Методы и средства совместной отладки аппаратных и программных средств
Этап совместной отладки аппаратных и программных средств в реальном масштабе времени является самым трудоемким и требует использования инструментальных средств отладки. К числу основных инструментальных средств отладки относятся:
внутрисхемные эмуляторы;
платы развития (оценочные платы);
мониторы отладки;
эмуляторы ПЗУ.
Внутрисхемный эмулятор – программно-аппаратное средство, способное заменить эмулируемый МК в реальной схеме. Стыковка внутрисхемного эмулятора с отлаживаемой системой производится при помощи кабеля со специальной эмуляционной головкой, которая вставляется вместо МК в отлаживаемую систему. Если МК нельзя удалить из отлаживаемой системы, то использование эмулятора возможно, только если этот микроконтроллер имеет отладочный режим, при котором все его выводы находятся в третьем состоянии. В этом случае для подключения эмулятора используют специальный адаптер-клипсу, который подключается непосредственно к выводам эмулируемого МК.
Внутрисхемный эмулятор – это наиболее мощное и универсальное отладочное средство, которое делает процесс функционирования отлаживаемого контроллера прозрачным, т.е. легко контролируемым, произвольно управляемым и модифицируемым.
Платы развития, или, как принято их называть в зарубежной литературе, оценочные платы (Evaluation Boards), являются своего рода конструкторами для макетирования электронных устройств. Обычно это печатная плата с установленным на ней МК и всей необходимой ему стандартной периферией. На этой плате также устанавливают схемы связи с внешним компьютером. Как правило, там же имеется свободное поле для монтажа прикладных схем пользователя. Иногда предусмотрена уже готовая разводка для установки дополнительных устройств, рекомендуемых фирмой. Например, ПЗУ, ОЗУ, ЖКИ-дисплей, клавиатура, АЦП и др. Кроме учебных или макетных целей, такие доработанные пользователем платы можно использовать в качестве одноплатных контроллеров, встраиваемых в малосерийную продукцию.
Для большего удобства платы развития комплектуются еще и простейшим средством отладки на базе монитора отладки. Используются два типа мониторов отладки: один для МК, имеющих внешнюю шину, а второй – для МК, не имеющих внешней шины.
В первом случае отладочный монитор поставляется в виде микросхемы ПЗУ, которая вставляется в специальную розетку на плате развития. Плата также имеет ОЗУ для программ пользователя и канал связи с внешним компьютером или терминалом. Во втором случае плата развития имеет встроенные схемы программирования внутреннего ПЗУ МК, которые управляются от внешнего компьютера. При этом программа монитора просто заносится в ПЗУ МК совместно с прикладными кодами пользователя. Прикладная программа должна быть специально подготовлена: в нужные места необходимо вставить вызовы отладочных подпрограмм монитора. Затем осуществляется пробный прогон. Чтобы внести в программу исправления, пользователю надо стереть ПЗУ и произвести повторную запись. Готовую прикладную программу получают из отлаженной путем удаления всех вызовов мониторных функций и самого монитора отладки. Возможности отладки, предоставляемые комплектом «плата развития плюс монитор», не столь универсальны, как возможности внутрисхемного эмулятора, да и некоторая часть ресурсов МК в процессе отладки отбирается для работы монитора. Тем не менее, наличие набора готовых программно-аппаратных средств, позволяющих без потери времени приступить к монтажу и отладке проектируемой системы, во многих случаях является решающим фактором. Особенно если учесть, что стоимость такого комплекта несколько меньше, чем стоимость более универсального эмулятора.
Эмулятор ПЗУ – программно-аппаратное средство, позволяющее замещать ПЗУ на отлаживаемой плате, и подставляющее вместо него ОЗУ, в которое может быть загружена программа с компьютера через один из стандартных каналов связи. Это устройство позволяет пользователю избежать многократных циклов перепрограммирования ПЗУ. Эмулятор ПЗУ нужен только для МК, которые могут обращаться к внешней памяти программ. Это устройство сравнимо по сложности и по стоимости с платами развития и имеет одно большое достоинство: универсальность. Эмулятор ПЗУ может работать с любыми типами МК.
Эмулируемая память доступна для просмотра и модификации, но контроль над внутренними управляющими регистрами МК был до недавнего времени невозможен.
В последнее время появились модели интеллектуальных эмуляторов ПЗУ, которые позволяют «заглядывать» внутрь МК на плате пользователя. Интеллектуальные эмуляторы представляют собой гибрид из обычного эмулятора ПЗУ, монитора отладки и схем быстрого переключения шины с одного на другой. Это создает эффект, как если бы монитор отладки был установлен на плате пользователя и при этом он не занимает у МК никаких аппаратных ресурсов, кроме небольшой зоны программных шагов, примерно 4К.
Этап совместной отладки аппаратных и программных средств в реальном масштабе времени завершается, когда аппаратура и программное обеспечение совместно обеспечивают выполнение всех шагов алгоритма работы системы. В конце этапа отлаженная программа заносится с помощью программатора в энергонезависимую память МК, и проверяется работа контроллера без эмулятора. При этом используются лабораторные источники питания. Часть внешних источников сигналов может моделироваться.
Этап интеграции разработанного контроллера в изделие заключается в повторении работ по совместной отладке аппаратуры и управляющей программы, но при работе в составе изделия, питании от штатного источника и с информацией от штатных источников сигналов и датчиков.
Состав и объем испытаний разработанного и изготовленного контроллера зависит от условий его эксплуатации и определяется соответствующими нормативными документами. Проведение испытаний таких функционально сложных изделий, как современные контроллеры, может потребовать разработки специализированных средств контроля состояния изделия во время испытаний.
Глава 6. Проектирование устройств на микроконтроллерах
- Лекция: Разработка программного обеспечения для PIC-микроконтроллеров
6.2. Разработка программного обеспечения для PIC-микроконтроллеров
Разработка программного обеспечения является центральным моментом общего процесса проектирования. Центр тяжести функциональных свойств современных цифровых систем находится именно в программных средствах.
Основным инструментом для профессиональной разработки программ является ассемблер, предполагающий детализацию на уровне команд МК. Только ассемблер позволяет максимально использовать ресурсы кристалла.
Для микроконтроллеров PIC выпущено большое количество различных средств разработки. В данной главе речь пойдет о средствах, предоставляемых фирмой Microchip, которые весьма эффективны и широко используются на практике.
6.2.1. Ассемблер MPASM
Ассемблер MPASM представляет собой интегрированную программную среду для разработки программных кодов PIC микроконтроллеров всех семейств. Выпускается фирмой Microchip в двух вариантах: для работы под DOS и для работы под Windows 95/98/NT. Ассемблер MPASM может использоваться как самостоятельно, так и в составе интегрированной среды разработки MPLAB. Он включает несколько программ: собственно MPASM, MPLINK и MPLIB, причем каждая из них обладает собственным интерфейсом.
Программа MPASM может использоваться для двух целей:
генерации исполняемого (абсолютного) кода, предназначенного для записи в МК с помощью программатора;
генерации перемещаемого объектного кода, который затем будет связан с другими ассемблированными или компилированными модулями.
Исполняемый код является для MPASM выходным кодом по умолчанию. При этом все переменные источника должны быть явно описаны в тексте программы или в файле, подключаемом с помощью директивы INCLUDE <filename>. Если при ассемблировании не выявляется ошибок, то генерируется выходной .hex-файл, который может быть загружен в МК с помощью программатора.
При использовании ассемблера MPASM в режиме генерации перемещаемого объектного кода формируются объектные модули, которые могут быть впоследствии объединены с другими модулями при помощи компоновщика MPLINK. Программа-компоновщик MPLINK преобразует перемещаемые объектные коды в исполняемый бинарный код, привязанный к абсолютным адресам МК. Библиотечная утилита MPLIB позволяет для удобства работы сгруппировать перемещаемые объекты в один файл или библиотеку. Эти библиотеки могут быть связаны компоновщиком MPLINK в файл выходного объектного кода ассемблера MPASM.
Программы MPASM и MPLINK доступны через оболочку MPASM, тогда как MPLIB доступна только со своей командной строки.
Исходным файлом для ассемблера MPASM по умолчанию является файл с расширением .ASM. Текст исходного файла должен соответствовать требованиям синтаксиса, приведенным далее.
Ассемблер MPASM может быть вызван командной строкой
MPASM [/<Option>[ /<Option>...]] <file_name>
где /<Option> означает выбор режима работы ассемблера в командной строке; <file_name> – имя файла на ассемблирование.
Режимы работы ассемблера, выбранные по умолчанию, приведены в табл. 6.1.
Таблица 6.1. Режимы работы ассемблера по умолчанию.Выбор Значение по умолчанию Описание
? N/A Вызвать помощь
a INHX8M Генерировать абсолютный .COD и hex выход непосредственно из ассемблера:
c On Выбрать/запретить случай чувствительности
e On Выбрать/запретить файл ошибок
h N/A Отобразить панель помощи MPASM
l On Выбрать/запретить файл листинга, генерированный из макроассемблера.
m On Вызвать/запретить макрорасширение
o N/A Установить путь для объектных файлов /o<path>\object.file
p None Установить тип процессора: /p<processor_type>;
q Off Разрешить/Запретить скрытый режим (запретить вывод на экран)
r Hex Определяет тип числа по умолчанию: /r<radix>
w 0
Определяет уровень диагностических сообщений в файле листинга /w<level>, где <level> может быть:
0 – сообщать все,
1 – сообщать о предупреждениях и ошибках,
2 – сообщать только об ошибках.
x Off Разрешить/запретить перекрестные ссылки в файле листинга.
Здесь и далее используются следующие соглашения по использованию символов:
[ ] – для аргументов по выбору;
< > – для выделения специальных ключей <TAB>, <ESC> или дополнительного выбора;
| – для взаимоисключающих аргументов (выбор ИЛИ);
строчные символы – для обозначения типа данных.
Выбор по умолчанию, приведенный в табл. 6.1, может быть изменен командной строкой:
/<option> разрешает выбор;
/<option>+ разрешает выбор;
/<option> – запрещает выбор.
Исходный ассемблерный файл создается с использованием любого ASCII текстового редактора. Каждая линия исходного файла может содержать до четырех типов информации:
метки (labels)
мнемоника (mnemonics)
операнды (operands)
комментарий (comments)
Порядок и положение каждого типа имеет значение. Метка должна начинаться в колонке номер один. Мнемоника может начинаться в колонке два или далее. Операнды идут за мнемоникой. Комментарий может следовать за операндом, мнемоникой или меткой или может начинаться в любом столбце, если в качестве первого не пустого символа используется * или ;.
Максимальная длина строки 255 символов.
Один или несколько пробелов должны отделять метку и мнемонику или мнемонику и операнд(ы). Операнды могут отделяться запятой. Например:
List p=16C54, r=HEX
ORG 0x1FF ;Вектор сброса
GOTO START ;Возврат на начало
ORG 0x000 ;Адрес начала исполнения
;программы
START
MOVLW 0x0A ;Выполнение программы
;PIC МК
MOVLW 0x0B ;Выполнять всегда
GOTO START
END
Метки
В поле метки размещается символическое имя ячейки памяти, в которой хранится отмеченный операнд. Все метки должны начинаться в колонке 1. За ними может следовать двоеточие (:), пробел, табуляция или конец строки. Комментарий может также начинаться в колонке 1, если используется одно из обозначений комментария.
Метка может начинаться с символа или нижнего тире (_) и содержать буквенные символы, числа, нижние тире и знак вопроса. Длина метки может быть до 32 символов.
Мнемоники
Мнемоники представляют собой мнемонические обозначения команды, которые непосредственно транслируются в машинный код. Мнемоники ассемблерных инструкций, директивы ассемблера и макровызовы должны начинаться, по крайней мере, в колонке 2. Если есть метка на той же линии, она должна быть отделена от этой метки двоеточием или одним или более пробелами или табуляцией.
Операнды
В этом поле определяются операнды (или операнд), участвующие в операции. Операнды должны быть отделены от мнемоники одним или более пробелами или табуляцией. Операнды отделяются друг от друга запятыми. Если операция требует фиксированного номера (числа) или операндов, то все на линии после операндов игнорируется. Комментарии разрешаются в конце линии. Если мнемоники позволяют использовать различное число операндов, конец списка операндов определяется концом строки или комментарием.
Выражения используются в поле операнда и могут содержать константы, символы или любые комбинации констант и символов, разделенных арифметическими операторами. Перед каждой константой или символом может стоять + или –, что указывает на положительное или отрицательное выражение.
В ассемблере MPASM используются следующие форматы выражений:
текстовая строка;
числовые константы и Radix;
арифметические операторы и приоритеты;
High / Low операторы.
Текстовая строка – это последовательность любых допустимых ASCII символов (в десятичном диапазоне от 0 до 127), заключенная в двойные кавычки. Строка может иметь любую длину в пределах 132 колонок. При отсутствии ограничения строки она считается до конца линии. Если строка используется как буквенный операнд, она должна иметь длину в один символ, иначе будет ошибка.
Числовая константа представляет собой число, выраженное в некоторой системе счисления. Перед константой может стоять + или –. Промежуточные величины в константах рассматриваются как 32-разрядные целые без знака.
MPASM поддерживает следующие системы счисления (представления значений или Radix): шестнадцатиричную, десятичную, восьмиричную, двоичную и символьную. По умолчанию принимается шестнадцатиричная система. Табл. 6.2 представляет различные системы счисления.
Операторы – это арифметические символы, подобные + и –, которые используются при формировании выражений. Каждый оператор имеет свой приоритет. В общем случае приоритет устанавливается слева направо, а выражения в скобках оцениваются первыми. В табл. 6.3 приведены обозначения, описания и примеры применения основных операторов MPASM.
Таблица 6.2. Системы счисления (Radix).Тип Синтаксис Пример
Десятичная D'<цифры>' или .<цифры> D'100' или .100
16-ричная H'<цифры>' или 0x<цифры> H'9f' или 0x9f
Восьмиричная O'<цифры>' O'777'
Двоичная B'<цифры>' B'00111001'
Символьная '<символ>' или A'<символ>' "C" или A'C'
Таблица 6.3. Основные арифметические операторы MPASMОператор Описание Пример
$ Текущий счетчик команд goto $ + 3
( левая скобка 1 + ( d * 4 )
) правая скобка ( lenght + 1 ) * 255
! операция «НЕ» (логическая инверсия) if ! ( a - b )
~ дополнение flags = ~ flags
- инверсия (двоичное дополнение) – 1 * lenght
High выделить старший байт слова movlw high llasid
Low выделить младший байт слова movlw low (llasid + .251)
upper выделить наибольший байт слова movlw upper (llasid + .251)
* Умножение a = c * b
/ Деление a = b / c
% Модуль lenght = totall % 16
+ Сложение Tot_len = lenght * 8 + 1
- Вычитание Entry_Son = ( Tot – 1 ) / 8
<< сдвиг влево Val = flags << 1
>> сдвиг вправо Val = flags >> 1
>= больше либо равно if ent >= num
> больше if ent > num
< меньше if ent < num
<= меньше либо равно if ent <= num
== равно if ent == num
!= не равно if ent != num
& поразрядное «И» flags = flags & err_bit
^ поразрядное «ИСКЛЮЧАЮЩЕЕ ИЛИ» flags = flags ^ err_bit
| поразрядное «ИЛИ» flags = flags | err_bit
&& логическое «И» if (len == 512)&&( b == c )
|| логическое «ИЛИ» if (len == 512 ) || ( b == c )
= установить равным... entry_index = 0
++ увеличить на 1 (инкремент) i ++
— уменьшить на 1 (декремент) i —
Операторы high, low и upper используются для получения одного байта из многобайтного значения, соответствующего метке. Применяются для управления расчетом точек динамического перехода при чтении таблиц и записи программ.
Операторы инкремента и декремента могут применяться к переменной только в качестве единственного оператора в строке. Они не могут быть встроенным фрагментом более сложного выражения.
Комментарии
Поле комментария может использоваться программистом для текстового или символьного пояснения логической организации программы. Поле комментария полностью игнорируется ассемблером, поэтому в нем можно применять любые символы. Комментарии, которые используются в строке сами по себе, должны начинаться с символа комментария (* или ;). Комментарии в конце строки должны быть отделены от остатка строки одним или более пробелами или табуляцией.
Расширения файлов, используемые MPASM и утилитами
Существует ряд расширений файлов, применяемых по умолчанию MPASM и связанными утилитами. Назначения таких расширений приведены в табл. 6.4.
Таблица 6.4. Используемые по умолчанию назначения расширений файлов.Расширение Назначение
.ASM Входной файл ассемблера для MPASM <source_name>.ASM
.OBJ Выходной файл перемещаемого объектного кода из MPASM <source_name>.OBJ
.LST Выходной файл листинга, генерируемый ассемблером MPASM или MPLINK: <source_name>.LST
.ERR Выходной файл ошибок из MPASM: <source_name>.ERR
.MAP Выходной файл распределения памяти из MPASM: <source_name>.MAP
.HEX Выходной файл объектного кода в шестнадцатиричном представлении из MPASM: <source_name>.HEX
.HXL/.HXH Выходной файл объектного кода в шестнадцатиричном представлении c раздельным представлением младших и старших байт: <source_name>.HXL, <source_name>.HXH
.LIB Библиотечный файл, созданный MPLIB и привязанный компоновщиком MPLINK: <source_name>.LIB
.LNK Выходной файл компоновщика: <source_name>.LNK
.COD Выходной символьный файл или файл отладчика. Формируются MPASM или MPLINK: <source_name>.COD
Листинг представляет собой текстовый файл в формате ASCII, который содержит машинные коды, сгенерированные в соответствии с каждой ассемблерной командой, директивой ассемблера или макрокомандой исходного файла. Файл листинга содержит: имя продукта и версии, дату и время, номер страницы вверху каждой страницы.
В состав листинга входят также таблица символов и карта использования памяти. В таблице символов перечисляются все символы, которые есть в программе, и где они определены. Карта использования памяти дает графическое представление о расходовании памяти МК.
Директивы языка
Директивы языка – это ассемблерные команды, которые встречаются в исходном коде, но не транслируются прямо в исполняемые коды. Они используются ассемблером при трактовке мнемоники входного файла, размещении данных и формировании файла листинга.
Существует четыре основных типа директив в MPASM:
директивы данных;
директивы листинга;
управляющие директивы;
макро-директивы.
Директивы данных управляют распределением памяти и обеспечивают доступ к символическим обозначениям данных.
Директивы листинга управляют листингом файла MPASM и форматом. Они определяют спецификацию заголовков, генерацию страниц и другие функции управления листингом.
Директивы управления позволяют произвести секционирование обычного ассемблерного кода.
Макро-директивы управляют исполнением и распределением данных в пределах определений макротела.
Ниже приводится описание некоторых директив ассемблера MPASM, используемых в данном учебном пособии.
CODE – начало секции объектного кода
Синтаксис:
[<label>] code [ROM address>]
Используется при генерации объектных модулей. Объявляет начало секции программного кода. Если <label> не указана, секция будет названа code. Стартовый адрес устанавливается равным указанному значению или нулю, если адрес не был указан.
Пример:
RESET code H'01FF'
goto START
#DEFINE – определить метку замены текста
Синтаксис:
#define <name> [<string>]
Директива задает строку <string>, замещающую метку <name> всякий раз, когда та будет встречаться в исходном тексте.
Символы, которые определены директивой #DEFINE, не могут быть просмотрены симулятором. Используйте вместо этой директивы EQU.
Пример
#define length 20
#define control 0x19,7
#define position (X,Y,Z) (y-(2 * Z +X)).
test_label dw position(1, length, 512)
bsf control ; установить в 1 бит 7 в f19
END – конец программного блока
Синтаксис:
end
Определяет конец программы. После остановки программы таблица символов сбрасывается в файл листинга.
Пример:
start
;исполняемый код
;
end ; конец программы
EQU – определить ассемблерную константу
Синтаксис:
<label> equ <expr>
Здесь <expr> – это правильное MPASM выражение. Значение выражения присваивается метке <label>.
Пример:
four equ 4 ; присваивает численное значение
; метке four
INCLUDE – включить дополнительный файл источника
Синтаксис:
include <<include_file>>
include "<include_file>"
Определяемый файл считывается как источник кода. По окончании включаемого файла будет продолжаться ассемблирование исходника. Допускается до шести уровней вложенности. <include_file> может быть заключен в кавычки или угловые скобки. Если указан полный путь к файлу, то поиск будет происходить только по этому пути. В противном случае порядок поиска следующий: текущий рабочий каталог, каталог, в котором находится исходник, каталог MPASM.
Пример:
include "c:\sys\sysdefs.inc" ; system defs
include <addmain.asm> ; register defs
LIST – установить параметры листинга
Синтаксис:
list [<list_option>, , <list_option>]
Директива <list> разрешает вывод листинга, если он до этого был запрещен. Кроме того, один из параметров листинга может быть изменен для управления процессом ассемблирования в соответствии с табл. 6.5.
Таблица 6.5. Параметры, используемые директивой list.Параметр Значение по умолчанию Описание
C=nnn 80 Количество символов в строке
n=nnn 59 Количество строк на странице
t=ON|OFF OFF Укорачивать строки листинга
p=<type> None Установить тип процессора: PIC16C54, PIC16C84, PIC16F84, PIC17C42 и др.
r=<radix> HEX Установить систему счисления по умолчанию: hex, dec, oct.
w=<level> 0
Установить уровень сообщений диагностики в файле листинга:
0 – выводить все сообщения;
1 – выводить предупреждения и ошибки;
2 – выводить только ошибки.
x=ON|OFF OFF Включить или выключить макрорасширения.
NOLIST – выключить выход листинга
Синтаксис:
NOLIST
ORG – установить начальный адрес программы
Синтаксис:
<label> org <expr>
Устанавливает начальный адрес программы для последующего кода в соответствии с адресом в <expr>. MPASM выводит перемещаемый объектный код, а MPLINK разместит код по определенному адресу. Если метка <label> определена, то ей будет присвоена величина <expr>. По умолчанию начальный адрес имеет нулевое значение. Директива может не использоваться, если создается объектный модуль.
Пример:
int_1 org 0x20; Переход по вектору 20
int_2 org int_1+0x10; Переход по вектору 30
PROCESSOR – установить тип процессора
Синтаксис:
processor <processor_type>
Устанавливает тип используемого процессора <processor_type>: [16C54 | 16C55 | 16C56 | 16C57 | 16C71 | 16C84 | 16F84 | 17C42]. Общие процессорные семейства могут быть выбраны как:[16C5X | 16CXX | 17CXX]
Для поддержания совместимости с новыми изделиями выбирается максимум доступной памяти.
SET – определить ассемблерную переменную
Синтаксис:
<label> set <expr>
Директива SET функционально эквивалентна директиве EQU, за исключением того, что величина, определяемая SET, может быть изменена директивой SET.
Пример:
area set 0
width set 0x12
length set 0x14
area set length * width
length set length + 1
TITLE – Определить программный заголовок
Синтаксис:
title "<title_text>"
Эта директива устанавливает текст, который используется в верхней линии страницы листинга. <title_text> - это печатная ASCII последовательность, заключенная в двойные скобки. Она может быть до 60 символов длиной.
Пример
title "operational code, rev 5.0"
6.2.2. Компоновщик MPLINK
Абсолютный (неперемещаемый) код программы генерируется непосредственно при ассемблировании и располагается в программной памяти в порядке следования операторов программы. Операторы перехода на метку сразу же заменяются соответствующим кодом перехода на адрес метки.
При генерации перемещаемого кода каждая секция программного кода должна предваряться директивой CODE. Окончательное размещение программных кодов, расстановку физических адресов переходов выполняет компоновщик MPLINK.
Компоновщик MPLINK выполняет следующие задачи:
распределяет коды и данные, т.е. определяет, в какой части программной памяти будут размещены коды и в какую область ОЗУ будут помещены переменные;
распределяет адреса, т.е. присваивает ссылкам на внешние объекты в объектном файле конкретные физические адреса;
генерирует исполняемый код, т.е. выдает файл в формате .hex, который может быть записан в память МК;
отслеживает конфликты адресов, т.е. гарантирует, что программа или данные не будут размещаться в пространстве адресов, которое уже занято;
предоставляет символьную информацию для отладки.
Для более подробного изучения работы компоновщика следует обратиться к специальной литературе.
6.2.3. Менеджер библиотек MPLIB
Менеджер библиотек позволяет создавать и модифицировать файлы библиотек. Библиотечный файл является коллекцией объектных модулей, которые размещены в одном файле. MPLIB использует объектные модули с именем типа «filename.o» формата COFF (Common Object File Format).
Использование библиотечных файлов упрощает компоновку программы, делает ее более структурированной и облегчает ее модификацию.
6.2.4. Симулятор MPSIM
Симулятор MPSIM представляет собой симулятор событий, предназначенный для отладки программного обеспечения PIC-контроллеров. MPSIM моделирует все функции контроллера, включая все режимы сброса, функции таймера/счетчика, работу сторожевого таймера, режимы SLEEP и Power-down, работу портов ввода/вывода.
MPSIM запускается из командной строки DOS, конфигурируется пользователем и непосредственно применяет выходные данные ассемблера MPASM.
Перед использованием симулятора необходимо отассемблировать исходный файл <file_name>.asm и получить файл объектного кода в формате INHX8M, создаваемый MPASM по умолчанию:
MPASM <file_name>.asm <RETURN>
Чтобы запустить симулятор, необходимо набрать в командной строке
MPSIM<RETURN>.
Вид экрана, получаемого при запуске MPSIM, показан на рис. 6.2. Экран разделен на три части, или окна. В верхнем окне показано текущее состояние моделирования, включая моделируемую программу, тип МК, число выполненных командных циклов и затраченное на них время. Среднее окно используется для вывода содержимого регистров пользователя. Набор регистров и формат выводимых на экран данных определяются файлом MPSIM.INI, который далее будет описан подробнее. Нижнее окно содержит приглашение на ввод команд, а также текущие операции и результат их выполнения.
При запуске симулятор MPSIM начинает искать командный файл MPSIM.INI. Этот текстовой файл создается пользователем и используется для задания всех задействованных в программе параметров.
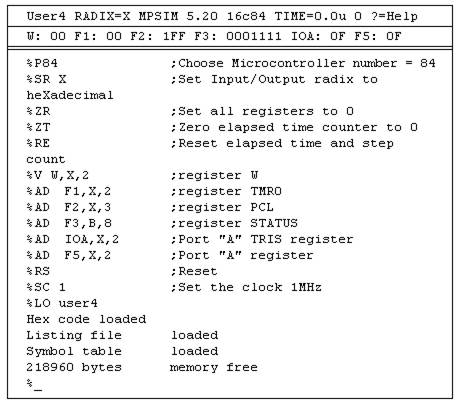
Рис. 6.2. Вид рабочего окна симулятора MPSIM.
Один из примеров файла MPSIM.INI приведен ниже.
Пример 12.1. Пример файла MPSIM.INI (html, txt)
В представленном файле указаны: тип микроконтроллера, система счисления данных по умолчанию, регистры, содержимое которых выводится на экран, способ представления данных, рабочие параметры. Любая команда, которая исполняется MPSIM, может быть задана в файле MPSIM.INI, который определяет начальное состояние программы. При работе MPSIM создает файл MPSIM.JRN, в котором сохраняются все сведения о нажатии клавиш в процессе работы.
В файле MPSIM.INI допускается вводить комментарии, которые даются после знака «;», но не допускается использование пустых строк.
Основные команды, применяемые в симуляторе MPSIM, приведены в табл. 6.6. Когда эти команды вводятся в сеансе работы с MPSIM, они заносятся в файл MPSIM.JRN, который используется при создании расширенного файла MPSIM.INI. Данный файл можно задействовать для выявления ошибок и обеспечения нормального выполнения программы после исправления кода.
Таблица 6.6. Основные команды симулятора MPSIM.Команда Параметр Комментарии
AB - Прерывание текущей сессии
AD Reg[, Radix[, Digits]] Вывод содержимого регистра на экран в указанном формате и заданной системе счисления X, B или D
B [addr] Установка точки останова по текущему или указанному адресу
C [#break] Продолжение выполнения программы с пропуском указанного количества следующих точек останова
DB - Вывод на экран всех активных точек останова
DI [addr1[,addr2]] Вывод на экран фрагмента памяти программ
DR - Вывод содержимого всех регистров
DW [E|D] Разрешение/запрещение функционирования сторожевого таймера
E [addr] Выполнение программы с текущего или указанного адреса
F Reg Вывод на экран содержимого регистра и возможность его редактирования пользователем
GE filename Получение и выполнение командного файла. Это способ загрузки командного файла .INI
GO - Запуск МК и начало выполнения программы
IP [time|step] Ввод входных воздействий в соответствии со значением параметра step в файле Stimulus
LO filename Загрузка в MPSIM файлов .HEX и .COD
M addr Вывод на экран содержимого памяти программ, начиная с адреса «addr» и возможность его редактирования. Ввод «Q» завершает команду.
P device Выбор типа моделируемого МК
Q - Выход из MPSIM и запись команд в файл .JRN
RE - Сброс времени выполнения и счетчика циклов
RS - Сброс моделируемого МК
SE pin|port Вывод на экран состояния указанного вывода или порта и возможность его изменения
SR O|X|D Установка системы счисления по умолчанию
SS [addr] Пошаговое исполнение, начиная с указанного адреса. При отсутствии адреса – исполнение идет с текущего места
ST filename Загрузка файла стимуляции
W Отображение состояния регистра W с возможностью его модификации
ZM addr1,addr2 Очистка памяти программ с адреса addr1 по addr2
ZR - Сброс всех регистров МК
ZT - Сброс таймера/счетчика МК
Для моделирования внешних тестовых событий (воздействий) на моделируемый МК используются файлы стимуляции с расширением .STI. Эти файлы используются MPSIM для того, чтобы обеспечить подачу однократных и повторяющихся входных сигналов в процессе выполнения программы. При этом можно наблюдать на экране, как МК реагирует на сигналы.
В качестве примера ниже приведен файл для тестирования программы, выполняющей опрос состояния линии 1 порта A.
! test1.STI
STEP RA1
1 1 !Установка на входе RA1 состояния "1"
200 0 !Поступление на вход RA1 сигнала "0"
1000 1 !Переход сигнала на входе RA1 в "1"
1200 0 !Повторная подача нулевого сигнала
Файл воздействия состоит из множества состояний, для которых задается параметр STEP, определяющий число циклов, в течение которых поддерживается указанное состояние. Он позволяет одновременно подавать сигналы на различные выводы МК. В файле воздействия можно указать любой вывод МК, в том числе и вывод сброса (_MCLR). Для обозначения комментариев используется знак !.
6.3. Практика программирования PIC-микроконтроллеров
6.3.1. Описание лабораторного макета
Для того чтобы написать первые учебные программы и проверить их функционирование, желательно иметь относительно несложный макет, содержащий самые распространенные периферийные устройства. Схема подобного макета, используемого при выполнении лабораторных работ студентами, приведена на рис. 6.3.
Макет питается от источника стабилизированного напряжения +5В. Тактовая частота МК задается RC-цепью и составляет около 2 МГц. К линии RA0 порта А подключен биполярный транзистор в ключевом режиме, нагруженный на динамик ВА1. Звучание динамика обеспечивается подачей на выход RA0 изменяющегося сигнала в звуковом диапазоне. К линии RA1 порта А подключен светодиод VD2, светящийся при высоком напряжении на выходе. Тумблеры SA1 и SA2, а также кнопки SB1 и SB2 подключены, соответственно, к линиям RA2 и RA3 порта А, а также к линии RA4 порта А и линии RB0 порта В. Исходное состояние кнопок – разомкнутое, что обеспечивает подачу на соответствующие входы МК высокого уровня сигнала.
Линии RB1 – RB7 порта B обслуживают семисегментный индикатор HL1 с общим анодом. Поэтому свечение сегмента индикатора обеспечивается при низком уровне сигнала на соответствующем выходе порта B. Макет также содержит средства программирования и связи с компьютером, которые на схеме не показаны.
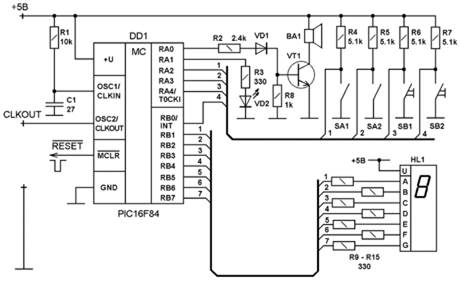
Рис. 6.3. Схема лабораторного макета.
6.3.2. Инициализация микроконтроллера макета
Прежде чем переходить к созданию простейших пользовательских программ, необходимо описать используемые в дальнейшем переменные и настроить МК на работу с выбранным макетом. С этой целью мы напишем и подробно рассмотрим листинг исходной программы init.asm, в состав которой будут включаться все остальные программы пользователя.
Листинг 12.1. Программа init.asm (html, txt)
Рассмотрим работу этой программы. Вначале она указывает ассемблеру тип используемого МК и систему счисления по умолчанию. Идущие далее ассемблерные директивы EQU определяют ассемблерные константы, используемые в этой и последующих программах. Они позволяют использовать в тексте программы более удобные мнемонические метки, привязанные к структуре конкретного МК, вместо корректных, но более сложных ассемблерных выражений. Указатели TEMPA, TEMPB, COUNT1 и COUNT2 назначают адреса ячеек памяти для хранения промежуточных данных (текущих состояний, переменных циклов и т.п.).
Ассемблерные директивы #define задают строку, замещающую соответствующую метку, каждый раз, когда та будет встречаться в исходном тексте. В нашем случае эти директивы позволяют использовать символические имена, привязанные к схеме макета, вместо физических адресов соответствующих разрядов портов и регистров. При этом необходимо иметь в виду, что символы, которые определены директивой #DEFINE, не могут быть просмотрены симулятором. Поэтому для просмотра необходимо использовать физические адреса портов и регистров.
Директива ORG 0x00 устанавливает стартовый адрес программного кода равным 0, т.е. соответствующим начальному состоянию счетчика команд МК после сброса. Команда GOTO BEGIN вместе с ассемблерной директивой ORG 0x005 и меткой BEGIN обеспечивают переход на адрес памяти программ 0x005, начиная с которого и размещается основная часть программы. Это необходимо для того, чтобы обойти адрес 0x004, используемый в качестве вектора прерывания, и тем самым зарезервировать его для возможных будущих применений.
Затем с помощью команды CALL INIT_PORTS производится вызов подпрограммы инициализации портов. Вначале подпрограмма инициализации устанавливает в высокое (единичное) состояние выходные триггеры данных. Эта операция рекомендуется разработчиком МК для того, чтобы исключить неопределенность в состояниях регистров портов. Затем командой BSF STATUS,RP0 производится переключение на банк 1 памяти данных, где расположены регистры управления направлением передачи информации TRISA и TRISB. С помощью команд MOVLW 0x1C и MOVWF TRISA линии RA0 и RA1 порта A настраиваются на вывод, а остальные – на ввод. Команды MOVLW 0x01 и MOVWF TRISB настраивают линию RB0 порта B на ввод, а остальные – на вывод. С помощью команды BCF STATUS,RP0 производится возврат в банк 0, где располагаются необходимые для работы программы регистры и порты.
Поскольку в процессе работы с макетом перенастройка портов не производится, и введенных переменных достаточно для работы всех рассматриваемых учебных задач, они будут далее рассматриваться включенными по умолчанию в состав исходной программы init.asm. При написании учебных задач будет по возможности использоваться метод структурного программирования, при котором прикладная программа строится из некоторого набора программных модулей, каждый из которых реализует определенную процедуру обработки данных. При этом каждый из программных модулей имеет только одну точку входа и одну точку выхода. Введенные однажды программные модули могут использоваться под своим именем в других прикладных программах.
6.3.3. Программирование учебных задач
Начнем программирование учебных задач с написания программы, которая считывает состояние кнопки SB1 и выводит его на светодиодный индикатор VD2 так, что не нажатому состоянию кнопки (высокому уровню сигнала на входе RA4) соответствует светящееся состояние светодиода, и наоборот.
Листинг 12.2. (html, txt)
Основная программа содержит замкнутый цикл LOOP – GOTO LOOP, необходимый для периодического повторения цикла контроля состояния кнопки и вывода его на индикатор. Команда CLRWDT исключает влияние возможного сброса по переполнению сторожевого таймера на работу программы. Две следующие команды осуществляют вызов подпрограмм GET_RA и SB1_VD2. Первая из них (GET_RA) вначале считывает текущее состояние порта A, которое помещается в рабочий регистр W. Поскольку рабочий регистр может потребоваться при исполнении других команд, его состояние записывается в регистр TEMPA, используемый здесь для временного хранения состояния порта A. Таким образом, после возврата из подпрограммы GET_RA в разряде 4 регистра TEMPA содержится информация о состоянии кнопки SB1: «1» – не нажата, «0» – нажата.
Подпрограмма SB1_VD2 анализирует состояние разряда 4 регистра TEMPA и, в зависимости от него, зажигает или гасит светодиод. В системе команд МК PIC16F84 нет команд условного перехода, поэтому для организации проверки того или иного условия используются команды, позволяющие пропустить выполнение следующей команды программы, в зависимости от состояния определенного бита в заданном регистре (BTFSS и BTFSC). В частности, команда BTFSS TEMP,4 пропускает исполнение команды GOTO P0, если TEMP,4 = 1 (кнопка не нажата). Тем самым реализуется команда BSF VD2, которая зажигает светодиод VD2. Затем анализируется условие TEMP,4 = 0 (кнопка нажата) и, если оно имеет место, светодиод гасится.
Возможна более простая реализация заданного алгоритма, поскольку нажатое состояние кнопки исключает не нажатое (и наоборот), но представленный вариант более нагляден.
Рассмотрим более сложный вариант программы, предусматривающий зажигание светодиода VD2 только при следующем состоянии тумблеров и кнопок макета: SA1 = 1, SA2 = 1, SB1 = 1 и SB2 = 0.
Листинг 12.3. (html, txt)
Подпрограммы GET_RA и GET_RB помещают в регистры TEMPA и TEMPB текущие состояния портов A и B, соответственно. Подпрограмма ZAG_1110 анализирует состояния разрядов 2,3 и 4 регистра TEMPA и разряда 0 регистра TEMPB, и при условии TEMPA,2,3,4 = 1,1,1 и TEMPB,0 = 0, зажигает светодиод VD2. При невыполнении хотя бы одного из этих условий светодиод гасится.
Использование директивы INCLUDE GET_PORTA.ASM позволяет включать уже отлаженные модули подпрограмм в текущую программу. Для того чтобы этой возможностью можно было воспользоваться, необходимо сохранять отлаженные модули в виде отдельных ассемблерных файлов.
Попробуем теперь использовать семисегментный индикатор для контроля состояния тумблеров макета. Вначале напишем программу, которая выводит на индикатор HL семисегментное изображение любого двоичного числа от 0b до 1111b в шестнадцатиричном представлении.
Листинг 12.4. (html, txt)
Программа начинает свою работу с пересылки константы 0x0A в рабочий регистр W. Затем производится вызов подпрограммы обслуживания семисегментного индикатора SEV_SEG. Работа подпрограммы SEV_SEG начинается с маскирования 4-х младших разрядов W и обнуления 4-х старших. Тем самым из анализа исключаются старшие разряды передаваемого из рабочего регистра W числа. Затем маскированное содержимое регистра W добавляется к текущему состоянию младшего байта счетчика команд PCL, и результат помещается в PCL. Таким образом, производится дополнительное смещение счетчика команд на величину, которая была передана в рабочем регистре. Например, если было W=0, то содержимое счетчика команд не изменится, и будет выполнена следующая команда RETLW 0x80, которая вызовет возврат из подпрограммы с записью 0x80 = B'1000000' в регистр W. Если, как было в при веденной программе, W=0A, то к содержимому PCL будет добавлено число 0x0A, и произойдет дополнительное смещение на 10 шагов. В результате будет выполнена команда RETLW 0x10, которая вызовет возврат из подпрограммы с записью 0x10 = B'0001000' в регистр W.
После возврата из подпрограммы производится пересылка W в PORTB и отображение его состояния на семисегментном индикаторе HL. В частности, если W = 0, то при выводе 1000000b на порт B семисегментный индикатор покажет 0, а при W = A покажет A.Таким образом, может быть отображено любое 4-разрядное двоичное число.
Метод прямого управления счетчиком команд, использованный в подпрограмме SEV_SEG, может применяться для реализации табличной конвертации чисел. При этом необходимо иметь в виду, что данный метод не позволяет конвертировать более 256 значений в одной таблице. Кроме того, программа табличной конвертации должна целиком располагаться внутри 256-байтного блока во избежание переполнения младшего байта счетчика команд.
Используя подпрограмму SEV_SEG, напишем теперь программу, которая читает состояния тумблеров SA1 и SA2 и выводит на индикатор соответствующее число.
Листинг 12.5. (html, txt)
Подпрограмма GET_RA помещает в регистр TEMPA текущее состояние порта A. Таким образом, в разрядах 2 и 3 регистра TEMPA хранится текущее состояние тумблеров SA1 и SA2. Для того чтобы биты состояния тумблеров заняли позиции 0 и 1 регистра TEMPA, производится два сдвига вправо через перенос, причем результат второго сдвига помещается в регистр W. Затем накладывается маска на два младших разряда рабочего регистра и производится вызов подпрограммы SEV_SEG. После выхода из подпрограммы результат подается на порт B и отображается на индикаторе.
Рассмотрим теперь программы, работающие в реальном масштабе времени, т.е. выдающие сигналы определенной длительности и частоты следования, либо учитывающие временные параметры входных сигналов. Основным элементом таких программ является подпрограмма формирования временной задержки. Рассмотрим один из возможных вариантов такой подпрограммы с использованием программных методов формирования задержки, т.е. без применения встроенного таймера.
Листинг 12.6. (html, txt)
Основная программа производит вызов подпрограммы DELAY с некоторой константой L в рабочем регистре W, определяющей число внутренних циклов подпрограммы. Подпрограмма DELAY начинает свою работу с загрузки содержимого рабочего регистра в регистр пользователя COUNT1. Команда DECFSZ COUNT1,F уменьшает на единицу содержимое регистра COUNT1 и проверяет его на равенство нулю. Нулевое состояние регистра COUNT1 приводит к выходу из цикла и возврату из подпрограммы. Для исполнения каждого внутреннего цикла требуется три машинных цикла МК (1 цикл на исполнение команды DECFSZ при ненулевом результате и 2 цикла на каждую команду GOTO). Выход из подпрограммы DELAY потребует 4-х циклов (2 цикла на исполнение команды DECFSZ при нулевом результате и 2 цикла на RETURN). Если добавить к этому еще 4 цикла, необходимых для загрузки константы в рабочий регистр , вызова подпрограммы и загрузки регистра пользователя COUNT1, то общее время исполнения подпрограммы DELAY (задержка) составит
TD = 4 + 3*(L – 1) + 4 = 5 + 3*L циклов,
где L – константа, переданная через рабочий регистр в подпрограмму DELAY.
При тактовой частоте fosc = 2МГц время цикла равно tц = 2 мкс, поэтому при загрузке L = H'00' = .0 максимальный формируемый интервал времени составит 1,55 мс. Такой результат связан с тем, что команда DECFSZ сначала декрементирует содержимое регистра (H'00' – 1 = H'FF'), а затем уже анализирует результат.
Минимальный формируемый интервал времени составит при тех же условиях 5 циклов или 10 мкс. Для получения такого интервала необходимо перед вызовом подпрограммы DELAY загрузить в рабочий регистр число 0x01.
Для расширения верхней границы формируемых временных интервалов, а также с целью повышения удобства работы с подпрограммой, можно добавить в цикл LOOPD одну или несколько дополнительных команд, в качестве которых чаще всего используется команда NOP. Для примера рассмотрим подпрограмму формирования задержки времени DELAY_C
Листинг 12.7. (html, txt)
Общее время исполнения подпрограммы DELAY_C, включая ее вызов, составит
TD = 4 + 4*(L – 1) + 4 = 4 + 4*L циклов.
При тактовой частоте fosc = 2МГц и загрузке константы L = H'F9' = .249 формируемый интервал времени составит ровно 2 мс. Уменьшение константы на единицу уменьшает формируемый временной интервал на 8 мкс. В частности, при L = .124 образуется задержка в 1 мс.
Для формирования больших задержек времени, лежащих в диапазоне долей и единиц секунд, такой подход неудобен. В этом случае используются вложенные циклы, как показано в следующем примере.
Листинг 12.8. (html, txt)
Время исполнения внутреннего цикла подпрограммы DELAY_D составляет 3*256 + 4 машинных циклов МК, поэтому общая задержка составит
TD = 5 + (3*256 + 4)*L циклов.
При тактовой частоте fosc = 2МГц время цикла равно tц = 2 мкс, поэтому при загрузке L = H'00' = .0 максимальный формируемый интервал времени составит около 0,4 с.
Поскольку формируемый интервал времени достаточно велик, во внешний цикл включена команда сброса сторожевого таймера.
Интервал времени 0,4 с не совсем удобен для получения задержек времени, кратных секунде, поэтому рассмотрим еще один вариант подпрограммы формирования больших задержек времени с дополнительной командой NOP во внутреннем цикле.
Листинг 12.9. (html, txt)
Время исполнения внутреннего цикла подпрограммы DELAY_E составляет 4*256 + 4 машинных циклов МК, поэтому общая задержка составит
TD = 5 + (4*256 + 4)*L циклов.
При тактовой частоте fosc = 2МГц и при загрузке L = H'F3' = .243 формируемый интервал времени составит около 0,5 с при погрешности не более 0,2%. Если необходима более высокая точность, можно вставить необходимое количество пустых операций во внешний цикл формирования задержки.
Рассмотрим далее несколько программ с использованием подпрограмм формирования задержки времени. Начнем с написания программы, которая подает звуковой сигнал на динамик BA1 при нажатии на кнопку SB1. Динамик будет звучать только в том случае, если на выход RA0 будет подан периодически изменяющийся сигнал. Для того чтобы звук был хорошо слышен, его частота должна находиться вблизи максимума слышимости человеческого уха. Выберем частоту звучания равной 1 КГц, что соответствует периоду следования импульсов сигнала 1 мс.
Листинг 12.10. (html, txt)
Как и раньше, подпрограмма GET_RA считывает текущее состояние порта A, которое затем передается в регистр TEMPA. Подпрограмма SB1_BA1 анализирует состояние разряда 4 регистра TEMPA и, в зависимости от результата, озвучивает динамик BA1 или нет. Необходимая выдержка линии RA0 в единичном и нулевом состояниях обеспечивается подпрограммой DELAY_C с параметром L = H'3E' = .62. Это соответствует времени задержки около 0,5 мс, что и дает в результате необходимую частоту следования сигнала 1 Кгц.
Рассмотрим далее программу, которая заставляет мигать светодиод VD2 при нажатии на кнопку SB1. Для того чтобы мигания были хорошо видны, выберем их частоту равной 1 Гц.
Листинг 12.11. (html, txt)
Программа работает почти так же, как и предыдущая. Первое отличие заключается в том, что светодиод принудительно гасится при не нажатой кнопке. Второе отличие заключается в величине интервала времени, который составляет здесь 0,5 с и формируется подпрограммой DELAY_E.
Подпрограммы формирования задержки времени могут быть также полезны при работе с такими внешними источниками сигналов, как тумблеры, кнопки, переключатели и т.п. Дело в том, что все механические коммутаторы имеют одно негативное свойство, известное как «дребезг» контактов, которое обусловлено механическими колебаниями контактов при их замыкании и размыкании. Длительность колебаний составляет обычно несколько миллисекунд, в течение которых на вход МК может поступать пачка импульсов вместо идеального перепада.
Аппаратные способы борьбы с «дребезгом» контактов основаны на использовании RS-триггеров, одновибраторов или триггеров Шмитта. В устройствах на основе МК подавление «дребезга» контактов обычно осуществляется программными способами, которые основаны на повторном считывании состояния линии порта через определенное время.
В качестве примера рассмотрим «бездребезговый» вариант подпрограммы чтения состояния порта A.
Листинг 12.12. (html, txt)
Суть работы подпрограммы заключается в повторном чтении состояния порта A спустя некоторое время после предыдущего и сравнении его с прежним значением. Константа H'0A' = .10, пересылаемая в регистр W перед вызовом подпрограммы DELAY_E, обеспечивает значение задержки времени около 20 мс - этого, как правило, достаточно для завершения переходных процессов при переключении механических коммутаторов. Маскирование неиспользуемых разрядов порта повышает надежность работы подпрограммы. Сброс сторожевого таймера перед вызовом подпрограммы задержки нужен для исключения сброса МК между двумя процедурами опроса порта A.
Рассмотрим теперь работу программы, которая использует некоторые из разработанных ранее подпрограмм. Пусть целью работы программы является подсчет числа нажатий на кнопку SB1 с выводом результата на семисегментный индикатор в шестнадцатиричном коде.
Листинг 12.13. (html, txt)
Приведенные в главе программы не охватывают и малой доли возможностей, которые предоставляет даже такой простой макет, как изображенный на рис. 6.3. Однако их освоение, надеюсь, будет полезным для начинающих пользователей PIC-контроллеров.
Дата добавления: 2016-05-25; просмотров: 854;