Пример: двухзвенный манипулятор
Применение уравнений Лагранжа-Эйлера в форме (6-35) – (6-42) для описания динамики движения манипулятора рассмотрим на примере двухзвенного манипулятора с вращательными сочленениями (рис. 6.3).
Все оси сочленений рассматриваемого манипулятора параллельны оси z, перпендикулярной плоскости рисунка. Физические характеристики, такие, как положение центра масс, масса каждого звена и выбранные системы координат, указаны ниже. Требуется получить уравнения движения рассматриваемого двухзвенного манипулятора, основываясь на равенствах (6-35) – (6-42).
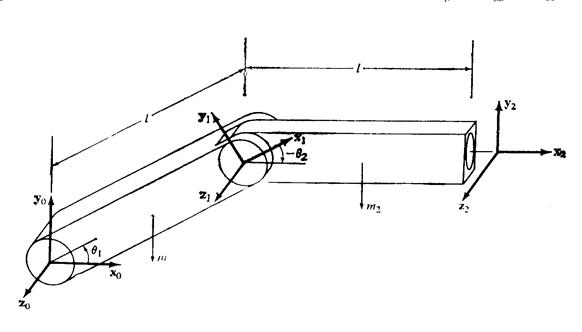
Рисунок 6.3. Двухзвенный манипулятор
Примем:
-присоединенными переменными являются  ;
;
-первое и второе звенья имеют массы  и
и 
-параметры звеньев имеют значения  ;
;  ;
;  .
.
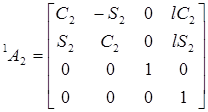
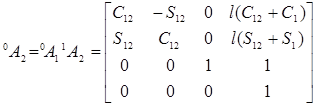
Тогда для матрицы  имеем:
имеем:
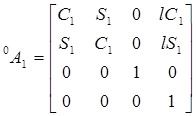 ,
,  ,
,
 ,
,
где 

В соответствии с определением матрицы  для вращательного сочленения имеем:
для вращательного сочленения имеем:
 .
.
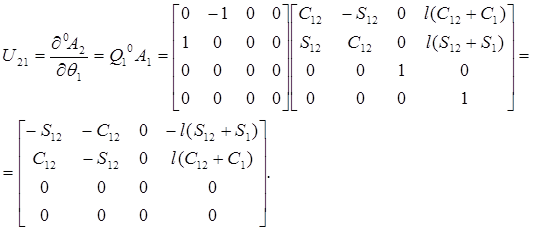
Используя выражение (6-19), получаем:
 .
.
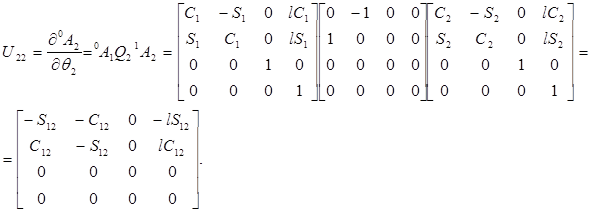
Аналогично для  и
и  получаем:
получаем:
Полагая, что центробежные моменты инерции равны нулю, получим формулу для матрицы псевдоинерции  :
:
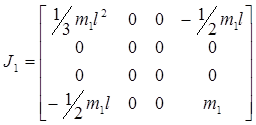 ;
; 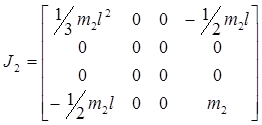 .
.
Для определения слагаемых, описывающих центробежное и кориолисово ускорение, воспользуемся равенством (6-40). Для i=1 оно дает:
 .
.
С помощью (6-41) можно получить значения коэффициентов  . Подставляя их в предыдущее выражение, имеем:
. Подставляя их в предыдущее выражение, имеем:
 .
.
Аналогично для i=2:
 .
.
Таким образом:
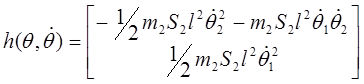 .
.
Слагаемые, определяющие влияние гравитационных сил  :
:
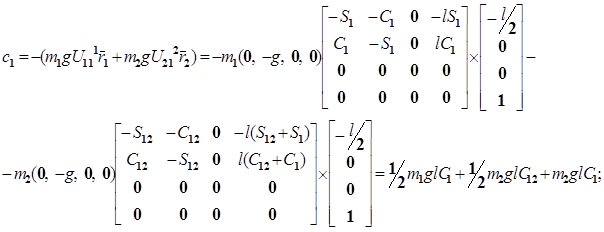
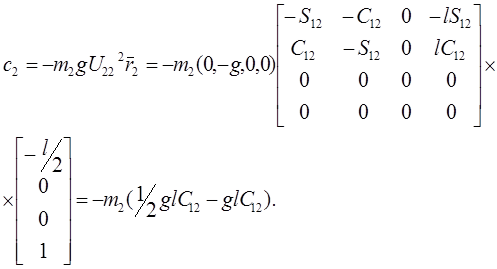
Таким образом, вектор, определяющий влияние силы тяжести:
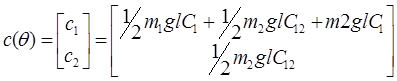 .
.
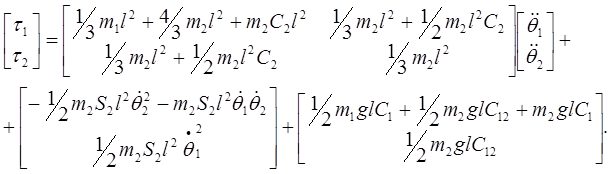
Окончательно имеем уравнения описывающие динамику движения двухзвенного манипулятора:
 ,
,
Дата добавления: 2016-05-25; просмотров: 1145;