Программирование Ремиконта Р-130
Язык программирования Ремиконта Р-130 является непроцедурным. При программировании не задается порядок выполнения операций, а создается виртуальная (кажущаяся) структура, которая описывает информационную организацию контроллера и характеризует его как звено системы управления.
Часть элементов виртуальной структуры реализована аппаратно: аппаратура ввода-вывода информации, аппаратура оперативного управления и настройки, аппаратура интерфейсного канала. Часть реализовано программно в виде алгоритмических блоков (алгоблоков) и библиотеки алгоритмов.
Алгоблок служит для хранения одного из библиотечных алгоритмов контроллера. Алгоблок с помещенным в него алгоритмом может рассматриваться как виртуальный прибор, выполняющий алгоритмическую обработку информации в соответствии с помещенным в него алгоритмом. Он обладает входами и выходами в количестве, присущем данному алгоритму. Алгоблоки соединяются друг с другом и с входами-выходами контроллера программным путем. В Ремиконте Р-130 можно использовать
до 99 алгоблоков.
Библиотека алгоритмов – это перечень алгоритмов управления, которые могут помещаться в алгоб локи. Библиотека насчитывает 76 алгоритмов. В ее состав входят алгоритмы автоматического регулирования, динамических преобразований, логики, арифметических операций.
Часть библиотечных алгоритмов, которые называются специальными, выполняют особую задачу: они связывают аппаратуру контроллера с основной массой функциональных алгоритмов. К специальным алгоритмам относятся: алгоритмы ввода и вывода аналоговых и дискретных сигналов; алгоритмы обслуживания лицевой панели; алгоритмы приема и передачи сигналов через интерфейсный канал.
Аппаратные средства виртуальной структуры (УСО, лицевая панель, интерфейсный канал) начинают выполнять свои функции после того, как в какие-либо алгоблоки будут помещены соответствующие алгоритмы.
В качестве примера библиотечного алгоритма на рис. 7.8 представлена функциональная схема алго ритма «Регулирование аналоговое РАН».
Функциональная схема алгоритма содержит несколько звеньев. Звено, выделяющее сигнал рассо гласования, суммирует два входных сигнала, при этом один из сигналов масштабируется, фильтруется и инвертируется. Сигнал рассогласования ε на выходе звена (без учета фильтра) равен
ε = x1 − kм x2 ,
где kм – масштабный коэффициент.
Рис. 7.8. Функциональная схема алгоритма
«Регулирование аналоговое РАН»
Фильтр имеет передаточную функцию
( W( p) = 1 Tф p +1),
где Tф – постоянная времени фильтра.
Зона нечувствительности не пропускает на свой выход сигналы, значения которых находятся в пределах от – xΔ / 2 до xΔ / 2 .
ПИД-звено выполняет преобразование в соответствии с передаточной функцией
где Kп , Tи , Kд – соответственно коэффициент пропорциональности, постоянная времени интегрирования и коэффициент времени дифференцирования.
На выходе ПИД-звена устанавливается ограничитель, который ограничивает выходной сигнал ал горитма по максимуму xмкс и минимуму xмин . Момент достижения выходным сигналом ПИД-звена зна чений xмкс и xмин фиксируют два дискретных выхода Dмкс и Dмин .
Алгоритм содержит узел настройки, состоящий из переключателя режимов «настройка-работа», нуль-органа и дополнительного фильтра с постоянной времени Tф1 . При дискретном сигнале на входе cнас = 1 алгоритм переходит в режим настройки, и в замкнутом контуре регулирования устанавливаются автоколебания. Параметры этих колебаний (амплитуда и период), которые контролируются на выходе yε , используются для определения параметров настройки регулятора.
Общие правила программирования. В исходном состоянии в алгоблоках отсутствуют алгоритмы управления, и алгоблоки не связаны друг с другом и аппаратной частью виртуальной структуры. При программировании контроллера алгоритмы помещаются в алгоблоки и между алгоблоками программно устанавливаются связи.
При размещении алгоритмов в алгоблоках в большинстве случаев действуют два правила:
1. Любой алгоритм можно помещать в любой (по номеру) алгоблок, за исключением алгоритмов, обслуживающих лицевую панель. Эти алгоритмы могут быть помещены в первые четыре алгоблока (номер алгоблока определяет номер контура регулирования).
2. Один и тот же алгоритм можно помещать в разные алгоблоки, т.е. использовать многократно.
При размещении необходимо задать реквизиты (параметры) алгоритма: библиотечный номер, модификатор и масштаб времени.
Библиотечный номер представляет собой двухзначное число, под которым данный алгоритм хра нится в библиотеке, и является основным параметром, характеризующим свойства алгоритма.
Модификатор задает дополнительные свойства алгоритма. В частности в алгоритме суммирования модификатор задает число суммируемых входных сигналов, в алгоритме программного задатчика – количество участков и т.д.
Масштаб времени имеется только в алгоритмах, чья работа связана с реальным временем, например, регулирование, программный задатчик, таймер и т.д. Масштаб времени задает одну из двух размерностей для временных сигналов или параметров. Если контроллер настроен на младший диапазон, то масштаб времени индивидуально в каждом алгоблоке задает масштаб «секунды» или «минуты». Для
старшего диапазона масштаб времени задает «минуты» или «часы».
Соединение алгоблоков между собой и с аппаратной частью контроллера осуществляется операцией конфигурирования. В процессе конфигурирования для каждого входа алгоблока задается источник сигнала или параметры настройки, т.е. каждый вход алгоблока находится в одном из двух состояний – связанном или свободном.
Вход считается связанным, если он соединен с выходом какого-либо алгоблока, в противном случае вход считается свободным.
Сигналы на свободных входах могут быть представлены в виде констант или в виде коэффициентов. Отличие между ними заключается в возможности их изменения: константы можно устанавливать и изменять только в режиме программирования, коэффициенты можно также устанавливать и изменять и в режиме работы.
Возможности конфигурирования не зависят от алгоритма, помещенного в алгоблок, и определяются тремя правилами:
1. Любой вход любого алгоблока можно связать с любым выходом любого алгоблока или оставить
свободным.
2. На любом свободном входе любого алгоблока можно вручную задавать сигнал в виде константы
или коэффициента.
3. На любом входе любого алгоблока сигнал можно инвертировать.
Исключениями из этих правил являются неявные входы и выходы тех алгоритмов, которые связывают аппаратуру контроллера с основной массой функциональных алгоритмов.
В целях упрощения процесса программирования из библиотеки контроллера можно переписать в ОЗУ уже готовые, так называемые стандартные конфигурации аналогового (рис. 7.9) и импульсного регуляторов. При этом процесс программирования сводится к вызову стандартной конфигурации, к установке заданных параметров настройки алгоритмов (коэффициентов и констант на свободных входах алгоблоков), а также к изменению или дополнению (если требуется) этой стандартной конфигурации с помощью обычных процедур программирования.
На рис. 7.9 показана структурная схема стандартной конфигурации «Регулятор аналоговый РЕГА», предназначенной для построения контура регулирования с аналоговым выходным сигналом (свободные входы алгоблоков на рисунке не показаны).
«Регулятор аналоговый РЕГА» содержит шесть алгоритмов.
ОКО – алгоритм оперативного контроля контуров – применяется для связи лицевой панели контроллера с алгоритмами ЗДН, РУЧ, РАН и др. Алгоритм позволяет контролировать сигналы задания и рассогласования, входной и выходной сигналы, параметры программного задания (при программном регулировании) и т.п.
ВАА и АВА – соответственно, ввод аналоговый группы А и аналоговый вывод группы А – применяются для связи функциональных алгоритмов с аппаратными средствами аналогового ввода (АЦП группы А) и вывода (ЦАП группы А).
ЗДН – алгоритм «задание» – применяется для изменения режима задания и формирования сигнала ручного задания в контуре регулирования.
Рис. 7.9. Стандартная конфигурация 01 «Регулятор________аналоговый РЕГА»
РАН – алгоритм ПИД-регулирования.
РУЧ – алгоритм «ручное управление» – используется для изменения режима управления (ручное – автоматическое) и изменения выходного сигнала регулятора в ручном режиме.
Процедуры технологического программирования и настройки.
В режиме программирования задаются все программируемые параметры контроллера, определяющие его алгоритмическую структуру, т.е. действия, которые будет совершать контроллер как звено системы управления. Эти параметры в общем случае задаются трехступенчатым методом: вначале выбирается та или иная процедура программирования, в ней выбирается нужная операция, и в пределах этой операции устанавливаются требуемые параметры.
В контроллере имеются восемь процедур программирования:
1. Тестирование («Тест»).
2. Приборные параметры («Приб»).
3. Системные параметры («Сист»).
4. Алгоритмы («Алг»).
5. Конфигурация («Конф»).
6. Параметры настройки («Настр»).
7. Начальные условия («Н.усл.»).
8. Работа с ППЗУ («ППЗУ»).
В процедуре «Тест» можно осуществить проверку ОЗУ, ПЗУ, ППЗУ, интерфейсного канала, сторожа цикла, пульта настройки и лицевой панели, средств вывода информации.
В процедуре «Приб» задаются и контролируются параметры, характеризующие контроллер в целом. Здесь производится очистка ОЗУ и установка стандартной конфигурации, задание модификации контроллера, установка времени цикла (времени опроса входов и выдачи управляющих сигналов) и др.
В процедуре «Сист» устанавливается режим интерфейса.
В процедуре «Алг» производят заполнение алгоблоков алгоритмами и устанавливают требуемые модификаторы и масштабы времени алгоритмов.
В процедуре «Конф» определяют состояние каждого входа алгоблоков: связанное или свободное.
Для связанных входов задают номер алгоблока – источника и номер его выхода, с которым соединяется данный вход. На свободном входе определяется вид параметра настройки: константа или коэффициент.
В процедуре «Настр» устанавливаются значения параметров настройки – как констант, так и коэффициентов. Эта процедура выполняется лишь для тех входов алгоблоков, которые в процедуре конфигурирования были определены как свободные.
В процедуре «Н.усл.» устанавливаются значения сигналов на выходах алгоблоков, с которыми алгоблоки начнут работать при переходе в режим «работа».
В процедуре «ППЗУ» выполняются операции записи, восстановления, регенерации информации в ОЗУ, ПЗУ, ППЗУ.
Микроконтроллер «Ремиконт Р-130» изготавливается ОАО «Завод Электроники и Механики», г. Чебоксары, www.zeim.ru.
Кроме базовой модели «Ремиконта Р-130» этим предприятием изготавливаются «Ремиконт Р130М», «Ремиконт Р-130ТМ», «Ремиконт Р-130ISа».
Контроллер Р-130М является модернизацией базового контроллера «Ремиконт Р-130» и имеет расширенные функциональные возможности. В контроллере Р-130М сохранены все функциональные возможности Р-130 (включая поддержку библиотеки алгоритмов) и габаритно-присоединительные размеры. Контроллер имеет физические интерфейсы ИРПС, RS232, RS485 и осуществляет поддержку протоколов «Транзит», Modbus, Ethernet TCP/IP.
В контроллере Р-130М по сравнению с базовой моделью Р-130 увеличено число независимых контуров регулирования и число независимых логических программ шагового управления до 8 (в Р-130 их 4), появилась возможность создания библиотек собственных алгоритмов.
Контроллер Р-130ТМ – исполнение контроллера Р-130 со встроенным микромонитором реального времени и ОЕМ-версии интегрированной SCADA/HMI системы Trace Mode.
Перспективной возможностью является и исполняющая система языка FBD стандарта IEC
61131-3. Международные стандарты содержат пять языков технологического программирования. Однако контроллер Р-130 имеет язык программирования, не соответствующий этим стандартам. В перспективе планируется адаптировать контроллер к одному из стандартных языков технологического программирования.
Следует отметить, что новый технологический язык вводится в модернизированный вариант контроллера путем подключения новой, динамически подключаемой библиотеки, что позволяет без существенных проблем выполнять на одном контроллере задачи, использующие различные библиотеки. Одной из подключаемых библиотек станет библиотека нечеткой логики, которая все шире используется в задачах управления технологическими процессами.
Предусматривается возможность создания библиотек собственных алгоритмов с программированием на языке С/С++.
Работа над расширением возможностей контроллера будет проводиться последовательно и внедряться после тщательного тестирования. Обновление программного обеспечения станет осуществляться путем
УСИЛИТЕЛИ МОЩНОСТИ
Выходные порты управляющих контроллеров имеют очень низкую мощность и не могут непосредственно управлять каким-либо физическим устройством. Для того чтобы возбуждать исполнительные механизмы, взаимодействующие с физическим процессом (двигатели и т. п.), выходной сигнал компьютера необходимо усиливать. Усилители мощности управляющих сигналов могут быть выполнены как отдельные устройства, так и входить непосредственно в состав исполнительного механизма. При уровнях мощности до нескольких сотен ватт можно использовать усилители, аналогичные применяемым в аудиосистемах. При больших мощностях чаще используется название сервоусилитель. Конструктивно последние обычно выполнены таким образом, чтобы их можно было монтировать вместе с двигателями или электроклапанами.
Усилители с ШИМ
С целью уменьшения мощности, выделяющейся на выходном каскаде устройства регулирования, часто применяют регуляторы, выходной сигнал которых представляет собой импульсы с переменной длительностью и переменным периодом.
Как правило, объект в этом случае по отношению к импульсному сигналу выполняет функцию ФНЧ и поэтому осуществляется квазинепрерывное регулирование.
Широтно-импульсная модуляция (ШИМ, pulse-width modulation - PWM). В этом случае выходное напряжение переключается между двумя постоянными значениями с высокой частотой, обычно в диапазоне нескольких килогерц. Средний уровень напряжения поддерживается изменением (модуляцией) ширины импульсов. На Рис 8.1 приведен пример такого сигнала. "Узкие" импульсы соответствуют низкому а «широкие» - высокому среднему напряжению. Устройство ШИМ включено в схему управления мощностью на основе твердотельных выключателей типа транзисторов, мощных полевых МОП-транзисторов или тиристоров. В преобразователях для мощностей порядка 300 кВт используются так называемые биполярные транзисторы с изолированным затвором (Insulated Gate Bipolar Transistors - IGBT). Для больших уровней мощности целесообразно применять запираемые тиристоры(Gate Turn Off thyristors - GT0 thyristors).
Технология ШИМ используется в тех случаях, когда обычный усилитель просто сгорит из-за высокого уровня мощности. Переключения приводят к тому, что твердотельные приборы загружены полной мощностью лишь короткое время и, соответственно рассеивание мощности в них мало, а значит, ШИМ-усилители имеют высокую эффективность. Дополнительным преимуществом ШИМ-усилителей является возможность непосредственного управления переключениями через цифровой выходной порт компьютера.
ШИМ-управление широко используется в технике исполнительных механизмов непрерывного действия- таких как двигатели переменного и постоянного тока и гидропривод. Если частота переключений ШИМ-усилителя достаточно высока по сравнению с постоянной времени исполнительного механизма, то результирующий сигнал имеет некое среднее значение (рис. 8.1). Входное напряжение переключатся между нулевым и максимальным значениями, в результате вырабатывается определенное среднее значение выходной мощности. Если частота переключения достаточно высока по сравнению с постоянной времени управляемой системы, то колебания выходных величин пренебрежимо малы.
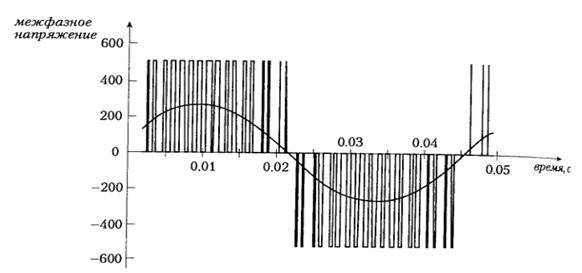
Рис. 8.1. Огибающая результирующего напряжения в цикле широтно-импульсной модуляции (ШИМ)
Напряжение переключается между тремя значениями (ноль, положительный максимум и отрицательный минимум). Синусоидальная кривая — эффективное напряжение, приложенное к нагрузке
Частотный преобразователь (frequency converter) - это регулятор частоты вращения и момента двигателя, основанный на применении ШИМ-технологии: он применяется для двигателей переменного тока. Частотные преобразователи можно пользовать как в новых системах, так и для модификации старых. Поскольку большинство насосов и компрессоров уже имеют асинхронные двигатели, то в некотором смысле они подготовлены к применению частотных преобразователей. При реализации сложных режимов с широким рабочим диапазоном, при низких скоростях и больших моментах может потребоваться дополнительное охлаждение по сровнению с обычно применяемым в двигателях.

 Здесь приняты следующие обозначения:
Здесь приняты следующие обозначения:
Рег – регулятор с непрерывным управляющим воздействием (П, ПИ, ПИД-регуляторы);
ШИМ – широтно-импульсная модуляция;
ИМ – исполнительный механизм.
 Рассмотрим схему ШИМ на ОУ:
Рассмотрим схему ШИМ на ОУ:
 Диаграммы работы:
Диаграммы работы:
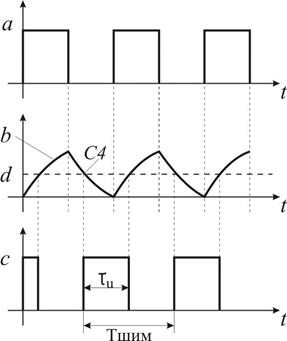
Функциональный состав:
генератор прямоугольных импульсов.
Выполнен на элементах: R1, C1, R2, R3, DA1/
формирователь пилообразного напряжения:
C2, R7, C4, DA2.
компаратор:
R4, R5, C3, DA3.
выходной усилительный каскад:
R6, VD1, VT1.
Транзистор работает в ключевом режиме. Непрерывный регулятор формирует сигнал управления, который поступает на положительный вход компаратора. Одновременно на инвертирующий вход компаратора поступает пилообразное напряжение, сформированное генератором (1) и формирователем (2). Результат сравнения этих двух сигналов поступает на выходной усилитель (4).
Скважность вычисляется по формуле:

Где τИ – длительность импульса, а TИМП – период ШИМ.
Дата добавления: 2016-05-05; просмотров: 4599;