МЕХАНИЗАЦИЯ КРЫЛА. ВЛИЯНИЕ МЕХАНИЗАЦИИ НА АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ КРЫЛА, РАБОТА РУЛЕЙ

| 
|
Рис. 20.
Предкрылок служит в основном для увеличения максимальных эксплуатационных углов атаки, а также выдвижные предкрылки увеличивают кривизну и толщину профиля при выпуске, что тоже увеличивает несущую способность крыла. Предкрылок как бы принудительно направляет верхний обтекающий поток ближе к поверхности, чем отодвигает aкр до более высоких значений.
Закрылок изменяет кривизну и толщину профиля если это поворотный закрылок или посадочный щиток и увеличивает подъёмную силу, но вместе с тем резко увеличивает лобовое сопротивление, что требует увеличения тяги или увеличения угла планирования. Такие закрылки весьма полезны для уменьшения посадочной скорости, однако из-за большого лобового сопротивления их проблематично применять при взлёте для уменьшения скорости отрыва и сокращения взлётной дистанции.

| 
|
Рис. 22.
Выдвижные закрылки увеличивают кривизну профиля, толщину и площадь крыла, тем самым снижая удельную нагрузку на крыло. Удельной нагрузкой на крыло называется вес ЛА на единицу площади крыла. Измеряется в кг/м2. Чем меньше нагрузка на крыло, тем на меньшей скорости может летать ЛА. Поэтому большее распространение получили выдвижные закрылки. Они увеличивают одновременно и Cy за счёт изменения кривизны и толщины, и площадь крыла, снижая скорость ЛА, как бы адаптируя, подстраивая крыло самолёта к полёту на меньшей скорости.
Рис. 23.
Иногда используется дополнительный (промежуточный) маленький закрылок, называемый дефлектором.
Работа рулей аналогична работе поворотного закрылка с той лишь разницей, что отклоняясь в противоположную сторону, изменяется на противоположную и сила, создаваемая крылом, килём или стабилизатором.
Интерцепторы устанавливают на крыльях. Принцип работы схож с принципом работы посадочного щитка. при дифференциальном подъёме на крыльях они могут работать совместно с элеронами или вместо них. На посадке их применяют для резкого снижения подъёмной силы после касания самолётом земли, чтобы исключить подскакивание самолёта.
Рис. 24.
Триммер — это маленькая аэродинамическая поверхность на задней кромке руля, которая способна отклоняться. Триммер управляется из кабины и служит для снятия постоянных усилий с органов управления.
рис. 25
Небольшие усилия всегда присутствуют на ручке управления, они необходимы пилоту для ощущения рулей и являются результатом воздействия обтекающего потока на рули. Однако на разных режимах полёта среднее положение рулей различно, и для снятия постоянных значительных усилий служит триммер.
15. СИЛЫ, ДЕЙСТВУЮЩИЕ НА КРЫЛО НА РАЗЛИЧНЫХ РЕЖИМАХ ПОЛЁТА
Рис 26. Силы, действующие в горизонтальном полёте самолета

| В горизонтальном полёте на крыло воздействуют 3 силы. R — полная аэродинамическая сила, которая раскладывается на 3 составляющие: Y — подъёмная сила; X — сила сопротивления; Z — боковая сила. G — сила веса; P — сила тяги. при этом P=X есть условие сохранения скорости Y=G есть условия сохранения горизонтального полета, |
P=X+ Gsinq — условие постоянной скорости;
Gcosq=Y — условие постоянного q.
рис.27. Схема сил, действующих в наборе высоты
В наборе высоты сила G раскладывается в скоростной системе координат на две составляющие Gcosq(q — тета — угол наклона траектории) и Gsinq. Gcosq уравновешивается подъёмной силой Y, а Gsinq суммируется с силой X и образует суммарную силу, которая уравновешивается силой тяги.
Силы, возникающие при наборе высоты планером при старте с лебёдки, мы рассмотрим далее в специальной статье.
X= Gsinq — условие постоянной скорости;
Gcosq=Y — условие постоянного q.
рис.28. Схема сил, действующих на планировании
На планировании сила G раскладывается также на 2 составляющие Gcosq(q — тета — угол наклона траектории) и Gsinq. Gcosq уравновешивается подъемной силой Y, а Gsinq суммируется с силой X.
То есть на планировании роль силы тяги выполняет составляющая силы веса.
16. КРИВЫЕ ЖУКОВСКОГО. ПОНЯТИЕ О 1-ОМ и 2-ОМ РЕЖИМАХ ПОЛЁТА.
рис.29. Кривые Жуковского
| Кривыми Жуковского называется график, на котором изображены в одной системе координат две кривые. На вертикальной оси откладывается тяга, на горизонтальной — скорость полёта. Эти кривые обычно рассматривают применительно к горизонтальному полету. Нижняя кривая отражает потребную тягу для горизонтального полета относительно скорости полёта. |
Как видно на графике, минимальная тяга нужна на наивыгоднейшей скорости Vнв.
Верхняя кривая отражает максимальную тягу силовой установки в зависимости от скорости полета. Точка пересечения двух кривых является точкой максимальной скорости горизонтального полёта.
При снижении тяги двигателя верхняя кривая опускается вниз, и мы видим уже 2 точки пересечения кривых, которые соответствуют двум скоростям, которые располагаются по разные стороны от точки Vнв. То есть ЛА может лететь с заданной тягой на некоторой V большей Vнв и на некоторой V меньшей Vнв.
Рис. 30.
При некотором снижении скорости полета от V1 на DV1 возникает остаток тяги DP1, который стремится вернуть самолёт в исходный режим, т.е. разогнать до скорости V1. При таком же снижении скорости на DV2 от скорости V2 наблюдается недостаток тяги DP2 — и самолёт ещё больше теряет скорость, т.е. тормозится, и для восстановления исходного режима полёта требуется немедленное увеличение тяги для того, чтобы превысить DP2 — фактически, как говорят пилоты, самолёт висит на тяге. Полёт на V менее Vнв требует повышенного внимания к скорости и постоянного импульсного управления тягой.
Полёт на V более Vнв называется полётом на 1-ом режиме, а полёт на V менее Vнв — полётом на 2-ом режиме. Границей 1-го и 2-го режима полёта является Vнв.
Полёт на 2-ом режиме сопряжён с повышенной опасностью, так как происходит вблизи V срыва и может выполняться только на самолёте с большим запасом тяги и с высокой приёмистостью двигателя. Техника выполнения требует специальной тренировки. На лёгких и самодельных ЛА не рекомендуется выполнять полёт на 2-ом режиме. Второй режим используется как проходной лишь на посадке от момента выравнивания и до касания.
На планере полёт на 2-ом режиме не используется, поскольку это уже будет не полёт, а беспорядочное снижение по ступенчатой траектории.
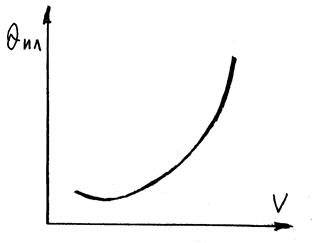
Кривые Жуковского применительно к планеру имеют вид одной кривой, которую можно изобразить как кривую углов планирования.
Рис. 31
Дата добавления: 2016-09-20; просмотров: 2206;