Расчеты при проектировании оборудования и оснастки
Проектируемые стенды содержат движущиеся при работе детали, нагруженные силами и моментами, а проектируемые приспособления – неподвижные нагруженные детали.
В техническом задании на проектирование указывают сведения, которым должен удовлетворять разработанный объект, в т.ч. параметры исполнительного звена – ведомого элемента (силу, момент, скорость, угловую частоту вращения и др.). По этим данным разрабатывают кинематическую схему, подбирают двигатель и передаточные устройства. Проектирование изделия сопровождается расчетом деталей.
Выбор привода. Привод включает электродвигатель и редуктор. Мощность привода Pвых на выходе равна
 , (3.12)
, (3.12)
где Ft – окружная сила, Н; v – окружная скорость, м/с; Mt – крутящий момент, Нм; ω – угловая частота вращения, с–1.
Требуемая мощность электродвигателя Рэ.тр равна
 , (3.13)
, (3.13)
где ηобщ = η1·η2·η3·… – общий КПД привода. Здесь η1, η2, η3, … – КПД отдельных звеньев кинематической цепи.
Ориентировочные значения КПД звеньев кинематической цепи с учетом потерь в подшипниках приведены в таблице 3.6.
Таблица 3.6
Рекомендуемые значения КПД
| Тип передачи, элемент кинематической цепи | η | |
| Зубчатая | цилиндрическая | 0,96–0,98 |
| коническая | 0,95–0,97 | |
| Планетарная | одноступенчатая | 0,95–0,97 |
| двухступенчатая | 0,92–0,96 | |
| Червячная при передаточном числе | более 30 | 0,70–0,80 |
| более 14 до 30 | 0,75–0,85 | |
| более 8 до 14 | 0,80–0,90 | |
| Ременная (все типы) | 0,94–0,96 | |
| Цепная | 0,92–0,95 | |
| Муфта соединительная | 0,98 | |
| Подшипники качения (одна пара) | 0,99 |
По таблице 3.7 подбирается ближайшая к требуемой мощности электродвигателя Рэ.тр стандартная мощность электродвигателя Рэ. Допускается перегрузка асинхронных электродвигателей до 8 %.
Таблица 3.7
Технические данные двигателей серии АИР
(числитель – тип, знаменатель – асинхронная частота вращения, мин–1)
| Мощность P, кВт | Синхронная частота, мин–1 | |||
| 0,37 | – | – | 71A6/915 | – |
| 0,55 | – | 71A4/1357 | 71B6/915 | – |
| 0,75 | 71A2/2820 | 71B4/1350 | 80A6/920 | 90LA8/705 |
| 1,1 | 71B2/2805 | 80A4/1395 | 80B6/920 | 90LB8/715 |
| 1,5 | 80A2/2850 | 80B4/1395 | 90L6/925 | 100L8/702 |
| 2,2 | 80B2/2850 | 90L4/1395 | 100L6/945 | 112MA8/709 |
| 80L2/2850 | 100S4/1410 | 112MA6/950 | 112MB8/709 | |
| 100S2/2850 | 100L4/1410 | 112MB6/950 | 132S8/716 | |
| 5,5 | 100L2/2850 | 112M4/1432 | 132S6/960 | 132M8/712 |
| 7,5 | 112M2/2895 | 132S4/1440 | 132M6/960 | 160S8/727*3) |
| 132M2/2910 | 132M4/1447 | 160S6/970*4) | 160M8/727*3) | |
| 160S2/2910*1) | 160S4/1455*2) | 160M6/970*5) | 180M8/731 | |
| 18,5 | 160M2/2910*1) | 160M4/1455*2) | 180M6/980*3) | – |
| 180S2/2919*1) | 180S4/1462*3) | – | – | |
| 180M2/2925*1) | 180M4/1470*1) | – | – | |
| Примечания: *1) Tmax/T = 2,7; *2) Tmax/T = 2,9; *3) Tmax/T = 2,4; *4) Tmax/T = 2,5; *5) Tmax/T = 2,6; для остальных случаев Tmax/T = 2,2. |
Асинхронная угловая частота вращения вала электродвигателя nэ определяется по формуле
 мин–1, (3.14)
мин–1, (3.14)
где nвых – угловая частота вращения выходного вала привода, мин–1; u1, u2, u3, … – передаточные числа кинематических пар привода.
Общее передаточное число привода uобщ определяется по формуле
 (3.15)
(3.15)
Рекомендуемые значения передаточных чисел u1, u2, u3, … приведены в таблице 3.8.
Таблица 3.8
Рекомендуемые значения передаточных чисел передач
| Вид передачи | Твердость зубьев | Передаточное число u |
| Зубчатая цилиндрическая: | ||
| – тихоходная ступень | ≤350 HB 40–56 HRC 56–63 HRC | 2,5–5,6 2,5–5,6 2–4 |
| – быстроходная ступень в редукторах по развернутой схеме | ≤350 HB 40–56 HRC 56–63 HRC | 3,2–5,6 3,2–5,0 2,5–4,0 |
| – быстроходная ступень в соосном редукторе | ≤350 HB 40–56 HRC 56–63 HRC | 4,0–6,3 4,0–6,3 3,2–5,0 |
| Коробка передач | Любая | 1–2,5 |
| Коническая зубчатая | Любая | 1–4 |
| Червячная | – | 16–50 |
| Цепная | – | 1,5–3 |
| Ременная | – | 2–3 |
Выбор привода приспособления заключается в определении его вида (механический, гидравлический, пневматический) и расчете длины хода штока и диаметра цилиндра.
Расчеты деталей на прочность. Предварительно определяют силы, изгибающие и крутящие моменты, действующие в различных поперечных сечениях деталей и находят самые нагруженные сечения. Эту работу выполняют с использованием знаний из курсов деталей машин.
Расчет деталей привода расчет на прочность ведут по методу допускаемых напряжений. При этом сравнивают наибольшие рабочие нормальные и касательные напряжения σmax и τmax с допускаемыми напряжениями
σmax≤ [σ], МПа; τmax≤ [τ], МПа, (3.16)
где [σ] и [τ] – допускаемые (предельные) нормальное и касательное напряжения для материала, полученные на основании экспериментальных данных, МПа.
Допускаемое напряжение (на примере нормальных) определяют по формуле
 (3.17)
(3.17)
где σпр – предельное напряжение, МПа; n – коэффициент запаса прочности.
Для пластичных материалов за предельное напряжение при статической нагрузке принимается предел текучести σ0,2; для хрупких материалов – предел прочности σв. Для выбора допускаемых напряжений и запасов прочности в машиностроении пользуются табличным и дифференциальным (аналитическим) методами.
Табличный метод выбора допускаемых напряжений прост и удобен для пользования. Поэтому во всех случаях, когда в технических нормативных правовых актах имеются соответствующие таблицы допускаемых напряжений и запасов прочности, составленные для отдельных деталей и узлов машин, при выборе допускаемых напряжений и запасов прочности обычно пользуются табличным методом.
Дифференциальный метод определения допускаемых напряжений заключается в том, что допускаемое напряжение или запас прочности определяется по формуле, учитывающей различные факторы, влияющие на прочность рассчитываемых деталей (табл. 3.9).
Валы и оси, испытывающие циклические нагрузки, рассчитывают на усталостную прочность. При совместном действии напряжений кручения и изгиба запас усталостной прочности n определяют по формуле
 , (3.18)
, (3.18)
где nσ и nτ – запасы усталостной прочности по изгибу и кручению, соответственно; [n] – допустимый коэффициент запаса усталостной прочности.
Величины nσ и nτ определяются по зависимостям, приведенных в курсах деталей машин.
Таблица 3.9
Формулы для определения допускаемых напряжений дифференциальным методом
| Вид нагружения | Допускаемые напряжения | |||
| допускаемое напряжение на растяжение [σр], МПа | допускаемое напряжение на изгиб [σи], МПа | допускаемое напряжение на сжатие [σс], МПа | допускаемое напряжение на кручение [τк], МПа | |
| Статическая нагрузка, вызывающая постоянные напряжения для пластичных материалов | 
| 
| — | 
|
| Статическая нагрузка, вызывающая постоянные напряжения для хрупких материалов | 
| 
| 
| 
|
| Симметричный цикл изменения напряжений | 
| 
| — | 
|
| Пульсирующий цикл изменения напряжений | 
| 
| — | 
|
| Обозначения: [n] – допускаемый запас прочности; σ0,2 – условный предел текучести при растяжении, МПа; σти – предел текучести при изгибе, МПа; σв – предел прочности при растяжении, МПа; σви – предел прочности при изгибе, МПа; σ–в – предел прочности при сжатии МПа; σ–1р – предел выносливости при растяжении-сжатии (симметричный цикл изменения напряжений), МПа; σ–1 – предел выносливости при изгибе при симметричном цикле изменения напряжений, МПа; τт – предел текучести при кручении, МПа; τв – предел прочности при кручении МПа; τ–1 – предел выносливости при кручении при симметричном цикле изменения напряжений, МПа; εт – коэффициент (масштабный фактор), учитывающий уменьшение предела текучести с увеличением размеров детали; εв – коэффициент (масштабный фактор), учитывающий уменьшение предела прочности с увеличением размеров детали; εσ и ετ – коэффициенты (масштабные факторы), учитывающие уменьшение предела выносливости с увеличением размеров детали; β – коэффициент, учитывающий изменение поверхности в результате упрочнения и химико-термической обработки; kσ и kτ – эффективные коэффициенты концентрации напряжений; ψσ и ψτ – коэффициенты влияния асимметрии цикла напряжений на прочность детали. |
Расчеты на жесткость. Жесткость – это способность изделия сопротивляться действию внешних нагрузок с деформациями, допустимыми без нарушения работоспособности изделия.
Жесткость оценивается коэффициентом жесткости λ, который при растяжении-сжатии детали постоянного сечения в пределах упругой деформации равен
 (3.19)
(3.19)
где Р – сила, приложенная к детали, Н; ∆l – деформация, вызываемая приложенной к детали силой, мм; σ – нормальное напряжение в поперечном сечении детали, МПа; S – площадь поперечного сечения детали, мм2; E – модуль упругости, МПа; l – длина детали, мм.
При кручении детали постоянного сечения коэффициент жесткости равен
 (3.20)
(3.20)
где Mкр – крутящий момент, приложенный к детали, Н·мм; φ – угол поворота сечения детали, рад; G – модуль сдвига, МПа; Jр – полярный момент инерции, мм4.
Для случая изгиба детали постоянного сечения коэффициент жесткости равен
 (3.21)
(3.21)
где a – коэффициент, зависящий от условий нагружения при изгибе; J – момент инерции сечения детали, мм4.
В таблице 3.10 приведены значения коэффициента жесткости при изгибе для нескольких случаев нагружения. За единицу принято значение λизг, соответствующее изгибу двухопорного бруса, нагруженного сосредоточенной силой Р в середине пролета.
Таблица 3.10
Жесткость при изгибе для различных схем нагружения
| Схема нагружения | λизг | а | Схема нагружения | λизг | а | Схема нагружения | λизг | а |
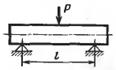
| 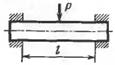
| 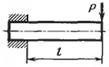
| 0,063 | |||||

| 1,5 | 
| 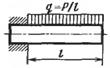
| 0,166 |
Условие жесткости выражается неравенством
umax ≤ [u], (3.22)
где umax – максимальное реальное перемещение выбранной точки детали; [u] – допускаемое перемещение, заданное из условий эксплуатации детали.
Основные конструктивные способы повышения жесткости деталей без существенного увеличения их массы:
– устранение изгиба, замена его растяжением или сжатием;
– для деталей, работающих на изгиб, целесообразна расстановка опор, исключение невыгодных по жесткости видов нагружения;
– рациональное, не сопровождающееся возрастанием массы, увеличение моментов инерции сечений;
– рациональное усиление ребрами, работающими предпочтительно на сжатие;
– усиление участков перехода от одного сечения к другому;
– привлечение жесткости смежных деталей.
Расчеты на износостойкость. Трущиеся детали в тихоходных передачах с частыми остановками оборудования, плохими условиями подвода смазки рассчитывают по допускаемому давлению в подшипнике
р = Р / (ld) ≤ [p], (3.23)
или по допускаемому произведению давления на скорость
рv = ≤ [pv], (3.24)
где Р – радиальная сила, Н; d – диаметр цапфы, м; l – длина подшипника, м; v – окружная скорость цапфы, м/с.
Допускаемые значения [p] и [pv] приведены в таблице 3.11.
Таблица 3.11
Допускаемые значения [p] и [pv] для подшипников скольжения
| Материал вкладыша | ≤ v, м/с | [p], МПа | ≤ [pv], МПа·м/с |
| Чугун серый | 0,5 | – | |
| 1,0 | – | ||
| Чугун антифрикционный АКЧ-1 | 0,5 | 2,5 | |
| Чугун антифрикционный АВЧ-2 | |||
| Бронза ОФ10-1 | |||
| Бронза АЖ9-4 | |||
| Латунь ЛКС 80-3-3 | |||
| Баббит Б16 | |||
| Баббит Б6 |
Расчеты на точность. Под точностью понимают степень соответствия фактических значений параметров изделия значениям этого параметра, заданного чертежом. Поскольку параметров изделия, как правило, много, то из большого их количества отбирают те параметры, которые играют решающую роль в оценке качества изделия. В оценке точности средств технологического оснащения наибольшее распространение получили геометрические показатели.
Допустимые отклонения параметра определяют допуск, как разность между двумя его предельными допустимыми значениями. Различают функциональные, конструкторские и технологические допуски. Функциональные допуски устанавливают, исходя из надежности изделия. К ним могут быть отнесены допуски на размеры проходных сечений жиклеров, форсунок, трубопроводов и др. Конструкторские допуски регламентируют изменение различных параметров изделия в течение его жизненного цикла. Технологические допуски составляют часть конструкторских допусков, они характеризуют изделие на момент его изготовления.
Погрешность установки заготовки в приспособлении εу как суммарное поле рассеяния размера обработки определяют по формуле
 , (3.25)
, (3.25)
где εб – погрешность базирования, которая возникает при несовпадении измерительной и технологической баз; εз – погрешность закрепления, возникающая из-за смещения измерительной базы относительно опор приспособления под действием сил закрепления; εпр – погрешность положения заготовки относительно режущего инструмента под влиянием неточного изготовления приспособления, его сборки и изнашивания опор; [εу] – допустимая погрешность установки заготовки, которая составляет часть допуска на размер.
Все составляющие формулы (3.25) приведены в справочной литературе.
Контрольные вопросы и задания
1. Изложите основы проектирование и расчета точности приспособлений и специальных средств измерений.
2. Приведите последовательность проектирования стендов (технологических машин).
3. Как организовано проектирование СТО на заводе?
4. Приведите основные методы поиска новых технических решений.
5. В чем заключается проектирование базовых исполнительных агрегатов (модулей) СТО?
6. Изложите основы проектирования типоразмерных рядов исполнительных агрегатов СТО.
7. Приведите последовательность компонования технологических машин из агрегатов, выбранных из оптимальных типоразмерных рядов.
8. В чем заключаются преимущества создания система исполнительных агрегатов технологических машин?
9. По каким критериям рассчитывают стенды и приспособления и их части?
Тематика исследований и рефератов
1. Обзор методов поиска новых технических решений.
2. Эволюция алгоритма решения изобретательских задач (АРИЗ) Альтшуллера Г.С., использование и значение его для поиска новых технических решений.
3. Унификация и стандартизация СТО и их частей в ремонтном производстве и влияние этих мероприятий на технический уровень и эффективность СТО.
4. Основы проектирования системы СТО ремонтного завода.
5. Компонование технологических машин из составных частей.
Требования, предъявляемые к студентам
Студент должен знать:
– порядок проектирования стендов, приспособлений и специальных средств измерений параметров расположения поверхностей;
– содержание расчетов разрабатываемых устройств;
– методы поиска новых технических решений при проектировании СТО;
– основы унификации и стандартизации элементов СТО;
– основы общей методики проектирования системы СТО;
– организацию проектирования СТО;
– методы проектирования базовых агрегатов и параметрических рядов агрегатов системы СТО;
– метод компонования технологических машин из агрегатов, выбранных из оптимальных типоразмерных рядов.
Студент должен уметь:
– разрабатывать приспособления для механической обработки заготовок и их контроля;
– разрабатывать стенды для разборки и сборки ремонтируемых агрегатов, нанесения покрытий на восстанавливаемые поверхности заготовок, испытания агрегатов и машины для очистки изделий;
– выполнять кинематические и точностные расчеты разрабатываемых устройств;
– рассчитывать детали устройств на прочность и жесткость;
– разрабатывать конструкции базовых агрегатов (модулей);
– разрабатывать типоразмерные ряды исполнительных агрегатов;
– компоновать технологические машины из агрегатов, выбранных из оптимальных типоразмерных рядов.
Рейтинговый контроль знаний материала раздела
Знания студентов оцениваются на основании собеседования с ними по результатам выполнения практических занятий 2, 3, 4 и 5.
Для получения высокой оценки необходимо обосновать преимущества проектирования системы СТО перед проектированием единичных технологических объектов, свободно владеть методами разработки конструкций базовых агрегатов (модулей), типоразмерных рядов исполнительных агрегатов и компонования технологических машин с использованием методов поиска новых технических решений.
Дата добавления: 2016-06-02; просмотров: 942;