | | | следующая лекция ==> |
| Погрешность и точностьдатчиков. | | |
Дата добавления: 2016-05-11; просмотров: 2349;